一种基于电子阻力高位下拉器的最优鲁棒控制方法
本发明属于pid控制,具体涉及一种基于电子阻力高位下拉器的最优鲁棒控制方法。
背景技术:
1、高位下拉器中核心的结构为阻力控制系统,而阻力控制系统中核心元件为阻力源,它是在力量器械阻力控制系统中肌肉对抗的阻力产生装置,我国现阶段对于普通健身群众的力量器械,主要阻力源是配重块和机械杠杆结构的组合,阻力调节跨度大,调节不灵活,很难快速调节到合适大小,由于为单纯的机械结构,训练时会产生较大噪音,并且缺少急停和安全保护,在进行力量锻炼时很容易产生身体损伤。随着人们对体育健身有着越来越高的要求,健身器材的功能变得越来越多样化,其结构越来越复杂,功能也不再单一。因此,一种基于电子阻力可以进行精确且灵活调节的高位下拉器可以提高人们的健身效率和健身安全性。
2、基于电子阻力的高位下拉器取消传统铁块配重,采用电动方式通过电机和传动机构来模拟重力。电子阻力即控制系统通过电流控制永磁同步电机低速运转作为阻力应用在高位下拉器,通过控制电机的转矩、转速等参数进而调节阻力值的大小,从而提供不同的阻力水平。并且实现了更为自然和平滑的阻力调整,减少了机械结构带来的噪音和突变。
3、基于电子阻力高位下拉器的最优鲁棒控制方法采用pid控制方法,在电机运行过程中实行速度和电流双闭环pid控制。但传统pid控制器的性能高度依赖于参数的选择,而参数的调节通常需要经验和试错。对于复杂的系统和动态变化的工况,参数调节可能变得困难且耗时。
技术实现思路
1、本发明针对上述现有技术中存在的问题,提出一种基于电子阻力高位下拉器的最优鲁棒控制方法,在传统pid控制的基础上加入改进登山队算法优化pid参数,解决了传统pid控制方法的不稳定性和低响应性,该方法能够使高位下拉器具有稳定性和强鲁棒性的同时也兼顾安全性。
2、为实现上述目的,本发明采用了如下技术方案:
3、步骤一:搭建基于电子阻力高位下拉器的控制系统模型。
4、步骤二:构建改进登山队算法的模型。
5、步骤三:检测获取系统当前的转速值,并将当前转速值与期望转速值输入误差计算模块,得到转速误差值。
6、步骤四:将误差值输入到改进登山队算法模型中,算法进行迭代得到优化后的pid参数。
7、步骤五:控制系统应用优化后的pid参数实现整体速度和电流双闭环控制。
8、进一步的,所述步骤一控制系统模型包括误差计算模块、改进登山队算法模块、电流内环pid控制器模块、速度外环pid控制器模块、电流检测模块、转速检测模块、驱动电路模块、永磁同步电机模块。
9、进一步的,所述步骤二改进登山队算法,包括两部分:
10、s1、在算法的协作登山阶段加入自适应搜索因子w,避免算法陷入局部最优解,提高算法的全局搜索性能,如式(1)所示;
11、(1);
12、式中,t为当前迭代次数,t为最大迭代次数;
13、s2、在算法的灾害威胁阶段融入多方向游走策略,即算法寻优过程中在靠近最优解的同时在周围进行游走探索,提供更多的灵活性,使算法更能适应问题中的不确定性和变化,提高算法的鲁棒性。
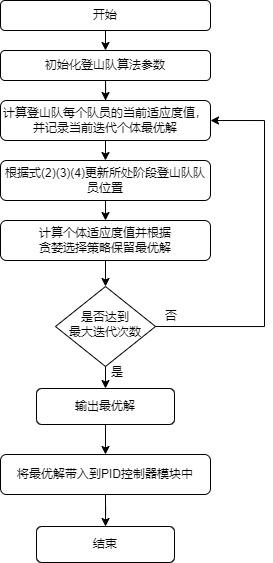
14、进一步的,所述步骤四,将误差值输入到改进登山队算法模型中,算法进行迭代得到优化后的pid参数,其特征在于,具体步骤为:
15、step1.参数初始化:设置种群规模n,最大迭代次数t,空间维度d,搜索上界ub,搜索下界lb;
16、step2.计算登山队每个队员的当前适应度值fitness,并记录当前迭代个体最优解,适应度函数公式为:
17、;
18、其中,e(t)表示时刻t的误差,也即控制系统实际输出与期望输出之间的差值,j为适应度值;
19、step3.在协作登山阶段,利用引入自适应搜索因子w的位置更新公式更新每个队员的位置:
20、(2);
21、其中,为第i个登山队队员新位置,为登山队队长位置,为受前面队员引导的其他队员位置,为第i 个登山队队员位置,w为自适应搜索因子,rand 为介于 0 和 1 之间的随机数;
22、在灾害威胁阶段,融入多方向游走策略的位置更新公式如下所示:
23、(3);
24、其中,为随机发生灾害情况下的登山队队员位置,其他参数意义同上;
25、在协调防御阶段,队员的位置更新公式如下所示:
26、(4);
27、其中,为所有登山队队员的平均位置,其他参数意义同上;
28、step4.用适应度函数计算个体适应度值,根据贪婪选择策略保留最优解,即若队员的候选位置的适应度比当前位置的适应度好,则放弃当前位置并更新为候选位置;
29、step5.判断当前迭代次数t是否达到最大迭代次数t,若是则停止寻优输出最优解,否则返回step2继续寻优;
30、step6.将最优解带入到pid控制器模块中,即赋值到kp, ki, kd三个参数,得到最佳数据情况下的模型输出结果,实现最优鲁棒性控制。
31、进一步的,所述步骤五速度和电流双闭环控制,其特征在于:即速度外环pid控制器模块接收转速误差值,并根据改进登山队算法模型输出值,更新pid参数,计算输出期望电流值;控制系统检测获取当前电流值,并将当前电流值与期望电流值输入下一误差计算模块,得到电流误差值;电流内环pid控制器接收电流误差值,并应用改进登山队算法模型优化后的pid参数进行计算并输出电机参考电流值到驱动电路模块,驱动电路模块输出三相交流电驱动永磁同步电机运转,进而实现控制系统整体速度和电流双闭环控制。
32、通过采用上述技术方案,本发明实现了以下有益效果:通过改进登山队算法,解决了基础登山队算法易陷入局部最优解的问题,同时提高了算法的收敛速度和鲁棒性。此外,通过在基于电子阻力高位下拉器的控制系统中采用改进登山队算法的pid双闭环控制,进一步提高了系统的控制性能和鲁棒性。
技术特征:
1.一种基于电子阻力高位下拉器的最优鲁棒控制方法,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的一种基于电子阻力高位下拉器的最优鲁棒控制方法,其特征在于:所述步骤一控制系统模型包括误差计算模块、改进登山队算法模块、电流内环pid控制器模块、速度外环pid控制器模块、电流检测模块、转速检测模块、驱动电路模块、永磁同步电机模块。
3.根据权利要求1所述的一种基于电子阻力高位下拉器的最优鲁棒控制方法,其特征在于:所述步骤五速度和电流双闭环控制,即速度外环pid控制器模块接收转速误差值,并根据改进登山队算法模型输出值,更新pid参数,计算输出期望电流值;控制系统检测获取当前电流值,并将当前电流值与期望电流值输入下一误差计算模块,得到电流误差值;电流内环pid控制器接收电流误差值,并应用改进登山队算法模型优化后的pid参数进行计算并输出电机参考电流值到驱动电路模块,驱动电路模块输出三相交流电驱动永磁同步电机运转,进而实现控制系统整体速度和电流双闭环控制。
技术总结
本发明公开了一种基于电子阻力高位下拉器的最优鲁棒控制方法,属于PID控制技术领域,其特征在于:基于电子阻力高位下拉器的控制系统通过引入基于改进登山队算法的PID控制器,实现PID控制器参数的自动优化调整;所述改进登山队算法通过引入自适应搜索因子和多方向游走策略,避免算法陷入局部最优解,提高算法的灵活性和适应性,进而提高基于电子阻力高位下拉器控制系统的性能。
技术研发人员:张玉璘,管峰保,张迪,丁启萌,李忠涛,曹旭,饶志鹏,李昂,弭吉越
受保护的技术使用者:济南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!