输电线路环水保监测的多轴舵机云台及云台智能控制方法与流程
本技术涉及环水保监测,更具体地说,是涉及一种输电线路环水保监测的多轴舵机云台及云台智能控制方法。
背景技术:
1、输变电线路工程在施工建设和使用的过程中,在塔基开挖、施工道路的修建、材料堆放、弃渣、房屋拆迁等施工过程会对周边植物、地貌等产生扰动,这些施工过程可能会造成地形改变、地表裸露等,在外动力的作用下会造成严重的水土流失。在施工过程中对控水土流失情况以及水土保持措施的成效就成了工程建设过程中的重中之重。传统的监测水土流失情况以及监督水土保持措施的实施(又称环水保监测)都是采用人工的方式进行。因为输变电工程建设环境大都在山区,地理环境非常险恶,监测是非常危险、费时费力、效率低,并且误差很大,更不能适应环水保监测的自动化、快速发展的趋势。如今,随着无人机的发展,可以利用无人机巡检航拍,再对航拍图片中的标的物进行识别和监测的方式。这种方式大大降低了人工巡检的危险性。
2、由于环水保监测的环境常常是在野外或者山区进行,并且还需要对输电线路对应的环境进行图像采集,因此对无人机和云台的控制提出了更高的要求。专利cn116012741b(申请号:cn202310260830.7)提供了一种高压输电线路水土流失监测系统,通过图像配准模块对预处理后的监测图像序列进行特征提取,采用混沌博弈优化算法对相邻的两张监测图像进行最优特征点匹配,进而实现对监测图像的定位,提高了高压输电线路水土流失监测系统对图像进行识别时的效果。但是,专利cn116012741b中的图像在处理时往往需要得到拍摄角度、拍摄位置相同的监测图像,目前为了得到拍摄角度、拍摄位置相同的监测图像时,只能依靠人工去控制无人机在接近的位置采集环水保监测图像,人工控制无人机进行监测图像采集的效果较差,导致无人机对环水保监测效果受到了影响。
技术实现思路
1、本技术的目的是提供一种输电线路环水保监测的多轴舵机云台及云台智能控制方法,解决了人工控制采集环水保监测图像的操作复杂、稳定性差的技术问题,达到了自动控制采集环水保监测图像、提高了环水保监测图像采集的稳定性的技术效果。
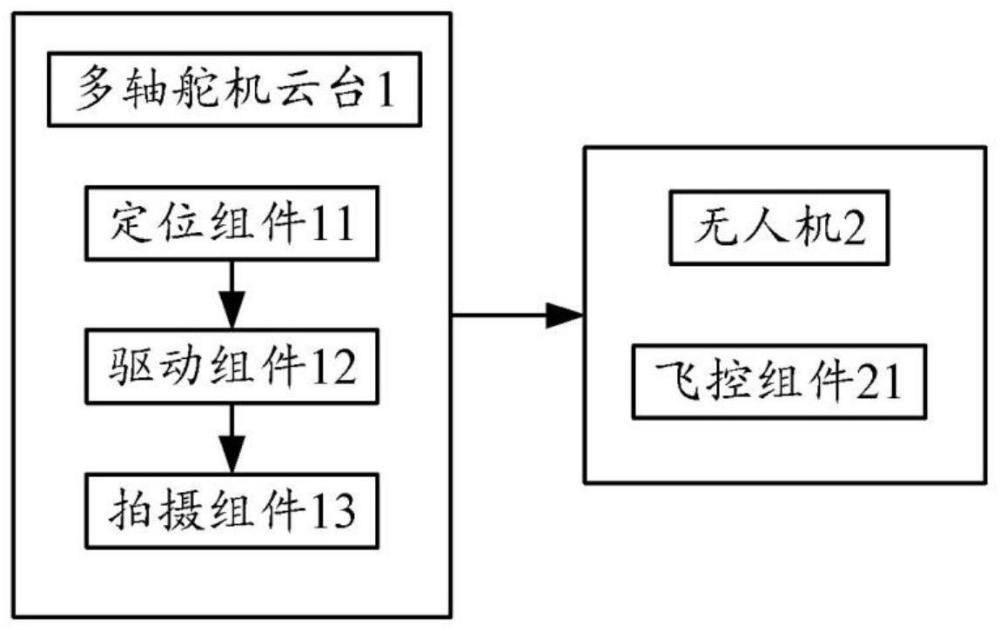
2、本技术实施例提供的一种输电线路环水保监测的多轴舵机云台,多轴舵机云台包括定位组件、驱动组件和拍摄组件,定位组件分别和驱动组件、拍摄组件电连接,定位组件用于在拍摄组件拍摄的实时图像中确定目标位置和调整方位角,目标位置和调整方位角对应实时图像中目标区域的历史图像的拍摄位置和拍摄角度,并将目标位置传递至无人机的飞控组件,以控制无人机飞行至目标位置,驱动组件驱动拍摄组件转动调整方位角进行拍摄。
3、在一种可能的实现方式中,通过历史图像的边界特征和实时图像的匹配确定目标位置,通过历史图像的地物分布特征和实时图像的地物分布特征确定调整方位角。
4、在另一种可能的实现方式中,定位组件包括存储单元和标签识别单元,存储单元用于存储历史图像和/或历史遥感数据,在历史图像和/或历史遥感数据上有位置标签和方位角标签时,标签识别单元用于根据位置标签确定目标位置,并根据方位角标签确定调整方位角;其中,位置标签包括gps信息,方位角标签包括多轴舵机云台的每个舵机的方位角。
5、在另一种可能的实现方式中,定位组件还包括神经网络单元,在历史图像和历史遥感数据上没有位置标签和方位角标签时,通过神经网络单元在拍摄组件拍摄的实时图像中确定拍摄目标区域的历史图像时无人机对应的目标位置和拍摄组件对应的调整方位角。
6、本技术实施例还提供了一种云台智能控制方法,用于对上述的的输电线路环水保监测的多轴舵机云台进行控制,该云台智能控制方法包括:在拍摄组件拍摄的实时图像中确定目标位置和调整方位角,目标位置和调整方位角对应实时图像中拍摄目标区域的历史图像的拍摄位置和拍摄角度;将目标位置传递至无人机的飞控组件,驱动组件驱动拍摄组件转动调整方位角,并通过拍摄组件拍摄目标位置和调整方位角对应的目标图像。
7、在另一种可能的实现方式中,在拍摄组件拍摄的实时图像中确定拍摄目标区域的历史图像时无人机对应的目标位置和拍摄组件对应的调整方位角,包括:通过历史图像的边界特征和实时图像的匹配确定目标位置,通过历史图像的地物分布特征和实时图像的地物分布特征确定调整方位角。
8、在另一种可能的实现方式中,方法还包括:在历史图像和/或历史遥感数据上有位置标签和方位角标签时,根据位置标签确定目标位置,并根据方位角标签确定调整方位角,并通过拍摄组件拍摄目标位置和调整方位角对应的目标图像;在历史图像和/或历史遥感数据上没有位置标签和方位角标签时,通过第一神经网络单元根据历史图像的边界特征和实时图像的匹配确定目标位置,并通过第一神经网络单元根据历史图像的地物分布特征和实时图像的地物分布特征确定调整方位角。
9、在另一种可能的实现方式中,方法还包括:驱动拍摄组件转动到不同的第一方位角,获取拍摄组件拍摄的多个第一图像;其中,一个第一方位角对应一张第一图像;通过第二神经网络单元确定第一图像对应区域的第一历史遥感数据;通过第三神经网络单元根据第一图像和第一历史遥感数据在每个第一图像中确定一个或多个第一兴趣区域,并根据多个第一图像中的所有第一兴趣区域确定无人机的第一目标位置和第一调整方位角;将第一目标位置传递至无人机的飞控组件,驱动组件驱动拍摄组件调整到第一调整方位角,并通过拍摄组件拍摄第一目标位置和第一调整方位角对应的第一目标图像。
10、在另一种可能的实现方式中,方法还包括:通过第四神经网络单元根据每个第一图像中的所有第一兴趣区域确定无人机的第二目标位置和第二调整方位角;将第二目标位置传递至无人机的飞控组件,驱动组件驱动拍摄组件调整到第二调整方位角,并通过拍摄组件拍摄第二目标位置和第二调整方位角对应的第二目标图像。
11、在另一种可能的实现方式中,通过第三神经网络单元根据第一图像和第一遥感数据在每个第一图像中确定一个或多个第一兴趣区域,包括:通过第三神经网络单元根据第一图像中的地物种类、地物形状、拍摄第一图像时的时间、拍摄第一图像时的地域特征和第一遥感数据中的地物的光谱特征,确定一个或多个第一兴趣区域。
12、在另一种可能的实现方式中,方法还包括:当通过第三神经网络单元确定第一图像中的所有第一兴趣区域包括施工扰动区域、截/排水沟区域、密目网苫盖区域或通道内待拆迁房屋区域时,通过第四神经网络单元根据每个第一图像中的所有第一兴趣区域确定无人机的第二目标位置和第二调整方位角。
13、在另一种可能的实现方式中,方法还包括:在获取多个第二目标图像之后,对目标图像、所有的第二目标图像根据目标图像对应的目标位置、每个第二目标图像对应的第二目标位置进行拼接,得到第三目标图像;将第三目标图像传输到地面纠偏终端,并接收地面纠偏终端传输的第三目标位置和第三调整方位角;将第三目标位置传递至无人机的飞控组件,驱动组件驱动拍摄组件调整到第三调整方位角,并通过拍摄组件拍摄第三目标位置和第三调整方位角对应的第四目标图像。
14、本技术实施例与现有技术相比存在的有益效果是:
15、本技术实施例提供了一种输电线路环水保监测的多轴舵机云台,该多轴舵机云台包括定位组件、驱动组件和拍摄组件,定位组件分别和驱动组件、拍摄组件电连接,定位组件用于在拍摄组件拍摄的实时图像中确定目标位置和调整方位角,目标位置和调整方位角对应实时图像中拍摄目标区域的历史图像的拍摄位置和拍摄角度,以控制无人机飞行至目标位置,驱动组件驱动拍摄组件按照调整方位角转动后进行拍摄。本技术实施例能够根据环水保监测的历史图像识别拍摄历史图像时的位置和方位角,进而控制无人机在相应的位置和方位角进行拍摄,避免了在其他位置拍摄监测图像时的障碍物遮挡,提高了环水保监测中的效率和精度。
- 还没有人留言评论。精彩留言会获得点赞!