基于空地协同的地图构建方法、装置、设备和存储介质与流程
本技术属于计算机,尤其涉及一种基于空地协同的地图构建方法、装置、设备和存储介质。
背景技术:
1、基于空地协同的地图建构是一种通过利用飞行器、机器人或其他移动传感器设备,实现对三维空间和表面的数值化建模的方法。其核心思想是将设备获取的空中和地面的三维数据进行高效的数据融合和处理,生成高质量、高精度、全面的地图,并实现机器的自主路径规划和决策。
2、应用飞行器、机器人或其他移动传感器设备进行自主探索时,需要通过传感器感知环境信息并构建地图。现有的移动机器人自主探索方式为基于边界理论的自主探索,其主要原理为:根据现有的空间环境信息来尽可能多的获得未知环境的信息,引导机器人向已探索和未探索的区域交界运动,从而高效的获得更多的环境信息。
3、然而,现有的自主探索方法在检索边界的时候,会处理整个地图,导致在大规模的场景下以及在频率较高的规划时,导致其运算量大;且现有技术基于图像提取信息台粗糙,不能进行更精确的决定,导致检测结果不准确的缺陷。
技术实现思路
1、本技术提供一种基于空地协同的地图构建方法、装置、设备和存储介质,用以解决现有技术中存在的运算量大、且存在检测误差的缺陷。
2、第一方面,本技术提供一种基于空地协同的地图构建方法,该方法包括:
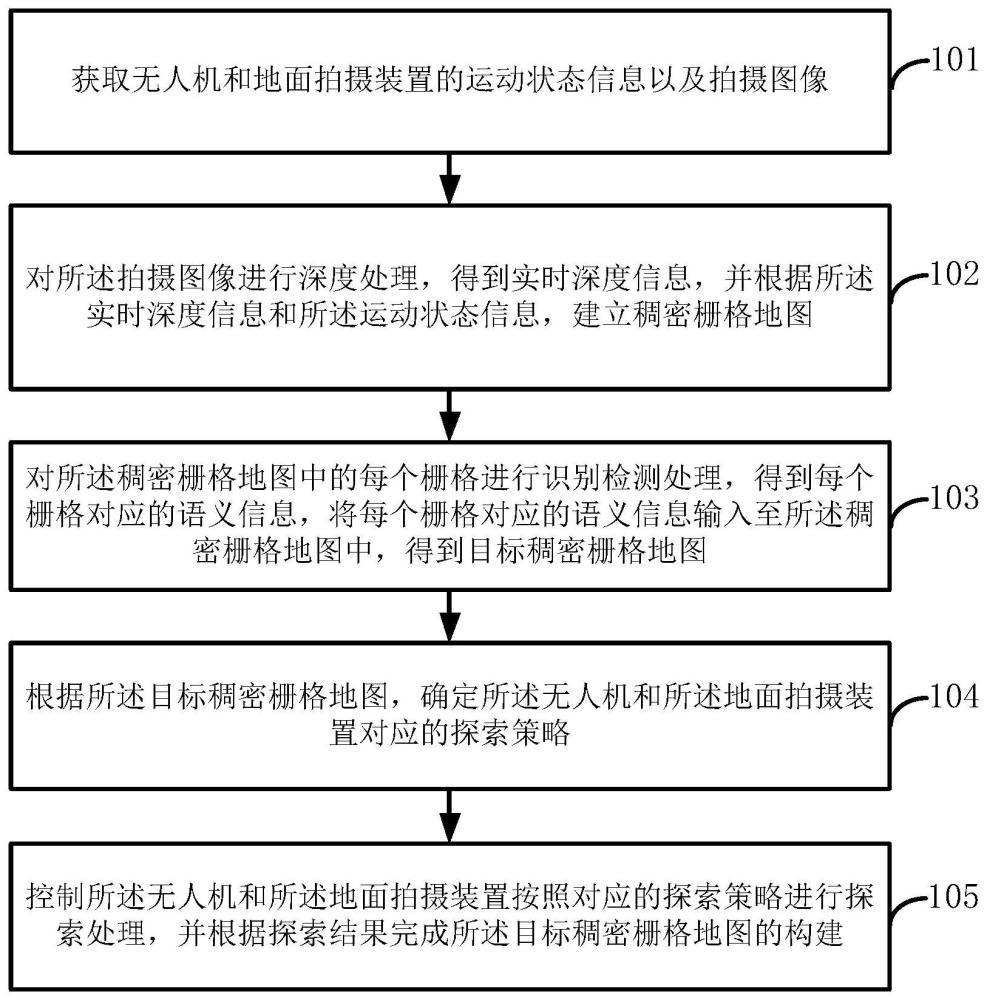
3、获取无人机和地面拍摄装置的运动状态信息以及拍摄图像;
4、对所述拍摄图像进行深度处理,得到实时深度信息,并根据所述实时深度信息和所述运动状态信息,建立稠密栅格地图;
5、对所述稠密栅格地图中的每个栅格进行识别检测处理,得到每个栅格对应的语义信息,将每个栅格对应的语义信息输入至所述稠密栅格地图中,得到目标稠密栅格地图;
6、根据所述目标稠密栅格地图,确定所述无人机和所述地面拍摄装置对应的探索策略,所述探索策略用于指示起始探索位置、对应的探索路线以及探索汇合点;
7、控制所述无人机和所述地面拍摄装置按照对应的探索策略进行探索处理,并根据探索结果完成所述目标稠密栅格地图的构建。
8、可选的,所述对所述稠密栅格地图中的每个栅格进行识别检测处理,得到每个栅格对应的语义信息,包括:
9、对所述稠密栅格地图进行分割处理,得到多个子栅格区域;
10、针对多个子栅格区域,采用目标识别检测算法对每个子栅格区域内的目标物体进行识别检测处理,得到每个子栅格区域对应的目标物体的检测框,所述检测框用于指示所述目标物体的位置信息以及所述目标物体的语义信息;
11、根据所述目标物体的检测框,为每个检测框包括的栅格赋予所述目标物体的语义信息,得到每个栅格对应的语义信息。
12、可选的,所述探索策略包括:汇合阶段以及独立探索阶段,所述根据所述目标稠密栅格地图,确定所述无人机和所述地面拍摄装置对应的探索策略,包括:
13、根据所述目标稠密栅格地图,确定所述无人机和所述地面拍摄装置在汇合阶段内的探索汇合点,所述探索汇合点用于使所述无人机和所述地面拍摄装置上报探索到的地图数据;
14、根据所述目标稠密栅格地图中的每个栅格对应的语义信息,确定待探索区域的边界信息;
15、根据所述边界信息,确定所述无人机和所述地面拍摄装置处于独立探索阶段时的起始探索位置、多个观察视点以及到达所述起始探索位置和所述探索汇合点的探索时刻;
16、根据多个观察视点,分别确定所述无人机和所述地面拍摄装置的探索路线,并根据所述起始探索位置、探索路线、探索汇合点以及到达所述起始探索位置和所述探索汇合点的探索时刻,生成对应的探索策略,其中,所述无人机的探索路线与所述地面拍摄装置的探索路线不同。
17、可选的,所述方法还包括:在所述无人机和所述地面拍摄装置探索完成,且位于所述探索汇合点时,控制所述无人机和所述地面拍摄装置向主拍摄装置发送对应的探索数据,以使所述主拍摄装置根据获取到的探索数据,对所述目标稠密栅格地图进行更新处理。
18、可选的,若在独立探索阶段存在至少两个地面拍摄装置的探索策略冲突,则控制第一地面拍摄装置继续按照对应的探索策略进行探索,并为第二地面拍摄装置分配新的探索策略,以使所述第二地面拍摄装置按照所述新的探索策略进行探索处理。
19、第二方面,本技术提供一种基于空地协同的地图构建装置,所述装置包括:
20、获取模块,用于获取无人机和地面拍摄装置的运动状态信息以及拍摄图像;
21、处理模块,用于对所述拍摄图像进行深度处理,得到实时深度信息,并根据所述实时深度信息和所述运动状态信息,建立稠密栅格地图;
22、所述处理模块,还用于对所述稠密栅格地图中的每个栅格进行识别检测处理,得到每个栅格对应的语义信息,将每个栅格对应的语义信息输入至所述稠密栅格地图中,得到目标稠密栅格地图;
23、确定模块,用于根据所述目标稠密栅格地图,确定所述无人机和所述地面拍摄装置对应的探索策略,所述探索策略用于指示起始探索位置、对应的探索路线以及探索汇合点;
24、控制模块,用于控制所述无人机和所述地面拍摄装置按照对应的探索策略进行探索处理,并根据探索结果完成所述目标稠密栅格地图的构建。
25、可选的,所述处理模块,用于对所述稠密栅格地图进行分割处理,得到多个子栅格区域;
26、所述处理模块,还用于针对多个子栅格区域,采用目标识别检测算法对每个子栅格区域内的目标物体进行识别检测处理,得到每个子栅格区域对应的目标物体的检测框,所述检测框用于指示所述目标物体的位置信息以及所述目标物体的语义信息;
27、所述处理模块,还用于根据所述目标物体的检测框,为每个检测框包括的栅格赋予所述目标物体的语义信息,得到每个栅格对应的语义信息。
28、可选的,所述确定模块,用于根据所述目标稠密栅格地图,确定所述无人机和所述地面拍摄装置在汇合阶段内的探索汇合点,所述探索汇合点用于使所述无人机和所述地面拍摄装置上报探索到的地图数据;
29、所述确定模块,还用于根据所述目标稠密栅格地图中的每个栅格对应的语义信息,确定待探索区域的边界信息;
30、所述确定模块,还用于根据所述边界信息,确定所述无人机和所述地面拍摄装置处于独立探索阶段时的起始探索位置、多个观察视点以及到达所述起始探索位置和所述探索汇合点的探索时刻;
31、所述确定模块,还用于根据多个观察视点,分别确定所述无人机和所述地面拍摄装置的探索路线,并根据所述起始探索位置、探索路线、探索汇合点以及到达所述起始探索位置和所述探索汇合点的探索时刻,生成对应的探索策略,其中,所述无人机的探索路线与所述地面拍摄装置的探索路线不同。
32、可选的,所述控制模块,用于在所述无人机和所述地面拍摄装置探索完成,且位于所述探索汇合点时,控制所述无人机和所述地面拍摄装置向主拍摄装置发送对应的探索数据,以使所述主拍摄装置根据获取到的探索数据,对所述目标稠密栅格地图进行更新处理。
33、可选的,所述控制模块,用于若在独立探索阶段存在至少两个地面拍摄装置的探索策略冲突,则控制第一地面拍摄装置继续按照对应的探索策略进行探索,并为第二地面拍摄装置分配新的探索策略,以使所述第二地面拍摄装置按照所述新的探索策略进行探索处理。
34、第三方面,本技术提供一种基于空地协同的地图构建设备,包括:
35、存储器;
36、处理器;
37、其中,所述存储器存储计算机执行指令;
38、所述处理器执行所述存储器存储的计算机执行指令,以实现如上述第一方面和第一方面各种可能的实现方式所述的基于空地协同的地图构建的方法。
39、第四方面,本技术提供一种计算机存储介质,其上存储有计算机程序,所述计算机程序被处理器执行以实现如上述第一方面及第一方面各种可能的实现方式所述的基于空地协同的地图构建的方法。
40、本技术提供一种基于空地协同的地图构建方法、装置、设备和存储介质。该方法通过获取无人机和地面拍摄装置的运动状态信息以及拍摄图像;对所述拍摄图像进行深度处理,得到实时深度信息,并根据所述实时深度信息和所述运动状态信息,建立稠密栅格地图;对所述栅格稠密地图进行识别检测处理得到目标稠密栅格地图;根据所述目标稠密栅格地图确定所述无人机和所述地面拍摄装置对应的探索策略,控制所述无人机和所述地面拍摄装置按照对应的探索策略进行探索处理,并根据探索结果完成所述目标稠密栅格地图的构建。避免忽略语义信息的探索造成的探索不精的情况,提高了未知环境的探索完整性,并且提高了探索的精度。
- 还没有人留言评论。精彩留言会获得点赞!