自主搬运机器人的平衡角确定方法、装置、机器人及介质
本发明涉及智慧物流,具体涉及一种自主搬运机器人的平衡角确定方法、装置、机器人及介质。
背景技术:
1、两轮机器人是一种自主移动机器人,具有两个轮子作为移动单元,通过电机的驱动实现机器人的前进、后退和转弯等动作。这种机器人在很多领域都有应用,如无人驾驶、物流运输、救援、医疗服务等。现有的两轮机器人平衡模型的建立均是基于倒立摆结构,倒立摆结构指的是质心在铰链上方的系统,其平衡控制相对简单,只需要考虑负重问题,让平衡车保持平衡,而且负重在正上方。但随着待运输货物种类、尺寸的变化,倒立摆模型不能满足要求,提出了双臂双轮搬运机器人,即:相比于倒立摆结构多了两个可以自由转动的臂架,通过自由转动的臂架实现对多种类待运输货物的运输。
2、但由于当自由转动的臂架夹取到待运输货物时,其重心偏移较大,需要调整臂架角度,使重心回到中心。现有技术对重心的控制主要基于pid(比例-积分-微分)控制器或类似的线性控制器,将重心调节到中心的时间长、调节不够准确。
3、亟须提供一种自主搬运机器人的平衡角确定方法、装置、机器人及介质,解决上述技术问题。
技术实现思路
1、有鉴于此,有必要提供一种自主搬运机器人的平衡角确定方法、装置、机器人及介质,用以解决现有技术中存在的无法快速、准确将双轮双臂自主搬运机器人的重心调节至目标位置的技术问题。
2、一方面,本发明提供了一种自主搬运机器人的平衡角确定方法,所述自主搬运机器人包括对称分布的两个搬运组件,所述搬运组件包括车轮,与所述车轮可转动连接的第一杆件以及与所述第一杆件可转动连接的第二杆件,所述第二杆件用于夹持待搬运物体,平衡角为所述第一杆件与预设坐标系的y轴的夹角,所述预设坐标系的原点为所述车轮的中心点,所述预设坐标系的x轴为与预设平面平行的方向,所述预设坐标系的y轴为与预设平面垂直的方向,所述预设平面为所述两个搬运组件的车轮所在平面;所述方法包括:
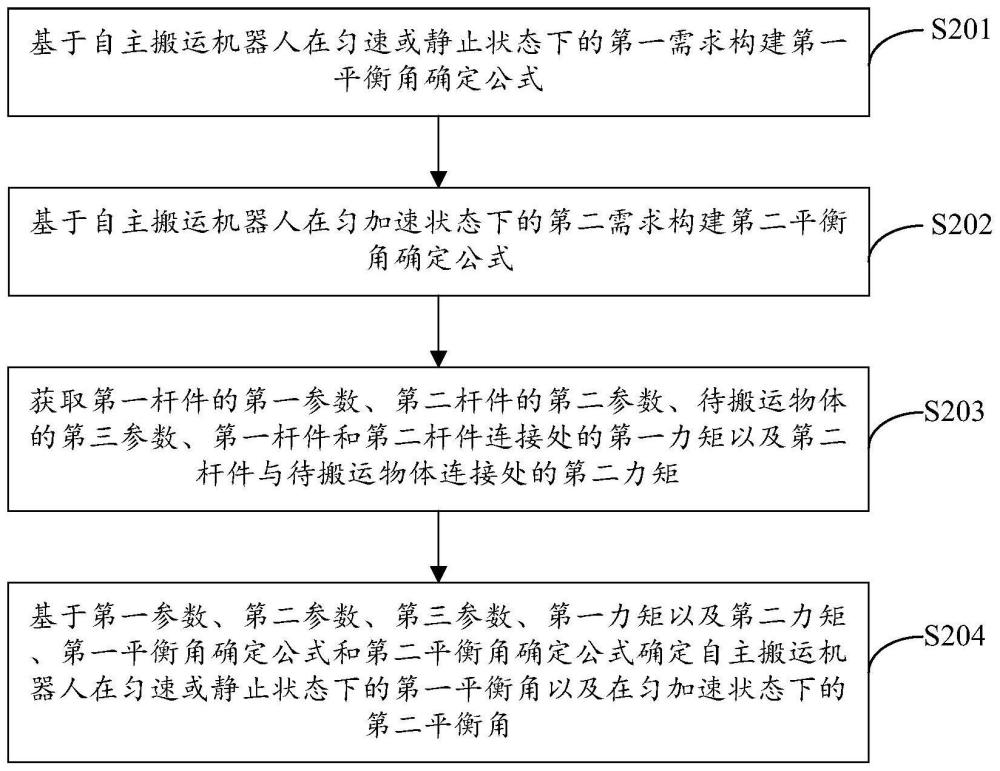
3、基于所述自主搬运机器人在匀速或静止状态下的第一需求构建第一平衡角确定公式;
4、基于所述自主搬运机器人在匀加速状态下的第二需求构建第二平衡角确定公式;
5、获取所述第一杆件的第一参数、所述第二杆件的第二参数、所述待搬运物体的第三参数、所述第一杆件和所述第二杆件连接处的第一力矩以及所述第二杆件与所述待搬运物体连接处的第二力矩;
6、基于所述第一参数、所述第二参数、所述第三参数、所述第一力矩以及所述第二力矩、所述第一平衡角确定公式和所述第二平衡角确定公式确定所述自主搬运机器人在匀速或静止状态下的第一平衡角以及在匀加速状态下的第二平衡角。
7、在一些可能的实现方式中,所述第一平衡角确定公式为:
8、sin2θcosα(m2gk2l1l2-m1gk1l1l2-m2gl1l2)+
9、sinθcosθsinα(m2gk2l1l2-m1gk1l1l2-m2gl1l2)+
10、sinθ(τ1l2cosα-τ1l1+τ2l1)+cosθτ1l2sinα=0
11、式中,θ为平衡角;α为第一杆件和第二杆件的夹角;m2为第二杆件的质量;g为重力加速度;k2为第一杆件质心位置的比例系数;l1为第一杆件的长度;l2为第二杆件的长度;m1为第一杆件的质量;k1为第一杆件质心位置的比例系数;τ1为第一力矩;τ2为第二力矩。
12、在一些可能的实现方式中,所述第二平衡角确定公式为:
13、[m1ak1l1cosθ+m2a(l1cosθ+k2l2sinβ)+m2g(k2l2cosβ-l1sinθ)
14、-m1gk1l1sinθ+τ2]×(gl2cosβ+al2sinβ)+(τ1-τ2-m2gk2l2cosβ
15、-m2ak2l2sinβ)×[a(l1cosθ+l2cosβ)+g(l2cosβ+l1sinθ)]=0
16、式中,θ为平衡角;a为匀加速度;β为第二杆件和x轴的夹角;α为第一杆件和第二杆件的夹角;m2为第二杆件的质量;g为重力加速度;k2为第一杆件质心位置的比例系数;l1为第一杆件的长度;l2为第二杆件的长度;m1为第一杆件的质量;k1为第一杆件质心位置的比例系数;τ1为第一力矩;τ2为第二力矩。
17、在一些可能的实现方式中,所述第一需求为所述第一杆件、所述第二杆件和所述待搬运物体的综合质心在所述y轴上,所述第二需求为所述第一杆件、所述第二杆件和所述待搬运物体对所述原点的力矩之和为零。
18、在一些可能的实现方式中,所述第一参数包括所述第一杆件的实际长度、所述第一杆件的实际质量、所述第一杆件的质心坐标以及所述第一杆件质心位置的实际比例系数,所述第二参数包括所述第二杆件的实际长度、所述第二杆件的实际质量、所述第二杆件与所述第一杆件的夹角、所述第二杆件的质心坐标以及所述第二杆件质心位置的实际比例系数,所述第三参数包括所述待搬运物体的质量以及所述待搬运物体的偏距。
19、在一些可能的实现方式中,所述方法还包括:
20、在仿真软件中构建所述自主搬运机器人的机器人仿真模型;
21、基于所述第一参数、所述第二参数、所述第三参数、所述第一力矩、所述第二力矩以及所述第一平衡角确定所述机器人仿真模型的仿真质心x轴坐标;
22、基于所述第一参数、所述第二参数、所述第三参数、所述第一力矩、所述第二力矩以及所述第二平衡角确定所述机器人仿真模型的在所述原点处的仿真总力矩;
23、基于所述仿真质心x轴坐标和所述仿真总力矩分别确定所述第一平衡角确定公式和所述第二平衡角确定公式是否准确。
24、在一些可能的实现方式中,所述基于所述仿真质心x轴坐标和所述仿真总力矩分别确定所述第一平衡角确定公式和所述第二平衡角确定公式是否准确,包括:
25、确定所述仿真质心x轴坐标与预设坐标的差值是否小于或等于第一阈值差值;
26、当所述仿真质心x轴坐标与预设坐标的差值小于或等于第一阈值差值时,所述第一平衡角确定公式准确;
27、确定所述仿真总力矩与预设力矩的差值是否小于或等于第二阈值差值;
28、当所述仿真总力矩与预设力矩的差值小于或等于第二阈值差值时,所述第二平衡角确定公式准确。
29、另一方面,本发明还提供了一种自主搬运机器人的平衡角确定装置,所述自主搬运机器人包括对称分布的两个搬运组件,所述搬运组件包括车轮,与所述车轮可转动连接的第一杆件以及与所述第一杆件可转动连接的第二杆件,所述第二杆件用于夹持待搬运物体,平衡角为所述第一杆件与预设坐标系的y轴的夹角,所述预设坐标系的原点为所述车轮的中心点,所述预设坐标系的x轴为与预设平面平行的方向,所述预设坐标系的y轴为与预设平面垂直的方向,所述预设平面为所述两个搬运组件的车轮所在平面;所述装置包括:
30、第一平衡角公式构建单元,用于基于所述自主搬运机器人在匀速或静止状态下的第一需求构建第一平衡角确定公式;
31、第二平衡角公式构建单元,用于基于所述自主搬运机器人在匀加速状态下的第二需求构建第二平衡角确定公式;
32、参数获取单元,用于获取所述第一杆件的第一参数、所述第二杆件的第二参数、所述待搬运物体的第三参数、所述第一杆件和所述第二杆件连接处的第一力矩以及所述第二杆件与所述待搬运物体连接处的第二力矩;
33、平衡角确定单元,用于基于所述第一参数、所述第二参数、所述第三参数、所述第一力矩以及所述第二力矩、所述第一平衡角确定公式和所述第二平衡角确定公式确定所述自主搬运机器人在匀速或静止状态下的第一平衡角以及在匀加速状态下的第二平衡角。
34、另一方面,本发明还提供了一种搬运机器人,包括存储器和处理器,其中,
35、所述存储器,用于存储程序;
36、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任意一种可能的实现方式中所述的自主搬运机器人的平衡角确定方法中的步骤。
37、另一方面,本发明还提供了一种计算机可读存储介质,所述可读存储介质上存储有程序或指令,所述程序或指令被处理器执行时以实现上述任意一种可能的实现方式中所述的自主搬运机器人的平衡角确定方法中的步骤。
38、采用上述实现方式的有益效果是:本发明提供的自主搬运机器人的平衡角确定方法,首先构建自主搬运机器人在匀速或静止状态下的第一平衡角确定公式以及其在匀加速状态下的第二平衡角确定公式,可通过构建出的第一平衡角确定公式和第二平衡角确定公式确定出第一平衡角和第二平衡角,然后直接将平衡角对应调整至第一平衡角和第二平衡角即可实现对自主搬运机器人的重心调节,缩短了调节过程,且第一平衡角和第二平衡角具有理论依据,确保了平衡角调节的准确性。
- 还没有人留言评论。精彩留言会获得点赞!