一种飞行器姿态跟踪控制方法、系统及计算机设备
本发明属于刚体飞行器姿态控制,具体涉及一种飞行器姿态跟踪控制方法、系统及计算机设备。
背景技术:
1、随着技术的进步和应用需求的不断增长,飞行器空天任务日益复杂化和多样化,任务类型也由对地观测和通信中继等传统的单飞行器任务,逐渐发展为交会对接和编队飞行等新兴的多飞行器集群任务。对于各类飞行器而言,有效的姿态控制关系到飞行器起落和飞行动向等多种飞行过程,是保障各项空天任务顺利开展的重要基础。由于集群类任务中各飞行器间的相对距离较近,出于任务时间窗口和安全避碰等多方面考虑,既要重视姿态控制最终稳态目标的实现,更要关注运动过程中的收敛速度、超调量、轨迹边界等暂态性能。传统控制方法虽然可以通过改变参数来调整系统的暂态性能,但是由于在控制器设计过程中未考虑性能约束条件,因此对于暂态性能缺乏理论上的硬性保证,难以满足集群类空天任务中对于姿态控制安全性和可靠性的要求。
2、为了实现对超调量和收敛时间等暂态性能的先验约束,预设性能控制一种便捷有效并且被广泛使用的方法。但是,目前的飞行器预设性能姿态控制存在两个主要问题:(1)传统的指数型性能约束函数具有无法预设收敛时间、需要系统初始误差信息、收敛速度无法精细调节等局限性,现有的基于幂函数或双曲余切函数所设计的改进型性能约束函数虽然能解决前两项问题,但是由于采用的仍然是简单型函数,因此无法实现收敛速度的分阶段调节。这类函数均具有初始阶段收敛速度较快的特点,同时初始阶段的系统误差也较大,因此容易造成初始控制量激增和抖振等现象,进而引起闭环系统性能退化甚至失稳;(2)现有控制算法设计大多关注于理论推导结果,并且仿真测试均在计算资源充裕的高性能计算机上开展。但是实际机载飞控系统中的在线计算资源是十分有限的,由于大部分姿态控制算法在设计时并未考虑计算的轻量化处理,因此容易造成仿真测试性能和实际应用效果悬殊。
技术实现思路
1、为了解决计算资源受限情况下高性能和强实用的飞行器姿态跟踪控制的问题,本发明提供了一种飞行器姿态跟踪控制方法、系统及计算机设备,该方法基于复合型双曲余割复合函数开展指定时间预设性能姿态跟踪控制器设计,能够同时解决现有方法中的理论收敛时间无穷、初始状态信息依赖、收敛速度调节困难等问题;该方法基于sigmoid跟踪微分器获取反步设计中的虚拟控制指令导数信息,能够解决现有方法中解析求导所带来的控制器形式复杂和在线计算量剧增等问题。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种飞行器姿态跟踪控制方法,包括以下步骤:
4、获取飞行器运行参数;
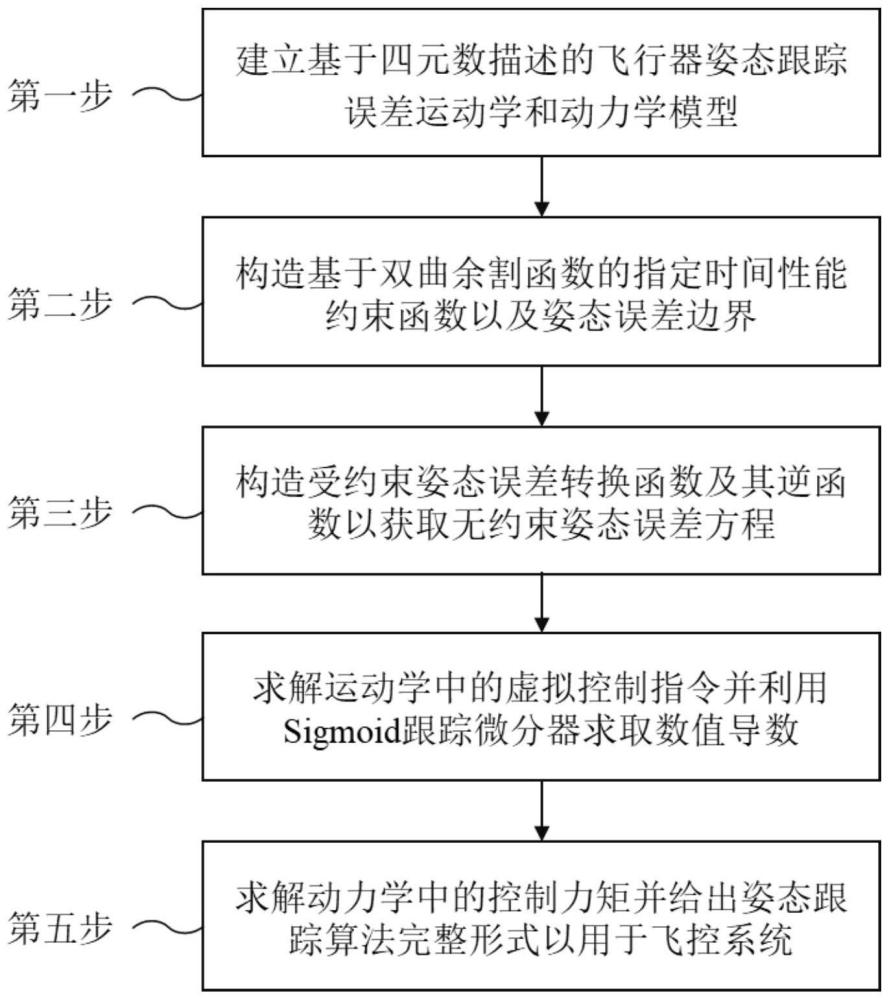
5、基于飞行器运行参数及四元数描述方式建立飞行器姿态跟踪误差的运动学模型和动力学模型;
6、基于双曲余割复合函数构造指定时间收敛的性能约束函数,基于性能约束函数设定姿态跟踪误差约束边界;
7、基于所述姿态跟踪误差约束边界构造受约束姿态误差转换函数,并求解受约束姿态误差转换函数的逆函数,获得无约束姿态跟踪转换误差的动态方程;
8、根据无约束姿态跟踪转换误差的动态方程及飞行器姿态跟踪误差的运动学模型,建立无约束转化误差的动态方程;
9、基于所述无约束转化误差的动态方程及反步法求解运动学模型中的虚拟控制指令,并构建sigmoid跟踪微分器对虚拟控制指令求取数值导数;
10、基于所述虚拟控制指令及数值导数设计控制力矩,在动力学模型中利用反步法求解实际控制输入量,并将控制力矩和实际控制输入量用于飞行器姿态跟踪系统,实现飞行器姿态跟踪控制。
11、优选地,所述飞行器姿态跟踪误差的运动学模型和动力学模型的具体构建方法为:
12、记fi为地球惯性系,fb为飞行器本体系,fd为期望运动坐标系,飞行器单体运动表示为fb相对于fi的运动,基于四元数描述的单体姿态运动学学模和动力学模型分别为:
13、
14、
15、其中,qb和分别是飞行器的姿态四元数和角速度,和分别是飞行器的姿态四元数和角速度的导数,jb是飞行器转动惯量,τb是控制力矩输入;
16、期望运动描述为fd相对于fi的运动,满足:
17、
18、其中,qd和分别是期望姿态和期望角速度;
19、飞行器跟踪运动描述为fb相对于fd的运动,基于公式(1)-(3),飞行器姿态跟踪误差的运动学模型和动力学模型分别建立为:
20、
21、
22、其中,是姿态跟踪误差四元数,qe0是四元数的标量部分,qe=[qe1,qe2,qe3]t是四元数的矢量部分,是角速度跟踪误差,jb是飞行器转动惯量,是飞行器角速度,和分别是期望角速度和角加速度,ce是旋转矩阵,τb是控制力矩。
23、优选地,所述基于双曲余割复合函数构造指定时间收敛的性能约束函数,基于性能约束函数设定姿态跟踪误差约束边界,具体为:
24、基于双曲余割复合函数,构造指定时间收敛的性能约束函数ρi(t):
25、
26、其中,t是时间变量,csch(·)是双曲余割复合函数,ti是所指定的收敛时间,ρi0用于调整边界函数初始点,ri用于调节函数收敛速度,ρi∞是误差的稳态上界;
27、基于性能约束函数,将姿态跟踪误差约束边界设计为:
28、
29、其中δi和为超调量限制参数,qei为姿态跟踪误差四元数中的对应分量。
30、优选地,所述基于所述姿态跟踪误差约束边界构造受约束姿态误差转换函数,并求解受约束姿态误差转换函数的逆函数,获得无约束姿态跟踪转换误差的动态方程,具体为:
31、基于姿态跟踪误差约束边界约束,构造受约束姿态误差转换函数,用于将受约束姿态跟踪误差转换为无约束形式,受约束姿态误差转换函数s(·)设计为:
32、
33、其中εi是无约束的转化误差,受约束实际姿态误差qei与无约束转化误差εi之间满足:
34、qei=ρis(εi), i=1,2,3 (9)
35、基于公式(9),求解受约束姿态误差转换函数的逆函数s-1(·)以给出转化误差的显式表达式:
36、
37、其中εi是转换误差,zi是归一化转化误差。
38、优选地,所述根据无约束姿态跟踪转换误差的动态方程及飞行器姿态跟踪误差的运动学模型,建立无约束转化误差的动态方程,具体为:
39、
40、其中ε=[ε1,ε2,ε3]t,是转换误差矢量,表示ε的导数;r=diag[r1,r2,r3],是三阶对角矩阵;v=[v1,v2,v3]t,s-1是误差转换函数的逆函数,ri是对角矩阵中的元素,qe是姿态乘法矩阵,qeo是四元数的标量部分,i3是三阶单位矩阵,是姿态叉乘矩阵,v是辅助矢量,vi是辅助矢量中的元素。
41、优选地,所述基于所述无约束转化误差的动态方程及反步法求解运动学回路的虚拟控制指令,并构建sigmoid跟踪微分器对虚拟控制指令求取数值导数,具体为:
42、基于所述无约束转化误差的动态方程,将运动学模型中的虚拟控制指令设计为:
43、
44、其中kp>0是控制参数,参数右上角的-1表示求逆;
45、构建基于sigmoid函数的跟踪微分器:
46、sig(x;a,b)=a[(1+e-bx)-1-0.5
47、其中sig(·)是sigmoid函数,a1,b1,a2,b2>0是设计参数,r>0是加速因子,w是参考信号输入,x1和x2是跟踪微分器的两个状态;
48、利用sigmoid跟踪微分器求取虚拟控制指令的导数:
49、
50、其中ri,ai1,ai2,bi1,bi2>0,ωecf=[ωec1,ωec2,ωec3]t和分别是虚拟控制指令的滤波信号和滤波导数,xωi是跟踪微分器的一个状态。
51、优选地,所述基于所述虚拟控制指令及数值导数设计控制力矩,在动力学模型中利用反步法求解实际控制输入量,并将控制力矩和实际控制输入量用于飞行器姿态跟踪系统,实现飞行器姿态跟踪控制,具体为:
52、基于所述虚拟控制指令及其滤波信号,定义角速度回路跟踪误差为zω=ωe-ωecf,其动态方程为:
53、
54、根据公式(16)及反步法原理,将控制力矩输入τb设计为:
55、
56、其中kd>0是控制参数,是辅助变量;
57、将控制力矩输入τb代入动力学模型得闭环动力学方程为:
58、
59、定义整体闭环系统的候选李雅普诺夫方程为:
60、
61、沿闭环系统轨迹对v求导可得
62、优选地,飞行器姿态跟踪控制器为:
63、
64、其中,xωi是跟踪微分器的一个状态,kd是控制参数,ξ是辅助变量。
65、本发明还提供一种飞行器姿态跟踪控制系统,包括:
66、数据采集模块,用于获取飞行器运行参数;
67、模型构建模块,用于基于飞行器运行参数及四元数描述方式建立飞行器姿态跟踪误差的运动学模型和动力学模型;
68、约束边界设定模块,用于基于双曲余割复合函数构造指定时间收敛的性能约束函数,基于性能约束函数设定姿态跟踪误差约束边界;
69、第一动态方程构建模型,用于基于所述姿态跟踪误差约束边界构造受约束姿态误差转换函数,并求解受约束姿态误差转换函数的逆函数,获得无约束姿态跟踪转换误差的动态方程;
70、第二动态方程构建模型,用于根据无约束姿态跟踪转换误差的动态方程及飞行器姿态跟踪误差的运动学模型,建立无约束转化误差的动态方程;
71、导数求解模块,用于基于所述无约束转化误差的动态方程及反步法求解运动学模型中的虚拟控制指令,并构建sigmoid跟踪微分器对虚拟控制指令求取数值导数;
72、跟踪模块,用于基于所述虚拟控制指令及数值导数设计控制力矩,在动力学模型中利用反步法求解实际控制输入量,并将控制力矩和实际控制输入量用于飞行器姿态跟踪系统,实现飞行器姿态跟踪控制。
73、本发明还提供一种计算机设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现所述飞行器姿态跟踪控制方法中任一项所述的步骤。
74、本发明提供的飞行器姿态跟踪控制方法具有以下有益效果:
75、本发明中的姿态跟踪算法基于预设性能方法进行设计,在控制器设计过程中预先施加性能约束条件,从理论上保证闭环系统暂态和稳态性能的可约束性与可调控性;构造基于复合双曲余割的性能约束函数,同时实现超调量与稳态误差的先验约束,收敛时间的预先指定以及收敛速度的精细调节,保证跟踪全过程的严格可控性与平稳可靠性;采用sigmoid跟踪微分器进行反步设计中的虚拟控制指令求导,实现控制算法的计算轻量化,保证其在机载飞控系统的实际应用性能。
- 还没有人留言评论。精彩留言会获得点赞!