一种变电站除草系统及方法与流程
本发明涉及人工智能领域,特别是涉及一种变电站除草系统及方法。
背景技术:
1、变电站每年夏季变电站都需要定期除草,否则在枯草季节,草一旦起火会造成空气击穿而跳闸,扩大事故范围。传统人工除草,工人满设备区活动,不易于安全管理,同时除草费用高。
技术实现思路
1、本发明的目的是提供一种变电站除草系统及方法,能够低成本且高效的实现变电站除草。
2、为实现上述目的,本发明提供了如下方案:
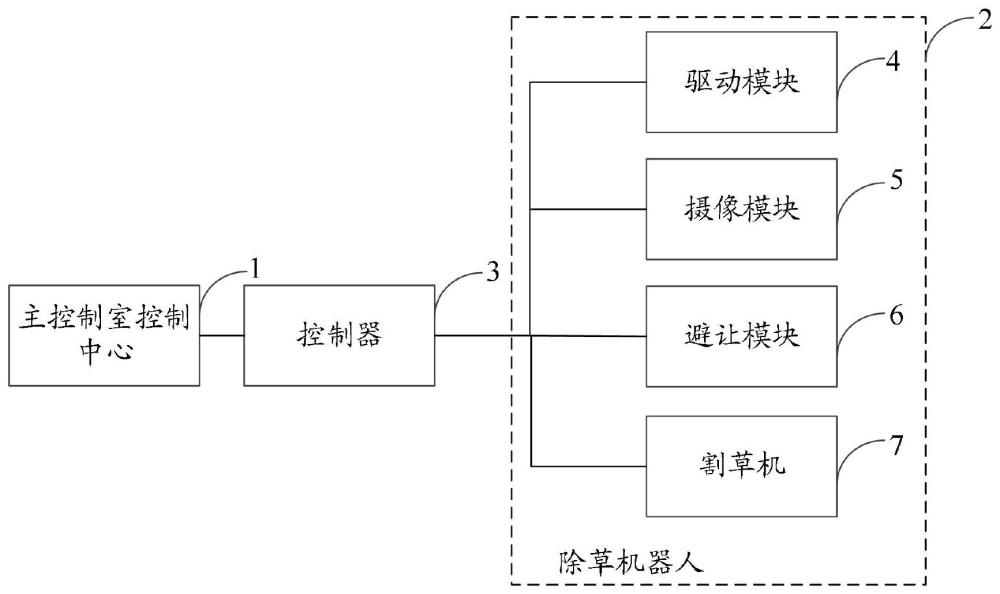
3、一种变电站除草系统,所述系统包括:相互连接的主控制室控制中心和除草机器人;所述除草机器人包括:控制器、驱动模块、摄像模块、避让模块和割草机;
4、所述控制器与所述主控制室控制中心连接;所述驱动模块、所述摄像模块、所述避让模块和所述割草机均与所述控制器连接;
5、所述主控制室控制中心用于发出除草控制指令;
6、所述控制器用于接收所述除草控制指令,并发出控制信号;所述控制信号包括:驱动信号和摄像信号;
7、所述驱动模块用于根据所述驱动信号进行驱动行驶操作;
8、所述摄像模块用于根据所述摄像信号采集变电站周围的图像数据,并将所述图像数据反馈至所述控制器;
9、所述控制器还用于根据所述图像数据确定规划路径;
10、所述避让模块,用于:
11、在所述规划路径上检测变电站周围是否存在障碍物,并将检测结果反馈至所述控制器;
12、根据所述控制器发出的避让指令进行避让;
13、所述割草机用于根据所述控制器发出的除草指令进行除草。
14、可选地,所述驱动模块包括:驱动控制子模块、电机驱动子模块和电机;
15、所述驱动控制子模块与所述控制器连接;所述电机驱动子模块与所述驱动控制子模块连接;所述电机与所述电机驱动子模块连接;
16、所述驱动控制子模块用于接收所述驱动信号,并根据所述驱动信号生成驱动指令;
17、所述电机驱动子模块用于根据所述驱动指令驱动所述电机,以产生动力。
18、可选地,所述避让模块包括:光电式碰撞检测模块和超声波避障模块;
19、所述光电式碰撞检测模块和所述超声波避障模块均与所述控制器连接;
20、所述光电式碰撞检测模块用于在所述规划路径上检测变电站周围是否存在障碍物,并将检测结果反馈至所述控制器;
21、所述超声波避障模块用于根据所述控制器发出的避让指令进行避让。
22、可选地,所述系统还包括:无线模块;
23、所述控制器与所述主控制室控制中心通过所述无线模块连接。
24、可选地,所述系统还包括:车轮;
25、所述车轮设置在所述除草机器人上,且所述车轮与所述电机连接;
26、所述车轮在所述电机的动力下进行转动。
27、可选地,所述系统还包括:里程计;
28、所述里程计设置在所述车轮上;所述里程计用于测量所述车轮转动的行程。
29、一种变电站除草方法,所述方法采用上述所述的系统实现;所述方法包括:
30、采集变电站周围的图像数据;
31、根据所述图像数据确定规划路径;
32、控制避让模块检测在所述规划路径上,变电站周围是否存在障碍物,得到检测结果,并基于所述检测结果控制所述避让模块进行避让;
33、控制驱动模块在所述规划路径上进行驱动行驶,并控制割草机根据除草指令进行除草。
34、根据本发明提供的具体实施例,本发明公开了以下技术效果:
35、本发明提供了一种变电站除草系统及方法,通过控制器接收除草控制指令,并发出控制信号;驱动模块根据驱动信号进行驱动行驶操作;摄像模块根据摄像信号采集变电站周围的图像数据,并将图像数据反馈至控制器;控制器根据图像数据确定规划路径;避让模块在规划路径上检测变电站周围是否存在障碍物,并将检测结果反馈至控制器,根据控制器发出的避让指令进行避让;割草机根据控制器发出的除草指令进行除草;本发明能够低成本且高效的实现变电站除草。
技术特征:
1.一种变电站除草系统,其特征在于,所述系统包括:相互连接的主控制室控制中心和除草机器人;所述除草机器人包括:控制器、驱动模块、摄像模块、避让模块和割草机;
2.根据权利要求1所述的变电站除草系统,其特征在于,所述驱动模块包括:驱动控制子模块、电机驱动子模块和电机;
3.根据权利要求1所述的变电站除草系统,其特征在于,所述避让模块包括:光电式碰撞检测模块和超声波避障模块;
4.根据权利要求1所述的变电站除草系统,其特征在于,所述系统还包括:无线模块;
5.根据权利要求2所述的变电站除草系统,其特征在于,所述系统还包括:车轮;
6.根据权利要求5所述的变电站除草系统,其特征在于,所述系统还包括:里程计;
7.一种变电站除草方法,其特征在于,所述方法采用权利要求1-6中任意一项所述的系统实现;所述方法包括:
技术总结
本发明公开一种变电站除草系统及方法,涉及人工智能领域;通过主控制室控制中心发出除草控制指令;控制器接收除草控制指令,并发出控制信号;驱动模块根据驱动信号进行驱动行驶操作;摄像模块根据摄像信号采集变电站周围的图像数据,并将图像数据反馈至控制器;控制器根据图像数据确定规划路径;避让模块在规划路径上检测变电站周围是否存在障碍物,并将检测结果反馈至控制器,根据控制器发出的避让指令进行避让;割草机根据控制器发出的除草指令进行除草;本发明能够低成本且高效的实现变电站除草。
技术研发人员:杨跃雷,刘志勇,刘志杰,王春节,燕语,赵磊,何志刚,郭晓宇,刘沛,刘缘缘,刘向波
受保护的技术使用者:内蒙古电力(集团)有限责任公司锡林郭勒超高压供电分公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!