一种无人机系统全自动着陆试飞验证评估方法及装置与流程
本申请属于无人机试飞,特别涉及一种无人机系统全自动着陆试飞验证评估方法及装置。
背景技术:
1、随着科学技术的不断发展,无人机的应用得到了空前的发展,与有人驾驶飞机相比,无人机往往更适合相对危险的任务。实现高精度的无人机着陆回收,是无人机任务执行的保障和前提,在无人机服役前需要对无人机的着陆回收的精度进行验证评估。现有技术中针对无人机着陆回收的精度的验证评估方式还存在不够全面的问题。
2、因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现思路
1、本申请的目的是提供了一种无人机系统全自动着陆试飞验证评估方法及装置,以解决现有技术存在的至少一个问题。
2、本申请的技术方案是:
3、本申请的第一个方面提供了一种无人机系统全自动着陆试飞验证评估方法,包括:
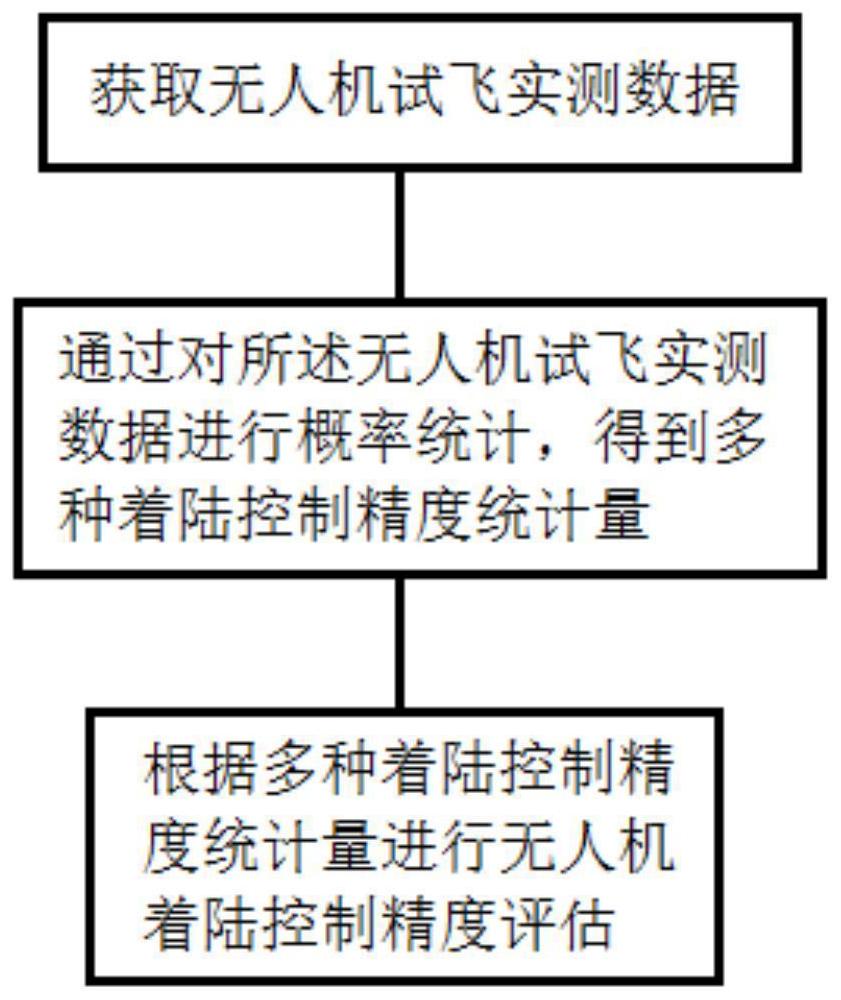
4、步骤一、获取无人机试飞实测数据;
5、步骤二、通过对所述无人机试飞实测数据进行概率统计,得到闭环系统着陆控制精度统计量、雷达引导系统着陆控制精度统计量、差分卫导系统着陆控制精度统计量以及机载控制系统着陆控制精度统计量;
6、步骤三、根据所述闭环系统着陆控制精度统计量、所述雷达引导系统着陆控制精度统计量、所述差分卫导系统着陆控制精度统计量以及所述机载控制系统着陆控制精度统计量进行无人机着陆控制精度评估。
7、在本申请的至少一个实施例中,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到闭环系统着陆控制精度统计量,包括:
8、从所述无人机试飞实测数据中获取着陆接地点偏差值,通过概率统计得到闭环系统着陆控制精度统计量,其中:
9、1σ置信水平(1-α)=68.26%=0.6826
10、α=0.3174
11、
12、采用t分布进行参数估计,σ2未知,样本标准差s来代替σ,得到闭环系统着陆控制精度统计量:
13、
14、根据t分布,给出1σ置信区间为:
15、
16、在本申请的至少一个实施例中,所述着陆接地点偏差值包括着陆接地点纵向偏差值、着陆接地点横向偏差值。
17、在本申请的至少一个实施例中,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到雷达引导系统着陆控制精度统计量,包括:
18、从所述无人机试飞实测数据中获取机上测试系统测得的引导相对位置参数x、y、z,将其与雷达引导系统给出的相对位置参数x、y、z进行对比得出雷达引导偏差值,通过概率统计得到雷达引导系统着陆控制精度统计量,其中:
19、3σ置信水平(1-α)=99.73%=0.9973
20、α=0.0027
21、
22、采用t分布进行参数估计,σ2未知,样本标准差s来代替σ,得到雷达引导系统着陆控制精度统计量:
23、
24、根据t分布,给出3σ置信区间为:
25、
26、在本申请的至少一个实施例中,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到差分卫导系统着陆控制精度统计量,包括:
27、从所述无人机试飞实测数据中获取机上测试系统测得的引导相对位置参数x、y、z,将其与差分卫导系统给出的相对位置参数x、y、z进行对比得出差分卫导偏差值,通过概率统计得到差分卫导系统着陆控制精度统计量,其中,
28、2σ置信水平(1-α)=95.45%=0.9545
29、α=0.0454
30、
31、采用t分布进行参数估计,σ2未知,样本标准差s来代替σ,得到差分卫导系统着陆控制精度统计量:
32、
33、根据t分布,给出2σ置信区间为:
34、
35、在本申请的至少一个实施例中,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到机载控制系统着陆控制精度统计量,包括:
36、从所述无人机试飞实测数据中获取机载控制系统给出的水平及垂直方向上的偏差值,通过概率统计得到机载控制系统着陆控制精度统计量,其中:
37、2σ置信水平(1-α)=95.45%=0.9545
38、α=0.0454
39、
40、采用t分布进行参数估计,σ2未知,样本标准差s来代替σ,得到机载控制系统着陆控制精度统计量:
41、
42、根据t分布,给出2σ置信区间为:
43、
44、本申请的第二个方面提供了一种无人机系统全自动着陆试飞验证评估装置,基于如上所述的无人机系统全自动着陆试飞验证评估方法,包括:
45、数据获取模块,用于获取无人机试飞实测数据;
46、着陆控制精度统计量获取模块,用于通过对所述无人机试飞实测数据进行概率统计,得到闭环系统着陆控制精度统计量、雷达引导系统着陆控制精度统计量、差分卫导系统着陆控制精度统计量以及机载控制系统着陆控制精度统计量;
47、着陆控制精度评估模块,用于根据所述闭环系统着陆控制精度统计量、所述雷达引导系统着陆控制精度统计量、所述差分卫导系统着陆控制精度统计量以及所述机载控制系统着陆控制精度统计量进行无人机着陆控制精度评估。
48、发明至少存在以下有益技术效果:
49、本申请的无人机系统全自动着陆试飞验证评估方法,能够实现小样本量下的无人机系统全自动着陆精度试飞评估,提高了着陆精度评估的全面性。
技术特征:
1.一种无人机系统全自动着陆试飞验证评估方法,其特征在于,包括:
2.根据权利要求1所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到闭环系统着陆控制精度统计量,包括:
3.根据权利要求2所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,所述着陆接地点偏差值包括着陆接地点纵向偏差值、着陆接地点横向偏差值。
4.根据权利要求1所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到雷达引导系统着陆控制精度统计量,包括:
5.根据权利要求1所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到差分卫导系统着陆控制精度统计量,包括:
6.根据权利要求1所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,步骤二中,所述通过对所述无人机试飞实测数据进行概率统计,得到机载控制系统着陆控制精度统计量,包括:
7.一种无人机系统全自动着陆试飞验证评估装置,基于权利要求1至6任意一项所述的无人机系统全自动着陆试飞验证评估方法,其特征在于,包括:
技术总结
本申请属于无人机试飞技术领域,特别涉及一种无人机系统全自动着陆试飞验证评估方法及装置。包括:步骤一、获取无人机试飞实测数据;步骤二、通过对所述无人机试飞实测数据进行概率统计,得到闭环系统着陆控制精度统计量、雷达引导系统着陆控制精度统计量、差分卫导系统着陆控制精度统计量以及机载控制系统着陆控制精度统计量;步骤三、根据所述闭环系统着陆控制精度统计量、所述雷达引导系统着陆控制精度统计量、所述差分卫导系统着陆控制精度统计量以及所述机载控制系统着陆控制精度统计量进行无人机着陆控制精度评估。本申请能够实现小样本量下的无人机系统全自动着陆精度试飞评估,提高了着陆精度评估的全面性。
技术研发人员:孙国强,史贵超,苗延飞,代恒超
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!