基于拟形的固定翼无人机在线路径规划方法、介质及装置与流程
本发明涉及无人机路径规划,具体而言,涉及一种基于拟形的固定翼无人机在线路径规划方法、介质及装置。
背景技术:
1、无人机具有行动灵活,方便快捷等特点,被广泛地应用于民用和军事领域。无人机在执行任务的过程中,路径规划是一个重要的环节,需要无人机在躲避障碍物的前提下,沿着某一路径由起点飞向终点。
2、传统的固定翼无人机路径规划方法主要依赖于预先设定的航路点和航线规划算法。这些方法往往无法适应复杂多变的飞行环境,且对于动态障碍物的处理能力有限。此外,传统方法通常忽略了无人机的动态性能和机动能力,无法针对不同任务需求进行灵活的路径规划。
3、为了克服这些挑战,近年来涌现了一些新的路径规划技术,例如基于遗传算法、人工神经网络和强化学习的方法。这些技术利用了大数据分析和机器学习的优势,能够更好地处理复杂环境下的路径规划问题。然而,这些方法在实际应用中仍存在一些局限性,包括计算复杂度高、训练数据需求大和实时性较差等。
4、因此,需要提出一种新的固定翼无人机路径规划方法,以克服传统方法和现有技术的局限性。这种方法能够在复杂多变的环境中实现高效、安全和灵活的路径规划,同时考虑无人机的动态性能和机动能力。该方法还应具备实时性,能够适应不同任务需求,并能够自适应地处理动态障碍物和环境变化。
5、在实际场景中部署的固定翼无人机在执行地震灾后救援等特定任务时,需要在机载端限定的时间内在线自适应地处理动态障碍物和环境变化对航线航路带来的影响。固定翼无人机当环境变化时,实时生成新的航线避开障碍物是需要考虑的一个重要因素,现有方法并未对这个因素给予适当回应。
技术实现思路
1、本发明旨在提供一种基于拟形的固定翼无人机在线路径规划方法,以解决有新的禁飞区产生等环境变化时固定翼无人机需要在机载端限定时间内在线完成二次航路重规划的问题。
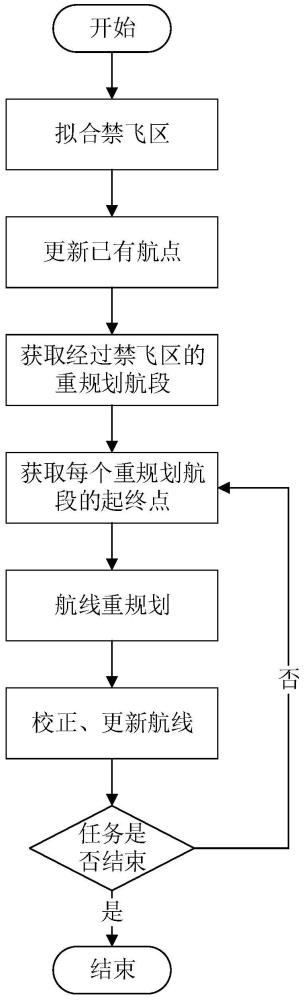
2、本发明提供的一种基于拟形的固定翼无人机在线路径规划方法,包括以下步骤:
3、s1,获取新的禁飞区并拟合成圆形,生成新的现有基本航路;
4、s2,获取新的现有基本航路中经过新的禁飞区拟合圆形的重规划航段;
5、s3,在每个重规划航段内,重规划航路;
6、s4,通过拼接和优化,生成新的航路并校正;
7、s5,判断固定翼无人机在线路径规划任务是否完成,若未完成,则返回步骤s3。
8、进一步的,步骤s1中,获取新的禁飞区并拟合成圆形,生成新的现有基本航路包括:
9、获取新的禁飞区;
10、拟合新的禁飞区的最小外接圆,得到最小外接圆的中心点和半径;
11、获取现有基本航路的航点,将固定翼无人机当前位置也作为一个航点;
12、根据新的禁飞区的最小外接圆,删除现有基本航路中在新的禁飞区的最小外接圆内的航点,将剩余的航点组成新的现有基本航路。
13、进一步的,步骤s2中,获取新的现有基本航路中经过新的禁飞区拟合圆形的重规划航段包括:
14、将新的现有基本航路中两两航点之间的航线作为一个航段;
15、依次检查每个航段是否经过了新的禁飞区的最小外接圆;
16、将经过新的禁飞区的最小外接圆的航段作为重规划航段。
17、进一步的,步骤s3中,在每个重规划航段内,重规划航路包括:
18、在每个重规划航段内,求得重规划航段经过新的禁飞区的最小外接圆的弦长x,以及重规划航段上距离新的禁飞区的最小外接圆y=x/2的2个航点;
19、将这2个航点作为起始点和终止点,基于固定翼无人机本身的飞行性能,运用改进的快速随机树算法rrt*,生成避开新的禁飞区的航路。
20、进一步的,步骤s4中,通过拼接和优化,生成新的航路并校正包括:
21、优化步骤s3生成的航路:步骤s3生成的航路中,从起始点开始,依次比较航点与之后的航点是否经过新的禁飞区的最小外接圆,如果没有经过新的禁飞区的最小外接圆,航点之间的直线距离小于重规划前航段的距离且满足固定翼无人机的转弯半径要求,则删除中间航点,直至优化完成;
22、将优化后的步骤s3生成的航路与新的现有基本航路中无需重规划的航段拼接成新的航路;
23、校正新的航路中每个航点是否符合要求,以及校正新的航路中每个航段是否符合要求。
24、进一步的,步骤s4中,校正新的航路中每个航点是否符合要求包括:
25、校正新的航路中每个航点是否在禁飞区内;
26、以及新的航路中每个航点是否满足航点飞行高度要求。
27、进一步的,步骤s4中,校正新的航路中每个航段是否符合要求包括:
28、校正新的航路中每个航段是否满足固定翼无人机的转弯半径要求;
29、以及校正新的航路中每个航段是否经过禁飞区。
30、进一步的,步骤s5中,判断固定翼无人机在线路径规划任务是否完成包括:
31、基于步骤s4对新的航路的校正结果判断固定翼无人机在线路径规划任务是否完成;如果校正结果不符合要求,则继续返回步骤s3,否则结束固定翼无人机在线路径规划的流程。
32、本发明还提供一种计算机终端存储介质,存储有计算机终端可执行指令,所述计算机终端可执行指令用于执行上述的基于拟形的固定翼无人机在线路径规划方法。
33、本发明还提供一种计算装置,包括:
34、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的基于拟形的固定翼无人机在线路径规划方法。
35、综上所述,由于采用了上述技术方案,本发明的有益效果是:
36、本发明设计合理、高效,能有效地利用固定翼无人机的固有特性,解决有新的禁飞区产生等环境变化时固定翼无人机需要在机载端限定时间内在线完成二次航路重规划的问题。
技术特征:
1.一种基于拟形的固定翼无人机在线路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s1中,获取新的禁飞区并拟合成圆形,生成新的现有基本航路包括:
3.根据权利要求2所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s2中,获取新的现有基本航路中经过新的禁飞区拟合圆形的重规划航段包括:
4.根据权利要求3所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s3中,在每个重规划航段内,重规划航路包括:
5.根据权利要求4所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s4中,通过拼接和优化,生成新的航路并校正包括:
6.根据权利要求5所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s4中,校正新的航路中每个航点是否符合要求包括:
7.根据权利要求1所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s4中,校正新的航路中每个航段是否符合要求包括:
8.根据权利要求1所述的基于拟形的固定翼无人机在线路径规划方法,其特征在于,步骤s5中,判断固定翼无人机在线路径规划任务是否完成包括:
9.一种计算机终端存储介质,存储有计算机终端可执行指令,其特征在于,所述计算机终端可执行指令用于执行如权利要求1-8中任一权利要求所述的基于拟形的固定翼无人机在线路径规划方法。
10.一种计算装置,其特征在于,包括:
技术总结
本发明涉及无人机路径规划技术领域,提供了一种基于拟形的固定翼无人机在线路径规划方法、介质及装置,所述方法包括以下步骤:S1,获取新的禁飞区并拟合成圆形,生成新的现有基本航路;S2,获取新的现有基本航路中经过新的禁飞区拟合圆形的重规划航段;S3,在每个重规划航段内,重规划航路;S4,通过拼接和优化,生成新的航路并校正;S5,判断固定翼无人机在线路径规划任务是否完成,若未完成,则返回步骤S3。本发明设计合理、高效,能有效地利用固定翼无人机的固有特性,解决有新的禁飞区产生等环境变化时固定翼无人机需要在机载端限定时间内在线完成二次航路重规划的问题。
技术研发人员:宋艳平,于欢,李劲杰,陆艳辉,宁文辉,贾怀智
受保护的技术使用者:四川腾盾科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!