水轮机调节系统控制参数与振荡特性关联方法及系统
本发明属于水轮机调节系统振荡特性分析,更具体地,涉及水轮机调节系统控制参数与振荡特性关联方法及系统。
背景技术:
1、近年来,水电主导系统超低频振荡频发,这将降低系统的供电品质与长距离送电容量,使得调频单元调速器,从而缩短调速器的使用寿命。在严重的情况下,超低频振荡可能导致继电保护单元的大规模运行,这可能导致大面积停电。水轮机调节系统控制参数显著影响水电系统调节特性,明确不同控制参数对应的系统振荡是保障系统安全稳定运行的基础,控制参数的细致分区对控制参数的调整和优化至关重要。以往确定系统控制参数对应的系统的振荡特性是采用时域仿真方式,只对调节后的性能进行约束,没有对控制参数进行分区,这不利于操作人员的快速调整以及对系统振荡特性的理解。因此,提出了一种水轮机调节系统控制参数与振荡特性关联方法,将系统的调节振荡特性直观反映在控制参数稳定域的详细划分中,控制参数稳定域被划分为超低频振荡风险区、超低频振荡安全区等。这有助于运行人员快速评估参数设置对系统振荡的影响、明确风险运行的参数边界,从而推动机组安全运行。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供水轮机调节系统控制参数与振荡特性关联方法及系统,旨在解决现有对于水轮机调节系统,确定系统控制参数对应的系统的振荡特性是采用时域仿真方法,只对调节后的性能进行约束,没有对控制参数进行分区,导致无法直观地获取控制参数与系统振荡之间的关系,因此,无法通过快速调节控制参数保证水轮机组的安全运行的问题。
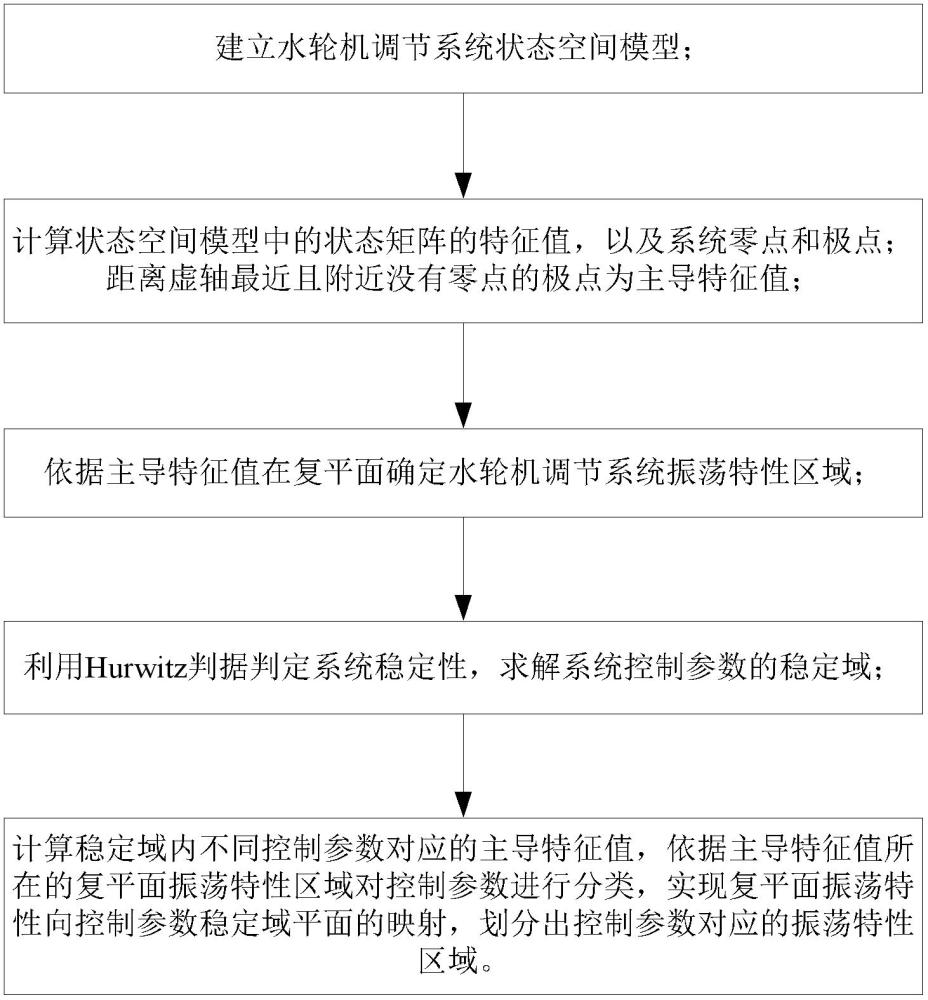
2、为实现上述目的,一方面,本发明提供了水轮机调节系统控制参数与振荡特性关联方法,包括以下步骤:
3、步骤一:计算水轮机调节系统状态空间模型中状态矩阵的特征值以及零点和极点,将距离虚轴最近且预设距离内没有零点的极点作为主导特征值;
4、步骤二:根据主导特征值,在复平面确定水轮机调节系统振荡特性区域;
5、步骤三:将水轮机调节系统状态空间模型转换为传递函数模型,提取传递函数模型的特征方程,由赫尔维茨稳定性判据,获取系统控制参数稳定域;
6、步骤四:计算系统控制参数稳定域内不同控制参数对应的主导特征值,依据主导特征值所在复平面的水轮机调节系统振荡特性区域,对系统控制参数稳定域中的控制参数进行分类,在系统控制参数稳定域中划分出水轮机调节系统振荡特性区域。
7、进一步优选地,水轮机调节系统振荡特性区域的划分方法为:采用主导特征值的虚部确定系统振荡频率,将复平面划分为无振荡区、0~0.01hz振荡区、超低频振荡区和0.1hz以上的振荡区;采用主导特征值的实部确定系统衰减速率,将复平面内的超低频振荡区划分为超低频振荡安全区和超低频振荡风险区;其中,实部小于等于-0.07则划分为超低频振荡安全区,否则划分为超低频振荡风险区。
8、进一步优选地,水轮机调节系统状态空间模型包括调速器子模型、引水模块子模型、水轮机子模型和发电机子模型。
9、进一步优选地,传递函数模型的特征方程为:
10、
11、其中,为特征值,为特征方程系数,;为系统阶数,由状态空间模型中的状态变量数目决定。
12、进一步优选地,步骤四具体为:按照固定步长枚举控制参数稳定域内控制参数,计算各控制参数对应的主导特征值,依据主导特征值所在的复平面的水轮机调节系统振荡特性区域,对系统控制参数稳定域中的控制参数进行分类,计算出无振荡区、0~0.01hz振荡区、超低频振荡区以及0.1hz以上的振荡区对应的控制参数,实现水轮机调节系统振荡特性区域向控制参数稳定域平面的映射。
13、另一方面,本发明提供了水轮机调节系统控制参数与振荡特性关联系统,包括:
14、水轮机调节系统状态空间模型的构建模块,用于构建水轮机调节系统状态空间模型;
15、主导特征值获取模块,用于计算水轮机调节系统状态空间模型中状态矩阵的特征值以及零点和极点,将距离虚轴最近且预设距离内没有零点的极点作为主导特征值;
16、水轮机调节系统振荡特性区域的确定模块,用于根据主导特征值,在复平面确定水轮机调节系统振荡特性区域;
17、系统控制参数稳定域的获取模块,用于将水轮机调节系统状态空间模型转换为传递函数模型,提取传递函数模型的特征方程,由赫尔维茨稳定性判据,获取系统控制参数稳定域;
18、系统控制参数稳定域划分模块,用于计算系统控制参数稳定域内不同控制参数对应的主导特征值,依据主导特征值所在复平面的水轮机调节系统振荡特性区域,对系统控制参数稳定域中的控制参数进行分类,在系统控制参数稳定域中划分出水轮机调节系统振荡特性区域。
19、进一步优选地,水轮机调节系统振荡特性区域的划分方法为:采用主导特征值的虚部确定系统振荡频率,将复平面划分为无振荡区、0~0.01hz振荡区、超低频振荡区和0.1hz以上的振荡区;采用主导特征值的实部确定系统衰减速率,将复平面内的超低频振荡区划分为超低频振荡安全区和超低频振荡风险区;其中,实部小于等于-0.07则划分为超低频振荡安全区,否则划分为超低频振荡风险区。
20、进一步优选地,水轮机调节系统状态空间模型包括调速器子模型、引水模块子模型、水轮机子模型和发电机子模型。
21、进一步优选地,系统控制参数稳定域的获取模块中的传递函数模型的特征方程为:
22、
23、其中,为特征值,为特征方程系数,;为系统阶数,由状态空间模型中的状态变量数目决定。
24、进一步优选地,系统控制参数稳定域划分模块具体划分系统控制参数稳定域的方法为:按照固定步长枚举控制参数稳定域内控制参数,计算各控制参数对应的主导特征值,依据主导特征值所在的复平面的水轮机调节系统振荡特性区域,对系统控制参数稳定域中的控制参数进行分类,计算出无振荡区、0~0.01hz振荡区、超低频振荡区以及0.1hz以上的振荡区对应的控制参数,实现水轮机调节系统振荡特性区域向控制参数稳定域平面的映射。
25、第三方面,本技术提供一种电子设备,包括:至少一个存储器,用于存储程序;至少一个处理器,用于执行存储器存储的程序,当存储器存储的程序被执行时,处理器用于执行第一方面或第一方面的任一种进一步优选地所描述的方法。
26、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,当计算机程序在处理器上运行时,使得处理器执行第一方面或第一方面的任一种进一步优选地所描述的方法。
27、第五方面,本技术提供一种计算机程序产品,当计算机程序产品在处理器上运行时,使得处理器执行第一方面或第一方面的任一种进一步优选地所描述的方法。
28、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
29、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
30、本发明提供了一种水轮机调节系统控制参数与振荡特性关联方法及系统,其中,首先根据主导特征值,在复平面确定水轮机调节系统振荡特性区域;再将水轮机调节系统状态空间模型转换为传递函数模型,提取传递函数模型的特征方程,由赫尔维茨稳定性判据,获取系统控制参数稳定域;计算系统控制参数稳定域内不同控制参数对应的主导特征值,依据主导特征值所在复平面的水轮机调节系统振荡特性区域,对系统控制参数稳定域中的控制参数进行分类,在系统控制参数稳定域中划分出水轮机调节系统振荡特性区域。从中可以看出,本发明建立了控制参数的详细分区,不仅可以区别控制参数是否能使水轮机调节系统稳定,还可以区别控制参数是否使得水轮机调节系统产生振荡,产生什么频段的振荡,产生的振荡能否快速衰减。相比于以往确定系统控制参数对应的振荡特性是采用时域仿真方式(需要求算和),本发明由于在系统控制参数稳定域中划分出了水轮机调节系统振荡特性区域,每次对控制参数进行调整可以直接获取对应的水轮机调节系统振荡特性,大大降低了控制参数的处理复杂度。且现有控制参数的调节往往需要运行人员的评估,而本发明获取的划分后的系统控制参数稳定域适用于任何操作人员参考也可以采用计算机等智能设备对水轮机调节系统进行控制。简化了运行人员评估控制参数设置对系统振荡的影响。
31、本发明提供了一种水轮机调节系统控制参数与振荡特性关联方法及系统,其中,复平面振荡特性向控制参数稳定域平面映射,通过控制参数的划分,明确了超低频振荡的控制参数安全调整区域,明确风险运行的参数边界,助力运行人员对控制参数的调整,从而推动了水轮机组的安全运行。
- 还没有人留言评论。精彩留言会获得点赞!