一种基于改进九线法的数控机床几何误差辨识方法及装置
本发明涉及测量,尤其涉及一种基于改进九线法的数控机床几何误差辨识方法及装置。
背景技术:
1、九线法是一种间接性获取数控机床几何误差的辨识方法,其凭借测量过程简单、辨识模型直观且容易理解等优点得到业内的广泛使用。
2、下面是九线法辨识的一般过程:
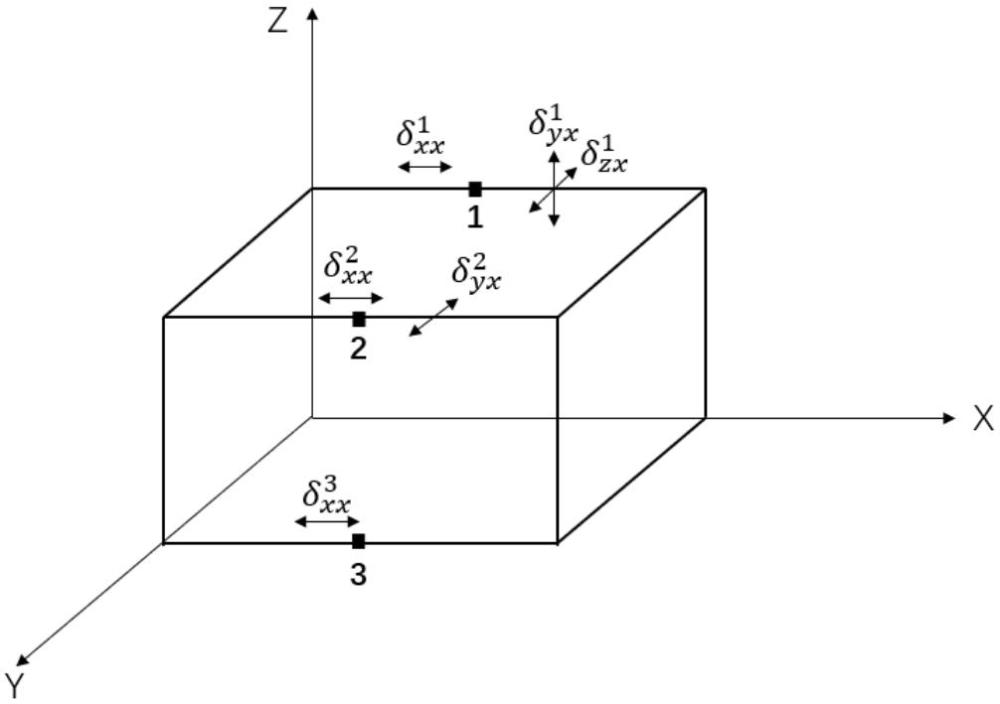
3、测量下图1所示三条轨迹线上的定位/直线度误差代入式(1)中,同时将轨迹上对应的坐标值()也代入该式中,改写成矩阵式(2),可以解得等号右侧的六项误差值,
4、(1)
5、将其改写成矩阵形式
6、(2)
7、但是应用传统的九线法存在以下问题:
8、1.如图1所示,九线法单轴方向需对三条测量轨迹进行六次测量,测量三轴的全部误差需要“九线十八次测量”。该过程在单一路径上重复测量多项误差,测量路径单薄,收集到的误差信息较少,对空间内各点的误差概括性较低,需要在不增加测量次数的情况下对测量路径进行密集化处理。
9、2.在不同坐标点下进行的大量的测量试验中发现辨识结果受到测量点坐标的影响很大,故而在不同的测量点位下,其辨识结果也有较大差异。
10、3.使用机床坐标系代替测量坐标系,忽略了图2所示运动链之间各刚体的误差传递,根据多体系统运动学理论,九线法的辨识结果仅反映了工件坐标系与刀具坐标系之间的误差特征,实际上该结果是由这两个坐标系之间x、y和z轴工作台以及主轴、床身等众多刚体之间误差叠加后的结果,不能准确描述所需的误差值。
技术实现思路
1、本发明的目的是为了至少解决现有技术的不足之一,提供一种基于改进九线法的数控机床几何误差辨识方法及装置。
2、为了实现上述目的,本发明采用以下的技术方案:
3、具体的,提出一种基于改进九线法的数控机床几何误差辨识方法,包括以下:
4、步骤110、基于多体系统运动学理论结合机床拓扑结构将各刚体之间的运动误差叠加以构建综合误差模型,基于所述综合误差模型结合预设的适应度函数进行寻优预测出六个最佳测量位置;
5、步骤120、于每个所述最佳测量位置处,建立与x、y、z轴中任意单一运动轴方向平行的线性测量轨迹,共得到六条线性测量轨迹,对每条线性轨迹测量特定的一项误差项,得到具有六个方程的方程组;
6、步骤130、基于所述方程组进行数控机床几何误差仿真辨识。
7、进一步,具体的,基于多体系统运动学理论结合机床拓扑结构将各刚体之间的运动误差叠加以构建综合误差模型,包括,
8、假定机床在初始状态下,在机床上创建参考坐标系r,分别在x、y、z向工作台,主轴s,刀具t,工件w上创建局部坐标系x、y、z、s、t、w,方向与参考坐标系r一致;
9、由于z轴与主轴和刀具直接相连,无相对运动,因此,为坐标系z到主轴坐标系s的齐次变换矩阵;主轴与刀具直接相连,因此,为主轴坐标系s到刀具坐标系t的齐次变换矩阵;工件与机床直接相连,因此,为工件坐标系w到参考坐标系r的齐次变换矩阵;
10、无误差状态下,机床分别沿x、y、z方向移动距离时,工件坐标系w到刀具坐标系t的齐次变换矩阵为:
11、(8)
12、有误差状态下,基于小误差假设和齐次坐标变换原理,当机床分别沿x、y、z方向移动距离时工件坐标系w到刀具坐标系t的变换矩阵为:
13、(12)
14、此时工件坐标系w到刀具坐标系t的齐次变换矩阵能够视为无误差状态的基础上叠加一个有误差状态下的误差运动变换矩阵,因此有:
15、(13)
16、基于小误差假设,工件坐标系w到刀具坐标系t误差运动变换矩阵为:
17、(14)
18、其中,、、为刀具实际切削点相对于理想切削点的位置误差;、、为刀具实际切削点相对于理想切削点的方向误差;
19、将式(8)、(12)、(14)带入式(13),基于小误差假设并忽略二阶及二阶以上小量,同时剔除三向平动带来的距离,可得工件坐标系w到刀具坐标系t的误差运动变换矩阵,
20、(15)
21、将、、对应式(15)等号右侧的矩阵将对应项提取就得到了综合误差模型如下(16)所示,
22、(16)。
23、进一步,具体的,基于所述综合误差模型结合预设的适应度函数进行寻优预测出六个最佳测量位置,包括,
24、以任意六个测量点的坐标值作为一个测量组合,每个组合作为一个个体,引入预设的适应度函数对每个个体进行评价,以适应度最小的个体作为最优个体,将最优个体所对应的六个测量点作为六个最佳测量位置。
25、进一步,具体的,寻找最优个体的过程包括,
26、步骤210、对个体进行编码,并初始化种群;
27、步骤220、通过适应度函数来评价种群中每个个体的适应度;
28、步骤230、判断个体是否满秩为6,若否则随机赋予当前个体一个预设的极大的适应度作为不合格个体返回原群体,若否则判断是否满足预设的迭代次数即终止条件;
29、步骤250、若满足终止条件则完成寻优,若不满足终止条件则进行选择、交叉、变异操作以产生新一代群体返回步骤220中继续运行。
30、进一步,具体的,适应度函数的建立过程包括,
31、通过matlab中的meshgrid矩阵对测量空间中的各变量进行展开至相同大小的矩阵;
32、通过综合误差模型对各变量所展开的矩阵进行运算得到各变量对应的相同大小的综合误差矩阵,得到基于综合误差模型的用于描述整个测量空间的数学模型;
33、基于所述数学模型计算个体误差差值均值的标准差以及变异系数作为辨识结果。
34、本发明还提出一种基于改进九线法的数控机床几何误差辨识装置,包括以下:
35、综合误差模型建立模块,用于基于多体系统运动学理论结合机床拓扑结构将各刚体之间的运动误差叠加以构建综合误差模型,基于所述综合误差模型结合预设的适应度函数进行寻优预测出六个最佳测量位置;
36、测量方程组建立模块,用于于每个所述最佳测量位置处,建立与x、y、z轴中任意单一运动轴方向平行的线性测量轨迹,共得到六条线性测量轨迹,对每条线性轨迹测量特定的一项误差项,得到具有六个方程的方程组;
37、仿真辨识模块,用于基于所述方程组进行数控机床几何误差仿真辨识。
38、本发明的有益效果为:
39、本发明提供的一种基于改进九线法的数控机床几何误差辨识方法,
40、一方面由九线法的辨识过程可以看出辨识方程组决定了实际操作时的测量策略,本发明通过改变其辨识方程组的组合方式达到优化测量策略的目的,即在不增加测量次数的条件下对测量轨迹进行密集化处理,以收集到更多的空间内的误差信息;
41、另一方面本发明通过计算机模拟出一个基于对象机床拓扑结构建立的综合误差场,由自适应遗传算法在该误差场内遍历搜索、预测各点处的辨识结果,最终获得对辨识结果影响最小的测量位置。
- 还没有人留言评论。精彩留言会获得点赞!