基于改进人工鱼群算法的人机协作拆卸线平衡方法
本发明涉及一种人机协作拆卸线平衡方法,具体涉及一种基于改进人工鱼群算法的人机协作拆卸线平衡方法及其制备方法和应用。
背景技术:
1、拆卸是废旧产品回收再利用的首要关键环节,企业以流水线的生产方式将有价值的零部件进行拆卸回收再利用的过程中除了考虑生产效率、降低成本,还应该合理配置资源、减少能源消耗。
2、传统的手工拆卸线中通常采取人工手动拆卸,但这种方式拆卸效率低,劳动力成本高。相比之下机器人拆卸线则具备高生产率、低劳动力成本、长持续性等优势。除此之外,针对一些具有危险性的拆卸工作机器人能够替换人类去完成从而避免了安全问题。但是,由于机器人缺乏应对突发问题时的灵活处理能力和普适性以及技术层面上的原因等,目前机器人还不能完全性替代工人进行自动化作业。随着协作机器人的发展,通过人机交互技术,在废品拆卸过程中将机器人拆卸和手动拆卸的优点相结合的人机协同拆卸作业方式具有更高的灵活性和效率,拥有广阔的发展前景和市场需求。
3、传统拆卸线平衡问题(disassembly line balancing problem,dlbp)主要考虑线平衡过程中废旧产品各零部件之间的拆卸作业优先顺序关系以及拆卸线各工位间的作业负荷均衡程度,而人机协作拆卸线平衡问题在此基础上还需要考虑了拆卸操作者的任务分配、各工位操作者数量分配、以及操作者之间的协同作业方式等,因此人机协作拆卸线平衡问题相较于传统拆卸线平衡问题更为复杂。而目前的现有技术中主要围绕以提升拆卸效率、降低拆卸成本、提升拆卸过程中工人安全系数为优化重心进行研究,针对人机协作拆卸线平衡问题中特定属性零部件对应拆卸任务的操作者分配以及引入机器人时生产能耗的增加等问题鲜有涉及。
技术实现思路
1、本发明提供了一种解决能耗的人机协作拆卸线平衡问题,根据废旧产品各零部件的特征属性与拆卸操作者类型之间的映射特性,对不同特征属性零部件对应的拆卸任务分配不同的拆卸操作者,同时还解决协作机器人的引入造成的能耗增加问题的基于改进人工鱼群算法的人机协作拆卸线平衡方法,包括以下步骤:
2、1)以最小化工作站开启数量、最小化空闲时间均衡指标、最小化拆卸成本与最小化拆卸能耗为优化目标构建目标函数:
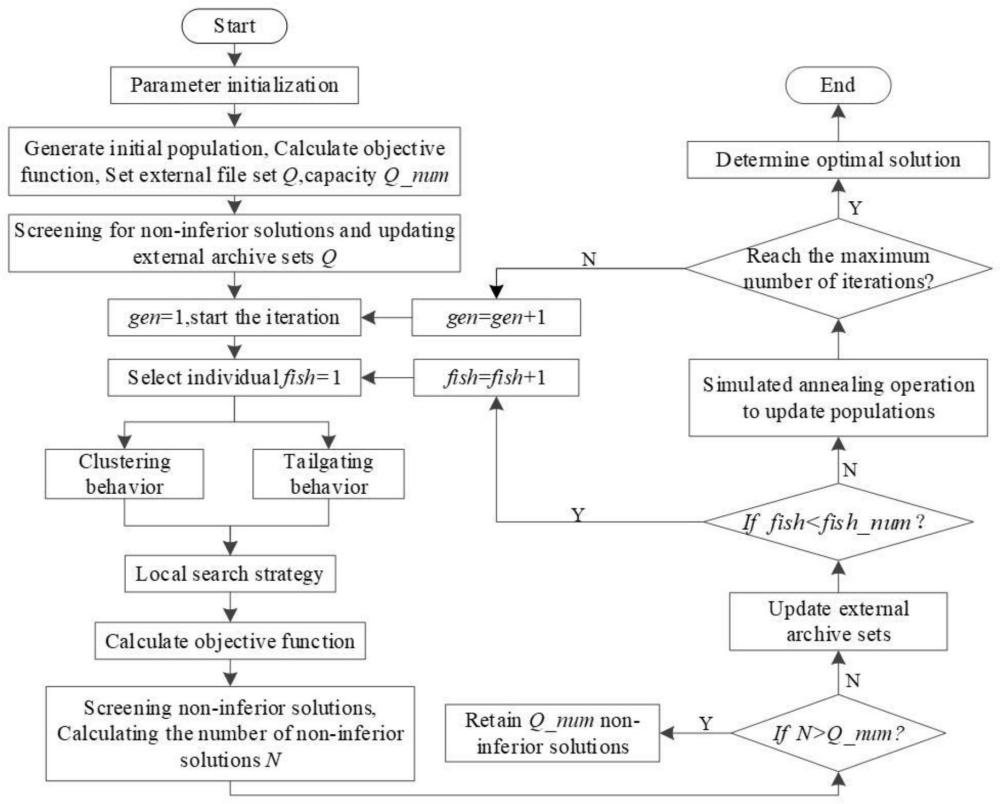
3、2)通过改进的人工鱼群算法求解最优解;
4、3)将拆卸任务序列分配到工作站,并确定开启的工作站分配的操作者类型;
5、4)根据成立的拆卸任务序列、开启的工作站、工作站分配的操作者类型完成对人机协作拆卸线的平衡优化配置。
6、优选地,1)中构建的目标函数为:
7、
8、
9、
10、minf4=ei+em+er+ef
11、
12、
13、
14、
15、约束条件:
16、
17、
18、
19、
20、
21、
22、
23、
24、
25、
26、
27、式(1)-(14)中,i:拆卸任务编号,i,j=1,2,…n;
28、k:工作站编号,k=1,2,…,k;
29、ct:工作站的生产节拍时间;
30、w:操作者类型,w=1,2;若操作者为工人,则w=1,若操作者为机器人,则w=2;
31、:任务i分配给操作者w拆卸时所需的作业时间;
32、hi:若拆卸任务i具有危害属性,则hi=1,否则hi=0;
33、di:若拆卸任务i具有再利用/再制造需求属性,则di=1,否则di=0;
34、ri:第i个拆卸任务的操作方向,拆卸任务的操作方向共6种:±x,±y,±z;
35、xikw:若任务i分配给工作站k中的操作者w,则xikw=1,否则xikw=0;
36、sk:若工作站开启,则sk=1,否则sk=0;
37、若操作者w分配给工作站k,则否则
38、ri:指拆卸序列第i个位置对应的拆卸任务操作方向的变动性,若ri≠ri-1,则ri=1否则ri=0;
39、pij:若拆卸任务i为拆卸任务j的紧前任务,则pij=1,否则pij=0,由此构造拆卸作业优先关系矩阵tp=(pij)n×n;
40、ck:开启一个人机协作拆卸工作站的固定成本;
41、cr:机器人的固定使用成本;
42、crt:机器人单位作业时间的拆卸成本;
43、cpt:工人单位作业时间的拆卸成本;
44、ei:机器人单位作业时间的拆卸能耗;
45、em:表示机器人单位时间的待机能耗;
46、er:表示机器人每次换向操作所需的能耗;
47、ef:其他能耗,包括工作站固定能耗、照明、及通风能耗;
48、针对目标函数:式(1)表示优化目标f1为开启工作站数目,为降低废旧产品的拆卸成本以及减少拆卸生产占地面积,应该尽可能减少人机协作拆卸生产线的工作站开启数量;
49、式(2)表示优化目标f2为最小化空闲时间均衡指标,为使各拆卸任务分配到工作站时各工作站的空闲时间尽可能少,同时使各工作站的空闲时间尽可能均衡;
50、式(3)表示优化目标f3为最小化拆卸成本,在满足拆卸条件下使拆卸成本最少,拆卸成本包括工人单位时间拆卸成本、机器人单位时间拆卸成本、开启工作站固定成本;
51、式(4)表示优化目标f4最小化拆卸能耗,在满足拆卸条件下拆卸能耗最少,拆卸能耗包括机器人单位时间拆卸能耗、机器人单位时间待机能耗、带拆卸产品转向能耗、工作站固定能耗;
52、针对约束条件:式(5)限定每项拆卸任务都需被分配到某一个工作站拆卸,且每个任务只能分配一次;
53、式(6)表示人机协作拆卸线工作站的开启数量应大于等于1且小于等于n;
54、式(7)与式(8)表示当工作站开启时需要拆卸任务分配,且工作站须按顺序开启;
55、式(9)表示开启的每个工作站只能有一个操作者;
56、式(10)与式(11)表示危害零件分配给机器人、有再利用/再制造需求的零部件分配给工人;
57、式(12)表示节拍约束,即分配至各工作站中的各项拆卸任务的作业时间之和不得超过生产节拍时间;
58、式(13)为拆卸任务间的作业优先顺序关系约束;
59、式(14)表示若任务i分配至工作站k且分配给操作者w,则操作者w必须分配至工作站k。
60、优选地,3)的具体步骤如下:
61、s1、输入拆卸任务序列,开启第一个工作站ws=1,记当前任务位置为k=1,记工作站剩余可分配时间rt,令rt=ct;
62、s2、提取第k个位置任务i的拆卸时间判断其拆卸时间是否大于rt,若是,令rt=ct,并开启新的工作站,ws=ws+1;否则,判断该任务拆卸操作对象与上一个已分配任务的拆卸操作对象是否相同,若相同则否则开启新的工作站,rt=ct;
63、s3、重复s1和s2,直至所有任务分配完毕,输出拆卸任务序列、开启的工作站、工作站分配的操作者类型。
64、优选地,2)中对人工鱼群算法进行以下改进:
65、2-1)在觅食行为中不设置人工鱼移动步长,在搜索过程中满足条件的人工鱼直接进行移动;
66、2-2)在聚群行为中引入拥挤距离机制通过计算解的拥挤度来筛选最优解;
67、2-3)对人工鱼群算法聚群行为和追尾行为寻优过程中产生的解设计加速算法的全局收敛的局部搜索策略;
68、2-4)将模拟退火操作融入算法种群更新阶段提升种群下一次迭代时的质量。
69、优选地,2-1)包括以下步骤:记录当前状态的人工鱼xprey,并将其设置为觅食行为的公告牌qprey;
70、对人工鱼a进行觅食行为尝试;
71、随机生成一条人工鱼x并计算其各个目标值函数,将x与a与进行非劣解比较;
72、记录当前状态人工鱼xprey并设置为觅食行为的公告牌qprey;进行觅食行为尝试随机生成一条人工鱼xrand计算其目标值与xprey进行非劣解比较,每进行一次随机生成人工鱼即完成一次觅食尝试;
73、若所求目标值函数比较结果xrand>xprey,则保留xrand作为新的qprey,同时选择当前xrand进行新的觅食尝试;若xrand<xprey则保持公告牌qprey不变;若xrand和xprey为互不支配的2个解,则都作为公告牌qprey保留,然后进行下一次尝试,直至执行ntry次尝试后,得到qprey为觅食后的可行解;若到达最大尝试次数后,qprey中非劣解仍保持xprey不变,则表明觅食行为失败,随机选择一种可行解作为觅食后xprey。
74、优选地,2-2)中,引入nsga-ii拥挤距离机制评价每个非劣解,将每个目标函数fd降序排列,其中d∈{1,2,…d},定义目标函数fd的最大值fd,k和最小值fd,1对应个体的拥挤距离l1=lg=∞,个体g的拥挤距离的公式如下:
75、
76、g∈{2,3,...k-1}……(33)
77、式中:d代表目标个数,k代表非劣解数量。
78、优选地,2-2)中包括以下步骤:
79、设有人工鱼x1=(a1,a2,…an,wa1,wa2,…wan),x2=(b1,b2,…bn,wb1,wb2,…wbn),定义两条人工鱼之间的距离计算为:
80、
81、式(35)中:sgn为0-1变量,表示x1与x2中的元素ai与bi的异同,n为拆卸任务数量;
82、设人工鱼视野为v,当d(x1,x2)≤v时,则称x2为x1在其视野范围内搜索到的一条人工鱼;
83、找到满足x1视野范围内的所有人工鱼个体集合xtotal,通过引入nsga-ii拥挤距离机制对xtotal进行排序,其中拥挤距离最大的个体作为该次聚群行为的中心鱼xcenter;
84、将xcenter与当前人工鱼x1进行非支配排序比较,若xcenter支配x1则替换x1,表明聚群成功;若不支配则聚群失败,执行觅食行为,若互不支配则将xcenter与x1都保存下来,聚群成功;
85、若x1视野范围内没有找到符合条件的人工鱼或者数量过多导致拥挤度过大即xtotal/xfish_num>δ,其中xfish_num为种群数量,δ为拥挤度,则表明聚群失败,执行觅食行为。
86、优选地,2-3)中包括以下步骤:对当前人工鱼xchase视野v范围内的n个人工鱼执行追尾操作;若n=0,当前视野内可追尾个体为0则表明追尾失败,执行觅食行为;若n≠0,记录视野中的n个人工鱼作为追尾行为的公告牌qchase,将当前人工鱼xchase置于公告牌中进行非支配排序,筛选出公告牌中的非劣解;若公告牌中只剩下xchase则追尾失败,执行觅食行为;若公告牌中除了xchase还存在n-1个非劣解且n/xfish_num≤δ,表明追尾成功,否则执行觅食行为。
87、优选地,2-3)中局部搜索策略如下:对人工鱼群算法聚群行为和追尾行为产生的解进行局部搜索,保持一个解的第一段拆卸任务序列编码不变的条件下,对其第二段拆卸操作者类型所对应的编码进行部分片段的互换从而生成一个新的解,然后通过对比改变前后的2个解选则较优的一个。
88、优选地,2-4)中包括以下步骤:
89、对鱼群算法产生种群中的每个个体fish_old通过模拟退火扰动产生新解fish_new,计算新解目标值函数,当fish_new支配fish_old时接受fish_new作为当前解,当fish_new不支配fish_old或者互不支配时则以一定概率接受fish_old作为当前解。接受概率公式p如下所示:
90、
91、式中:d为目标值函数个数,fd为对应目标函数值,t为当前迭代次数下的温度。
92、优选地,2-4)中模拟退火扰动如下:选择种群中一个个体fish,随机选择一个任务i,并找到任务i在第一段编码中的紧前任务的位置a1和紧后任务的位置b1以及任务i紧前任务和紧后任务在第二段编码中的对应位置;此时任务i可插入a1和b1之间任意位置,相应的把任务i第二段编码也插到对应的位置;此时任务a可插入a1和b1之间任意位置,然后把任务i所对应的0-1编码也插入第二段编码中相对应的位置;在随机插入之后,对于在a1和b1区间内的其他任务,在保证不改变危害零件和需求零件相应操作者匹配的前提下,将个体fish中代表不同类型操作者的第二段编码对应的数字标号0-1进行互换;在随机插入之后,针对a1和b1区间的普通任务也就是那些不具备危害属性和可利用和再制造属性零部件所对应的任务,通过变更其对应第二段编码中0-1编码来变更这些任务的拆卸操作者类型。
93、本发明具有以下有益效果:
94、1、本发明根据废旧产品各零部件的特征属性与拆卸操作者类型之间的映射特性,对不同特征属性零部件对应的拆卸任务分配不同的拆卸操作者,同时考虑到协作机器人的引入造成的能耗增加问题,构建了人机协作拆卸线平衡问题的函数,并利用人工鱼群算法求得最优解,从而能够实现最小化工作站开启数量、最小化空闲时间均衡指标、最小化拆卸成本与最小化拆卸能耗的人机协作拆卸线的平衡优化配置。
95、2、本发明中还提出了一种改进的人工鱼群算法,在所提算法中设计一种基于任务的分段式编码方式,在人工鱼群算法的聚群行为中引入拥挤距离机制对解进行拥挤度计算并排序,在其基础上依据解的特征设计了一种基于拆卸任务序列下改变其拆卸操作者类型的局部搜索策略,该策略能筛选出更好的解,提升了算法的收敛速度,在种群更新阶段时融入模拟退火操作以避免算法陷入局部最优,基于pareto解集思想筛选得到基于四个优化目标之间互不占优的一系列pareto非劣解,最后运用超体积(hyper-volume)指标[23]和反转世代距离(igd)指标来评价所得pareto非劣解集的质量。
- 还没有人留言评论。精彩留言会获得点赞!