一种基于状态和估计参数触发的机器人系统跟踪控制方法
本发明涉及机器人系统的跟踪控制,特别涉及一种基于状态和估计参数触发的机器人系统跟踪控制方法。
背景技术:
1、不同于时间触发控制策略,事件触发因具有仅在设置的事件发生时才更新控制信号的特性,因而能够减少信号传送负担并节约通信资源。值得指出的是,现有的许多相关控制策略仅对控制信号设置了触发机制,即仅考虑了减少控制器到执行器之间信号传送的负担,而此时传感器与参数估计器仍需要持续不断地将状态变量与估计参数传送至控制器,这就可能带来不必要的资源浪费。近期,虽然有一些研究成果试图通过在输出/状态或者估计参数上设置事件触发机制来减少传感器到控制器之间信号传输中的通信和计算负担,不过几乎所有相关成果仅研究了单输入单输出形式的线性或非线性系统的控制问题,该类方法并不适用于多输入多输出不确定非线性系统。实际上,机器人系统作为一种多输入多输出的非线性不确定系统被广泛应用于生活和工作之中,因此研究基于事件触发机制的机器人系统的跟踪控制仍具有潜在的应用价值。
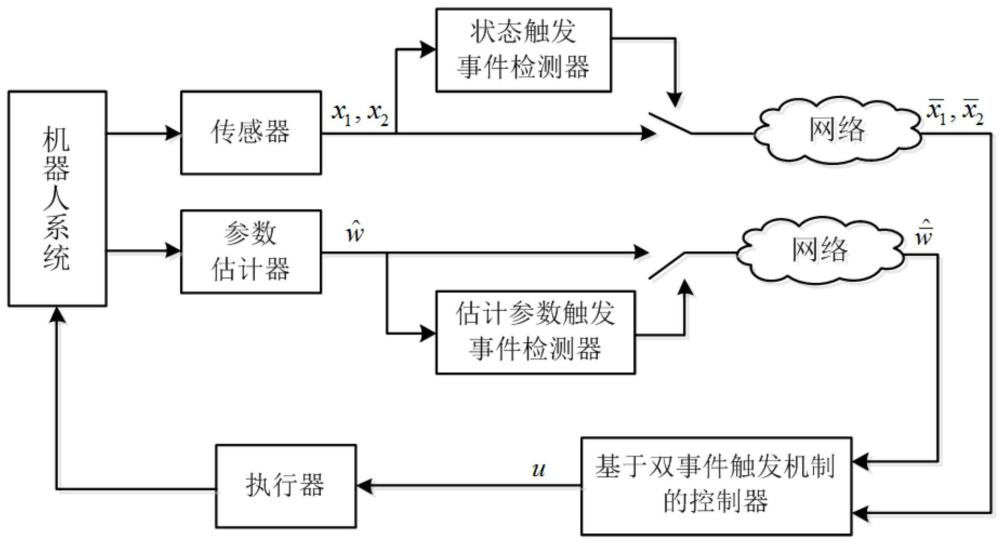
2、本发明针对非线性不确定机器人系统的跟踪控制问题,同时考虑由状态触发和估计参数触发共同构成的双事件触发机制,提出一种基于双事件触发机制的神经网络自适应控制方法,以显著减少传感器到控制器之间的信号传送负担和计算负担,提高所提控制方法的实用性。
技术实现思路
1、本发明的目的针对非线性不确定机器人系统,提供一种基于状态和估计参数触发的机器人系统跟踪控制方法,该方法保证关节角位移紧密地跟踪期望轨迹,能够减少传感器到控制器之间的信号传送负担和计算负担。
2、本发明的一种基于状态和估计参数触发的机器人系统跟踪控制方法,包括以下步骤:
3、步骤1,建立一类具有n关节的机器人系统动力学模型;
4、步骤2,构建由状态触发和估计参数触发共同构成的双事件触发机制;
5、步骤3,在未考虑任何事件触发机制的情况下设计常规的神经网络自适应控制器;
6、步骤4,基于步骤3中控制器的结构,设计基于双事件触发机制的神经网络自适应控制方案,减少传感器到控制器之间的信号传送负担和计算负担;
7、进一步的,步骤1中建立一类具有n关节的机器人系统动力学模型,如下:
8、
9、其中,q∈rn,与分别为关节角位移、角速度与角加速度,m(q)∈rn×n,以及g(q)∈rn则分别表示惯性矩阵、科氏力矩阵及重力矢量,τ∈rn代表控制转矩。
10、令x1=q,以及u=τ,那么机器人系统(1)可以转换为如下二阶系统:
11、
12、进一步的,步骤2中构建状态触发和估计参数触发共同构成的双事件触发机制,具体如下:
13、①状态触发机制:
14、
15、
16、其中,m∈z+,△x1>0与△x2>0表示用户设定的关于状态x1和状态x2的触发门槛,t1(m+1)与t2(m+1)则分别表示状态x1和状态x2的触发时刻,和分别表示x1和x2被触发后的状态。
17、②估计参数触发机制:
18、
19、其中,m∈z+,△w>0是用户设定的关于估计参数的触发门槛,tw(m+1)则表示估计参数的触发时刻。这里,是神经网络未知权重矩阵w∈rp×n的估计值,表示被触发后的状态。
20、进一步的,步骤3中在未考虑任何事件触发机制的情况下设计常规的神经网络自适应控制器,所设计的控制器如下:
21、
22、其中,l1>0,l2>0,r>0与σ>0是设计参数,yd是期望轨迹,ν1是虚拟控制变量,ν2是中间变量,z1=x1-yd和z2=x2-ν1分别是跟踪误差和虚拟跟踪误差,表示神经网络基函数,是神经网络的输入信号。
23、从而,考虑机器人系统(1),在未考虑任何事件触发机制的情况下所设计常规的神经网络自适应控制器(6)能够保证关节角位移紧密地跟踪期望轨迹。
24、进一步的,步骤4中基于步骤3中控制器的结构,设计基于双事件触发机制的神经网络自适应控制方案,减少传感器到控制器之间的信号传送负担和计算负担。
25、为便于控制器的设计,首先重新定义新的跟踪误差和虚拟误差具体如下:
26、
27、
28、基于步骤3所设计的控制器(6)的结构,用触发后的变量代替原来的变量,设计得到基于双事件触发机制的神经网络自适应控制方案,具体如下:
29、
30、其中,
31、进一步的,本发明的一种基于状态和估计参数触发的机器人系统跟踪控制方法还包括步骤5,建立关于步骤2中构建的双事件触发机制带来的误差的限制性条件,保证系统的稳定性,同时保证关节角位移紧密地跟踪期望轨迹。
32、基于步骤3和步骤4中所设计的控制方案,限制性条件如下:
33、
34、其中,△z1,△z2和θ表示与触发门槛(△x1,△x2,△w)相关的正数,具体为,△z1=△x1,△z2=△x2+△ν1,△ν1=l1△z1,为正数,且p为神经元的个数。
35、进一步的,基于该限制性条件,分析所设计的控制方案(9)能够保证系统稳定性以及关节角位移紧密地跟踪期望轨迹,具体包括如下步骤:
36、s1:由z1=x1-yd可以推出:
37、
38、选取李雅普诺夫函数v1如下:
39、
40、根据式(11),容易推出v1对时间t的导数为:
41、
42、将ν1代入式(13),可得:
43、
44、s2:由z2=x2-ν1与式(2),可以推出:
45、
46、其中,是一个未知函数,将其用神经网络逼近可得:
47、
48、其中,δ(χ)∈rn表示神经网络的逼近误差并且满足其中为某一未知常数。将式(16)代入式(15)有:
49、
50、选取李雅普诺夫函数v2如下:
51、
52、其中,表示参数估计误差。对v2求导可得:
53、
54、注意到,步骤3中设计的控制器u可以写为如下形式:
55、
56、进而可以推出:
57、
58、其中,通过选取设计参数满足条件l1>0,以及即可保证
59、
60、考虑具有状态触发和估计参数触发的机器人系统(1),步骤4中设计的基于双事件触发机制的神经网络自适应控制方案(9),不仅能够保证闭环系统所有信号均有界,而且可以确保关节角位移紧密地跟踪期望轨迹。此外,所设计的双事件触发机制不存在芝诺现象。
61、进一步的,由式(26)可得从而可得z1,z2及均有界。结合限制性条件(10)容易分析得出闭环系统所有信号均有界。
62、由式(26),可以进一步得到:
63、
64、根据与式(27)可得:
65、
66、由此可知,当t→∞时,有这就意味着可以通过调整设计参数使跟踪误差足够小,即保证关节角位移紧密地跟踪期望轨迹。
67、进一步的,接下来分析所设计的双事件触发机制不存在芝诺现象,具体如下:
68、①对于状态触发情形
69、记由于为避免可能存在的奇异值问题,这里用对求导来代替对||e1||的直接求导,具体如下:
70、
71、由于并且x2是有界的,因此存在常数s1>0使得||x2||≤s1,故因此有:
72、
73、对式(30)积分容易推出:
74、
75、即
76、
77、由于||e1(t1m)||=0且可得:
78、
79、记状态x1的最小触发时间间隔为由式(33)可得:
80、
81、类似地,记有
82、
83、由于且x2,m,c,g和u均是有界的,所以也是有界的,故存在正数s2>0使得由此有:
84、
85、记状态x2的最小触发时间间隔为通过类似式(31)-(33)的分析过程,可得:
86、
87、②对于估计参数触发情形
88、记由于ew(t)是矩阵,这里对求导可得:
89、
90、通过前面的分析已证得z2,以及均是有界的,因此由式(38)可知也是有界的,故存在常数κw>0使得下式成立:
91、
92、从而,记估计参数的最小触发时间间隔为通过进一步分析易得:
93、
94、综上,由式(34)、(37)和(40)可得,所设计的双事件触发机制不存在芝诺现象。
95、本发明的有益效果:
96、1、本发明提出的一种基于状态和估计参数触发的机器人系统跟踪控制方法,能够保证关节角位移紧密地跟踪期望轨迹,而且所设计的双事件触发机制不仅不存在芝诺现象,还能够显著减少传感器到控制器之间的信号传送负担和计算负担,从而提高了基于双事件触发机制的神经网络自适应控制方案的实用性;
97、2、本发明与现有大多方法中对于矢量变量的每个元素分别设置触发机制的处理方式不同,本发明直接采取向量范数或者矩阵的迹的形式设置新的触发机制,显著减少了控制器执行时需判别的事件个数以及计算量,进一步降低控制器实施的复杂性,从而更便于控制器的实施;
98、3、本发明在证明所提出的双事件触发机制不存在芝诺现象时,提出了一种新的公式化证明方法,避免了直接对矢量范数求导可能存在的奇异值问题,提高了算法的可行性。
- 还没有人留言评论。精彩留言会获得点赞!