无人机避障方法、装置、存储介质及设备与流程
本发明涉及无人机巡航领域,具体涉及无人机避障方法、装置、存储介质及设备。
背景技术:
1、随着无人机不断体现出的性价比高、灵活性高、飞行成本低等优势和特点,在执行任务过程中机动性好、隐蔽性高并且不存在人身安全问题,适合在枯燥、恶劣的环境中工作。由于电力系统的分布范围广、电力设备所在环境恶劣,无人机在电力巡检方面得到大规模的推广应用,逐渐进入无人操控自动巡检作业的阶段。
2、然而无人机的作业范围不断扩大,所面临的环境也日益复杂,存在树木、建筑物、高山等多种障碍。进一步的,由于10kv架空线路裸导线存在较强的反射性,在光照强烈的情况下无人机的视觉避障容易收到极大的干扰,而且由于导线直径较小,无人机的超声波传感器较难准确检测导线的具体位置,容易出现无人机与导线碰撞的情况。
技术实现思路
1、基于此,本发明提供无人机避障方法、装置、存储介质及设备,通过多种传感器结合的方式获取多种传感器数据,提高无人机作业的避障安全性。
2、第一方面,本发明提供一种无人机避障方法,包括:
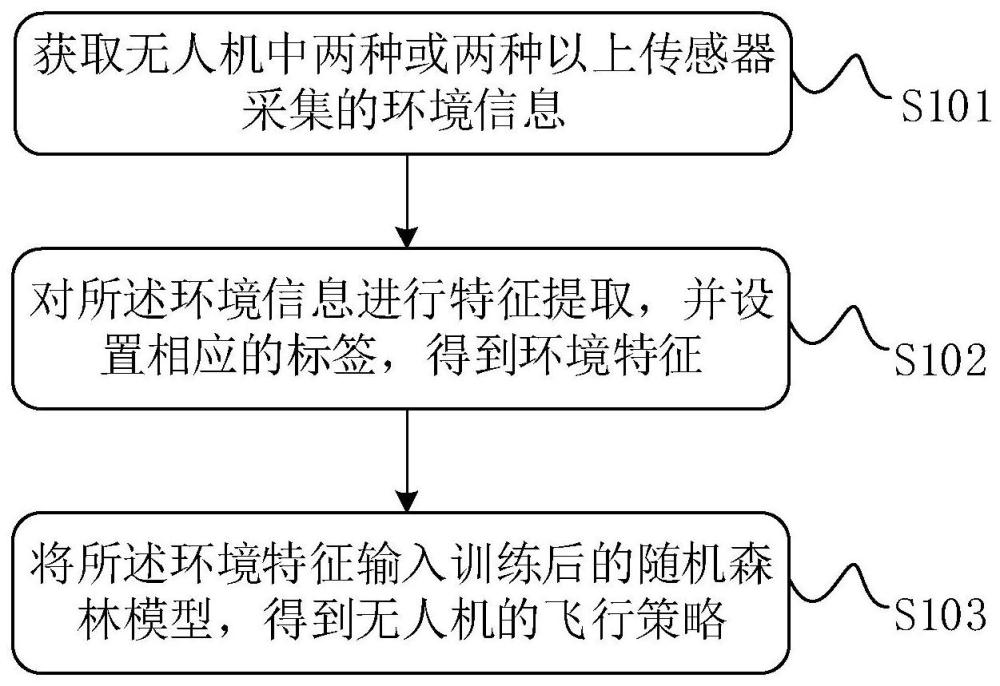
3、获取无人机中两种或两种以上传感器采集的环境信息;
4、对所述环境信息进行特征提取,并设置相应的标签,得到环境特征;
5、将所述环境特征输入训练后的随机森林模型,得到无人机的飞行决策。
6、进一步的,所述两种或两种以上传感器包括毫米波传感器、视觉传感器、超声波传感器的任意两种或两种以上的组合。
7、进一步的,所述对所述环境信息进行特征提取,并设置相应的标签,得到环境特征,包括:
8、对所述环境信息进行特征提取,得到障碍物的特征信息、目标的特征信息、无人机的特征信息中的任意至少一种特征;
9、根据所述特征设置相应的标签,并将所述特征与标签结合得到环境特征。
10、进一步的,所述障碍物的特征信息包括障碍物的坐标信息、障碍物的尺寸信息和障碍物的距离信息中的至少一个特征信息;
11、所述目标的特征信息包括目标的坐标信息、目标的尺寸信息和目标的距离信息中的至少一个特征信息;
12、所述无人机的特征信息包括无人机的位置信息、无人机的飞行高度、无人机的飞行速度和无人机的飞行角度中的至少一个特征信息;
13、所述标签包括障碍物的类型、目标的类型或无人机的飞行动作。
14、进一步的,所述无人机的飞行决策包括无人机的飞行方向、无人机的飞行速度和无人机的飞行高度中的至少一个。
15、进一步的,所述将所述环境特征输入训练后的随机森林模型,得到无人机的飞行决策包括:
16、将环境特征分别输入随机森林模型中的随机若干个决策树模型,得到若干个初步飞行决策;
17、对所述若干个初步飞行决策进行投票处理,得到无人机的飞行决策。
18、进一步的,所述随机森林模型的训练过程包括:
19、步骤s401,获取环境特征样本集合;
20、步骤s402,从所述环境特征样本集合中抽取任意一个环境特征样本,将所述环境特征样本输入随机森林模型中若干个决策树模型;
21、步骤s403,在任意一个决策树模型中,计算所述环境特征样本所在节点的基尼系数,若所述基尼系数满足分裂条件,则将当前环境特征样本所在的节点分裂为两个新的节点;
22、步骤s404,重复执行步骤s403,直至节点的基尼系数小于第一阈值,输出初步飞行决策;
23、步骤s405,对所述若干个决策树模型输出的初步飞行决策进行投票处理,将得票最多的初步飞行决策确定为无人机的飞行决策。
24、第二方面,本发明还提供一种无人机避障装置,包括:
25、环境信息采集模块,用于获取无人机中两种或两种以上传感器采集的环境信息;
26、环境特征提取模块,用于对所述环境信息进行特征提取,并设置相应的标签,得到环境特征;
27、飞行决策确定模块,用于将所述环境特征输入训练后的随机森林模型,得到无人机的飞行决策。
28、第三方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项无人机避障方法的步骤。
29、第四方面,本发明还提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时,执行第一方面中任一项无人机避障方法。
30、采用上述技术方法的有益效果为:通过融合多种传感器的数据,使采集的环境信息更加完整,能够更加清晰掌握障碍物信息和目标信息,提高无人机对未知环境中障碍物的识别能力。并且通过随机森林的方法得到无人机的飞行决策,避免了模型不稳定就决策导致无人机频繁改变飞行方案的问题,提高了飞行决策的稳定性。
技术特征:
1.一种无人机避障方法,其特征在于,包括:
2.如权利要求1所述的无人机避障方法,其特征在于,所述无人机中两种或两种以上传感器包括毫米波传感器、视觉传感器、超声波传感器的任意两种或两种以上的组合。
3.如权利要求1所述的无人机避障方法,其特征在于,所述对所述环境信息进行特征提取,并设置相应的标签,得到环境特征,包括:
4.如权利要求3所述的无人机避障方法,其特征在于,所述障碍物的特征信息包括障碍物的坐标信息、障碍物的尺寸信息和障碍物的距离信息中的至少一个特征信息;
5.如权利要求1所述的无人机避障方法,其特征在于,所述无人机的飞行决策包括无人机的飞行方向、无人机的飞行速度和无人机的飞行高度中的至少一个。
6.如权利要求1所述的无人机避障方法,其特征在于,所述将所述环境特征输入训练后的随机森林模型,得到无人机的飞行决策包括:
7.如权利要求6所述的无人机避障方法,其特征在于,所述随机森林模型的训练过程包括:
8.一种无人机避障装置,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7中任一项无人机避障方法的步骤。
10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时,执行权利要求1-7中任一项无人机避障方法。
技术总结
本发明提供无人机避障方法、装置、存储介质及设备,包括:获取无人机中两种或两种以上传感器采集的环境信息;对所述环境信息进行特征提取,并设置相应的标签,得到环境特征;将所述环境特征输入训练后的随机森林模型,得到无人机的飞行决策。通过融合多种传感器的数据,使采集的环境信息更加完整,能够更加清晰掌握障碍物信息和目标信息,提高无人机对未知环境中障碍物的识别能力。并且通过随机森林的方法得到无人机的飞行决策,避免了模型不稳定就决策导致无人机频繁改变飞行方案的问题,提高了飞行决策的稳定性。
技术研发人员:李一贤,肖铭杰,叶洪江,陆海应,王晓聪,何治安,陈创升,马永龙,游亚雄,骆杰平,伍栩京
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!