笼养鸡舍内巡检导航方法、系统、移动机器人及存储介质
本发明涉及一种笼养鸡舍内巡检导航方法、清扫导航控制系统及介质导航。属于畜禽养殖装备自动化。
背景技术:
1、中国是农业大国,规模化笼养家禽养殖技术和舍内农用技术装备的快速发展催生了舍内自主移动机器人的诞生,其中承担舍内巡检功能的移动机器人的发展较为迅猛。
2、舍内巡检机器人以其行动灵活、对环境适应性强、可替代人工巡检方式,具有获取舍内全环境分布式信息和某一特殊位置的具体信息的能力,目前笼养禽舍巡检机器人在实际运用中面临着较多问题,例如:
3、1)舍内移动机器人巡检路径规划问题,由于鸡舍环境属于结构化场景,因此巡检路径通常固定,且由于鸡舍面积较大,意味着巡检过程中的路径规划问题不同于一般搜寻最优路径的问题,例如:粒子群算法、遗传算法、人工神经网络法等,目前较少有针对笼养鸡舍环境内巡检机器人的路径规划方法的提出,现有方法也面临着一些实际控制算法问题。
4、2)舍内移动机器人对于初始位姿确定的问题。在舍内环境中,基于惯性器件的航迹推算法往往对起始点的位置与姿态信息的获取要求较高,而在机器人巡检一轮后因为累计误差的存在而失去初始位姿信息,在进入下一次巡检任务后因为与原起始点位姿偏差较大而逐渐偏离原行驶路线的问题,导致无法进行长时间、多轮巡检。
5、3)舍内移动机器人对笼养鸡舍环境中的固定路线的巡检方法,包含路径跟踪问题、多传感器融合测距的问题以及面对多类型障碍物避障算法的问题。在舍内环境中,移动机器人因为作业空间有限,静态障碍物如鸡笼密布、料线、料槽众多、进入过道喂料槽所占空间狭窄,动态障碍物如饲养人员混杂其中,而对于这些多类型障碍物,使得对于多传感器的测距准确度和融合算法有极高的要求,这些问题常常会导致巡检机器人出现无法正常巡检。
技术实现思路
1、有鉴于此,本发明提供了一种笼养鸡舍内巡检导航方法、系统、移动机器人及存储介质,其实现了在环境复杂度较高的笼养鸡舍内稳定的巡检路径跟踪与避障功能;同时,利用移动机器人的传感器装置,补偿了起始位姿矫正的问题,进而解决了多次巡检后可能出现的移动机器人偏离原行驶路径问题,实现了移动机器人在舍内面对多类型障碍物时的巡检导航任务。
2、本发明的第一个目的在于提供一种笼养鸡舍内巡检导航方法。
3、本发明的第二个目的在于提供一种笼养鸡舍内巡检导航系统。
4、本发明的第三个目的在于提供一种移动机器人。
5、本发明的第四个目的在于提供一种计算机可读存储介质。
6、本发明的第一个目的可以通过采取如下技术方案达到:
7、一种笼养鸡舍内巡检导航方法,所述方法包括:
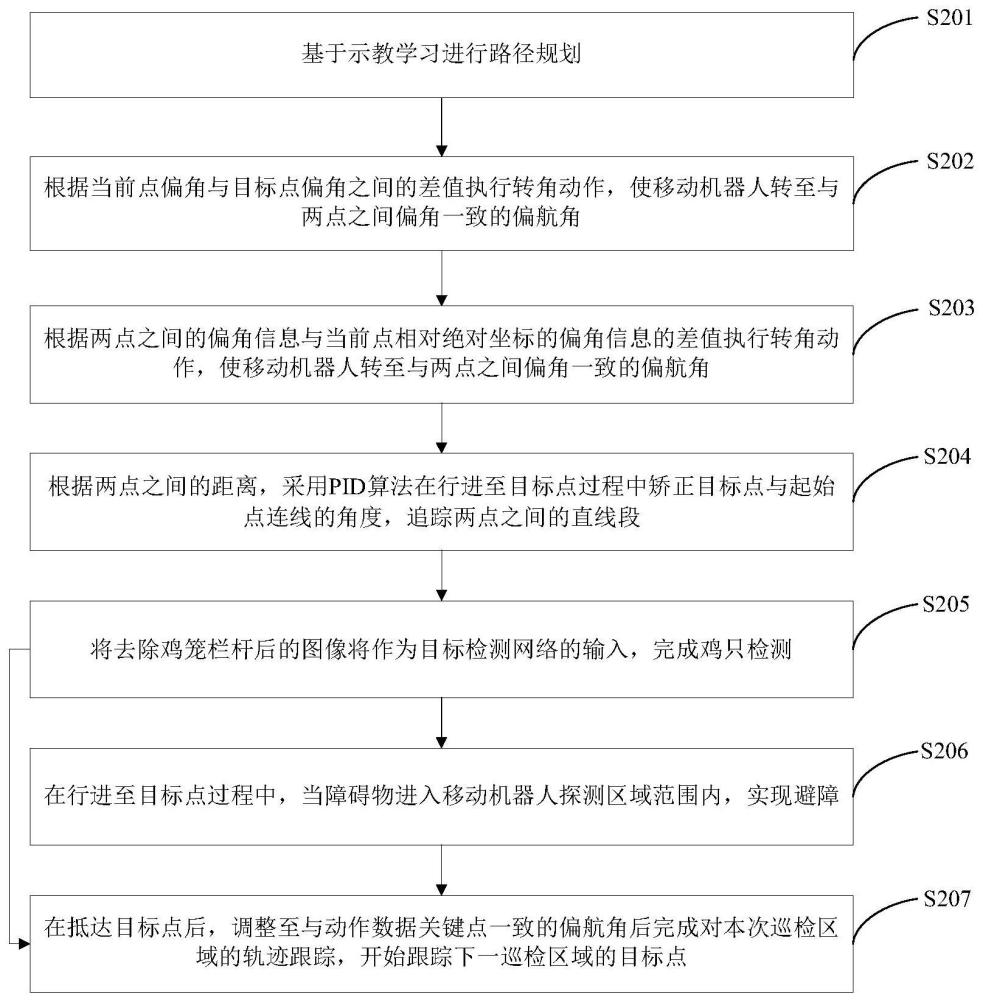
8、基于示教学习进行路径规划;
9、根据示教过程中记录的一系列动作数据关键点的位姿信息,得到当前点与下一目标点的位置与角度信息;
10、根据当前点偏角与目标点偏角之间的差值执行转角动作,使移动机器人转至与两点之间偏角一致的偏航角;
11、根据两点之间的距离,采用pid算法在行进至目标点过程中矫正目标点与起始点连线的角度,追踪两点之间的直线段;
12、在行进至目标点过程中,当障碍物进入移动机器人探测区域范围内,实现避障;
13、在抵达目标点后,调整至与动作数据关键点一致的偏航角后完成对本次巡检区域的轨迹跟踪,开始跟踪下一巡检区域的目标点。
14、进一步的,所述基于示教学习进行路径规划,具体包括:
15、确定移动机器人起始点与终点信息,获取移动机器人的多条示教轨迹;
16、学习获取多条示教轨迹的动作数据与环境数据,将动作数据关键点按照巡检区域分割,得到多条子区域的示教轨迹信息;
17、根据获取的环境数据剔除掉易与障碍物发生碰撞的轨迹点,并对多条子区域的示教轨迹进行修正拟合;
18、根据多条修正后的轨迹生成适用于鸡舍环境的巡检示教轨迹。
19、进一步的,所述对多条子区域的示教轨迹进行修正拟合,具体包括:
20、利用高斯混合模型与高斯混合回归对多条子区域的示教轨迹进行修正,消除轨迹噪声,以获得平滑的示教轨迹;
21、利用动态基元参数化模型学习修正后的多条子区域的示教轨迹,从而增强在鸡舍强环境约束下的泛化能力,生成拟合后的示教轨迹。
22、进一步的,所述实现避障,具体包括:
23、利用测距传感器对探测范围内的障碍物的角度和位置进行测量,建立极性坐标系;
24、将环绕移动机器人一圈的融合滚动检测窗口数据按照度数划分为不同区域范围,对区间进行二次处理,处理掉不满足运动约束的区间,从剩余区间中计算出代价最小的区间,此区间的中间角度作为速度方向进行输出。
25、进一步的,所述基于示教学习进行路径规划之后,还包括:
26、根据激光测距传感器得到的距离值求得移动机器人与垂直的墙壁夹角位置;
27、利用几何关系求得移动机器人质心与两侧墙壁的距离,得到机器人的位置信息;
28、将当前位置信息与目标位置信息进行比较,确立移动距离,利用纯跟踪算法从当前位置移动至目标点位置;
29、根据激光测距传感器得到的距离值获得移动机器人与垂直的墙壁夹角,旋转该夹角至与左侧墙壁平行位置,更新移动机器人状态信息到位姿传感器,完成初始位姿矫正;
30、利用卡尔曼滤波算法对轮询一圈的测距传感器数据实时处理,消除测距传感器对两侧笼网镂空面或喂料槽下凹凸不平的表面感知出现的周期性的锯齿扰动。
31、本发明的第二个目的可以通过采取如下技术方案达到:
32、一种笼养鸡舍内巡检导航系统,所述系统包括:
33、路径规划模块,用于基于示教学习进行路径规划;
34、获取模块,用于根据示教过程中记录的一系列动作数据关键点的位姿信息,得到当前点与下一目标点的位置与角度信息;
35、执行模块,用于根据当前点偏角与目标点偏角之间的差值执行转角动作,使移动机器人转至与两点之间偏角一致的偏航角;
36、追踪模块,用于根据两点之间的距离,采用pid算法在行进至目标点过程中矫正目标点与起始点连线的角度,追踪两点之间的直线段;
37、避障模块,用于在行进至目标点过程中,当障碍物进入移动机器人探测区域范围内,实现避障;
38、调整模块,用于在抵达目标点后,调整至与动作数据关键点一致的偏航角后完成对本次巡检区域的轨迹跟踪,开始跟踪下一巡检区域的目标点。
39、本发明的第三个目的可以通过采取如下技术方案达到:
40、一种移动机器人,包括机器人平台,所述机器人平台上搭载有控制器、测距传感器、位姿传感器和安全触边传感器,所述测距传感器、位姿传感器和安全触边传感器分别与控制器连接;
41、所述测距传感器,用于感知障碍物的距离、大小以及方位;
42、所述位姿传感器,用于估计移动机器人当前时刻的绝对位置与姿态;
43、所述安全触边传感器,用于移动机器人在紧急情况下停止运动;
44、所述控制器,用于执行上述的笼养鸡舍内巡检导航方法。
45、进一步的,所述测距传感器包括一个单线机械式激光雷达、六个超声波测距传感器以及四个激光测距传感器;
46、单线机械式激光雷达安装在机器人平台的中心位置,采用光时间飞行法对周围360度环境进行二维扫描测量,并与控制器通过串口连接;
47、六个超声波传感器以六边形的排列方式安装在机器人平台的确定朝向位置与单线机械式激光雷达形成融合滚动检测窗口,六个超声波传感器以rs485总线形式与控制器连接通信;
48、四个激光测距传感器分别布置在机器人平台左侧的前后位置与后侧的左右位置,与机器人平台侧边保持平行,四个激光测距传感器采用rs485总线与控制器通信。
49、进一步的,所述位姿传感器包括基于mems的陀螺仪、加速度计和磁力计组成的航姿参考系统和增量式光电编码器,航姿参考系统将航向、横滚、俯仰角度数据通过串口dma发送至控制器,编码器通过信号线与电机上的电驱控制器连接,控制器通过读取对应的电机上增量式编码器的脉冲反馈信号,运算得到移动机器人的里程信息;
50、安全触边传感器包括安全触点和感应信号带,安全触点设置在机器人平台四周的表面,感应信号带隔着柔性带状物将设置有安全触点的机器人平台表面包裹起来,安全触边传感器通过感应信号带内部的导电条与安全触点相互接触,进而使安全触点的电流和电阻发生变化,向控制器发送相应的碰撞信号。
51、本发明的第四个目的可以通过采取如下技术方案达到:
52、一种计算机可读存储介质,存储有程序,所述程序被处理器执行时,实现上述的笼养鸡舍内巡检导航方法。
53、本发明相对于现有技术具有如下的有益效果:
54、1、本发明提出了路径跟踪与避障算法,根据结构化的鸡舍场景下,利用当前点与目标点的位置信息和角度信息,引导移动机器人朝向目标点方向行进。并在移动机器人检测到不同障碍物时进行及时避让调整,保证了巡检过程的稳定性与可靠性。
55、2、本发明提出了基于示教学习的路径规划算法,利用移动机器人上安装的位姿传感器和增量式编码器得到的航姿信息,实现了对关键路径位置点的获取,提高了巡检效率,更好地帮助移动机器人提升在复杂场景下的路径规划能力。
56、3、本发明利用搭载在移动机器人上的激光测距传感器与激光雷达,根据几何关系获取移动机器人与相对于垂直墙角的位置关系,使目标点移动至初始位置,更新机器人的位姿信息,从而提高了下一次巡检过程中的初始位姿的精度,减小了惯性导航带来的累计偏差问题。
57、4、本发明利用卡尔曼滤波算法对滚动检测窗口做滤波融合,针对移动机器人在进入巡检过道后对两侧笼网镂空面出现数据波动的情况,做了进一步的改善,提高了测距准确度。
- 还没有人留言评论。精彩留言会获得点赞!