一种无人机降落控制方法及装置
本发明涉及无人机,尤其涉及一种无人机降落控制方法及装置。
背景技术:
1、随着无人机系统的不断发展,无人机的应用越来越广泛。无人机通常被应用于需要高精度控制的任务中,例如,物资投送、搜索救援、自动充电等。在执行这些任务的过程中,无人机需要在复杂的环境中进行精准降落,无人机只有精准的降落才能有效的执行任务。
2、目前,对无人机进行降落控制,需要获取无人机机载相机的内参数矩阵,基于内参数矩阵使用ippe算法求解pnp问题,通过求解的pnp问题估计无人机与地标之间的相对位姿,以调整无人机的姿态和位置。
3、然而,基于内参数矩阵使用ippe算法求解pnp问题是通过内参数矩阵将二维的图像转换到三维空间中,确定无人机与地标在三维空间中的相对位姿,确定无人机与地标在三维空间中的相对位姿中的参数较多,参数多于10个,通过较多的参数来求解pnp问题,使得求解pnp问题更加复杂,求解pnp问题所消耗的时间较长,通过求解的pnp问题估计无人机与地标之间的相对位姿所消耗的时间也较长,使得无人机降落控制的时间较长,导致无人机降落控制的效率较低。
技术实现思路
1、本发明实施例的目的是提供一种无人机降落控制方法及装置,解决无人机降落控制的效率较低的问题。
2、为解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明第一方面提供一种无人机降落控制方法,方法包括:
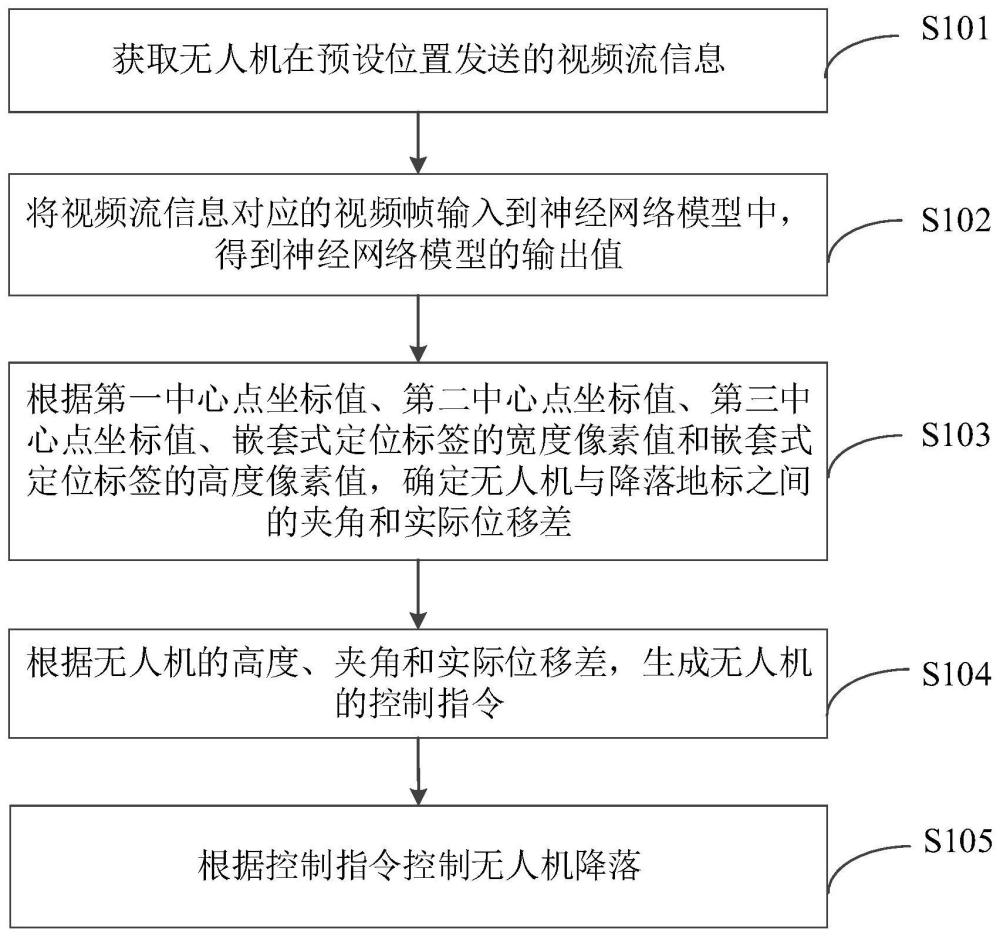
4、获取无人机在预设位置发送的视频流信息,视频流信息为包含有预先设置的降落地标的信息,预先设置的降落地标包括嵌套式定位标签和方向定位标签;
5、将视频流信息对应的视频帧输入到神经网络模型中,得到神经网络模型的输出值,输出值包括嵌套式定位标签的第一中心点坐标值、方向定位标签的第二中心点坐标值、视频帧的第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值;
6、根据第一中心点坐标值、第二中心点坐标值、第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值,确定无人机与降落地标之间的夹角和实际位移差;
7、根据无人机的高度、夹角和实际位移差,生成无人机的控制指令;
8、根据控制指令控制无人机降落。
9、在本发明第一方面的一些变更实施方式中,降落地标是圆形,在圆形的中心点嵌套设置两层h形图案的嵌套式定位标签,在圆形内和两层h形图案外设置圆角矩形图案的方向定位标签,圆角矩形图案在外层的h形图案的正上方,外层的h形图案与内层的h形图案的中心点重合,且外层的h形图案与内层的h形图案在同一个平面上。
10、在本发明第一方面的一些变更实施方式中,根据第一中心点坐标值、第二中心点坐标值、第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值,确定无人机与降落地标之间的夹角和实际位移差,包括:
11、获取嵌套式定位标签的宽度和高度;
12、根据如下第一公式确定无人机与降落地标的相对位移差:
13、
14、其中,distance_pixel_x为无人机与降落地标在x轴方向的相对位移差,distance_pixel_y为无人机与降落地标在y轴方向的相对位移差,(x1,y1)为第一中心点坐标值,(x2,y2)为第三中心点坐标值;
15、根据如下第二公式确定无人机与降落地标之间的实际位移差:
16、
17、
18、其中,distance_x为无人机与降落地标在x轴方向的实际位移差,distance_y为无人机与降落地标在y轴方向的实际位移差,k为单位像素的厘米数,w为嵌套式定位标签的宽度,h为嵌套式定位标签的高度,w_pixel为嵌套式定位标签的宽度像素,h_pixel为嵌套式定位标签的高度像素。
19、在本发明第一方面的一些变更实施方式中,根据如下第二公式确定无人机与降落地标之间的实际位移差,包括:
20、当无人机的高度大于第一预设值时,第二公式中的w为外层h形图案的嵌套式定位标签的宽度,h为外层h形图案的嵌套式定位标签的高度,w_pixel为外层h形图案的嵌套式定位标签的宽度像素,h_pixel为外层h形图案的嵌套式定位标签的高度像素;
21、当无人机的高度小于第一预设值时,第二公式中的w为内层h形图案的嵌套式定位标签的宽度,h为内层h形图案的嵌套式定位标签的高度,w_pixel为内层h形图案的嵌套式定位标签的宽度像素,h_pixel为内层h形图案的嵌套式定位标签的高度像素。
22、在本发明第一方面的一些变更实施方式中,根据无人机的高度、夹角和实际位移差,生成无人机的控制指令,包括:
23、判断夹角是否小于预设夹角值,且实际位移差是否小于预设位移差值;
24、若是,则当无人机的高度大于第二预设值时,则生成下降指令,当无人机的高度小于第二预设值时,则生成降落指令;
25、若否,则将夹角和实际位移差输入到闭环控制系统,以通过闭环控制系统的pid算法,输出无人机的线速度值或角速度值,并根据线速度值或角速度值生成平移或旋转指令。
26、在本发明第一方面的一些变更实施方式中,将夹角和实际位移差输入到闭环控制系统,以通过闭环控制系统的pid算法,输出无人机的线速度值或角速度值,并根据线速度值或角速度值生成平移或旋转指令,包括:
27、当无人机的高度大于第二预设值时,将夹角和实际位移差输入到闭环控制系统,以通过闭环控制系统的pid算法,输出无人机的第一线速度值;
28、根据第一线速度值生成第一平移指令;
29、当无人机的高度大于第一预设值并小于第二预设值时,将夹角和实际位移差输入到闭环控制系统,以通过闭环控制系统的pid算法,输出无人机的第二线速度值和角速度值,第一预设值小于第二预设值;
30、根据第二线速度值和角速度值,生成第二平移指令和旋转指令;
31、当无人机的高度小于第一预设值时,将夹角和实际位移差输入到闭环控制系统,以通过闭环控制系统的pid算法,输出无人机的第三线速度值;
32、根据第三线速度值,生成第三平移指令,以及在当前的实际位移差小于预设位移差值时,生成降落指令。
33、在本发明第一方面的一些变更实施方式中,根据控制指令控制无人机降落,包括:
34、在生成第一平移指令时,控制无人机以第一线速度值平移实际位移差的距离;
35、在生成第二平移指令和旋转指令时,控制无人机以第二线速度值平移实际位移差的距离,并在无人机平移的过程中控制无人机以角速度值旋转夹角的角度;
36、在生成第三平移指令时,控制无人机以第三线速度值平移实际位移差的距离,以及在当前的实际位移差小于预设位移差值时,控制无人机降落。
37、在本发明第一方面的一些变更实施方式中,神经网络模型为yolov5s网络和ghostnet网络结合的模型。
38、本发明第二方面提供一种无人机降落控制装置,装置包括:
39、获取模块,用于获取无人机在预设位置发送的视频流信息,所述视频流信息为包含有预先设置的降落地标的信息,所述预先设置的降落地标包括嵌套式定位标签和所述方向定位标签;
40、输入模块,用于将视频流信息对应的视频帧输入到神经网络模型中,得到神经网络模型的输出值,输出值包括嵌套式定位标签的第一中心点坐标值、方向定位标签的第二中心点坐标值、视频帧的第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值;
41、确定模块,用于根据第一中心点坐标值、第二中心点坐标值、第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值,确定无人机与降落地标之间的夹角和实际位移差;
42、生成模块,用于根据无人机的高度、夹角和实际位移差,生成无人机的控制指令;
43、控制模块,用于根据控制指令控制无人机降落。
44、本发明第三方面提供一种计算机可读存储介质,存储介质包括存储的程序,其中,在程序运行时控制存储介质所在设备执行上述第一方面或第一方面任一种可选的实施例的无人机降落控制方法。
45、相较于现有技术,本发明提供的无人机降落控制方法及装置,将包含嵌套式定位标签和方向定位标签的视频流信息输入到神经网络模型中,可以得到包括嵌套式定位标签的第一中心点坐标值、方向定位标签的第二中心点坐标值、视频帧的第三中心点坐标值、嵌套式定位标签的宽度像素值和嵌套式定位标签的高度像素值的输出值,通过这些输出值就可以确定出无人机与降落地标之间的夹角和实际位移差,根据无人机的高度、夹角和实际位移差所生成无人机的控制指令,来控制无人机降落;和现有技术的通过求解的pnp问题估计无人机与地标之间的相对位姿相比,本发明只需将视频流信息输入到神经网络模型中就可以得到输出值,输出值的数量较少,通过较少的输出值确定无人机与降落地标之间的夹角和实际位移差,不需要通过较多的参数来求解pnp问题来估计无人机与地标之间的相对位姿,使得通过较少的输出值所确定的无人机与降落地标之间的夹角和实际位移差的时间较短,使得根据无人机的高度、夹角和实际位移差所生成无人机的控制指令,来控制无人机降落的时间较短,进而提高控制无人机降落的效率。
- 还没有人留言评论。精彩留言会获得点赞!