掘锚机输送机尾的控制方法、装置、设备及存储介质与流程
本技术涉及工业设备控制,尤其涉及一种掘锚机输送机尾的控制方法、装置、设备及存储介质。
背景技术:
1、相关技术中,当使用掘锚机在矿井内进行作业时,需要控制绝掘锚机输送机尾的位置,以确保掘锚机输送机尾输送的煤炭安全且稳定的传送至运煤设备,避免出现撒煤以及设备碰撞。但掘锚机输送机尾的位置控制较为复杂,人工控制的控制速度和精确度较低,且可能对操作人员的人身安全造成危险。
技术实现思路
1、本技术提供了一种掘锚机输送机尾的控制方法、装置、电子设备及存储介质。可以实现掘锚机输送机尾的自动化控制,确保掘锚机运输机尾和运煤设备平稳承接,提高煤矿开采的安全性和稳定性。
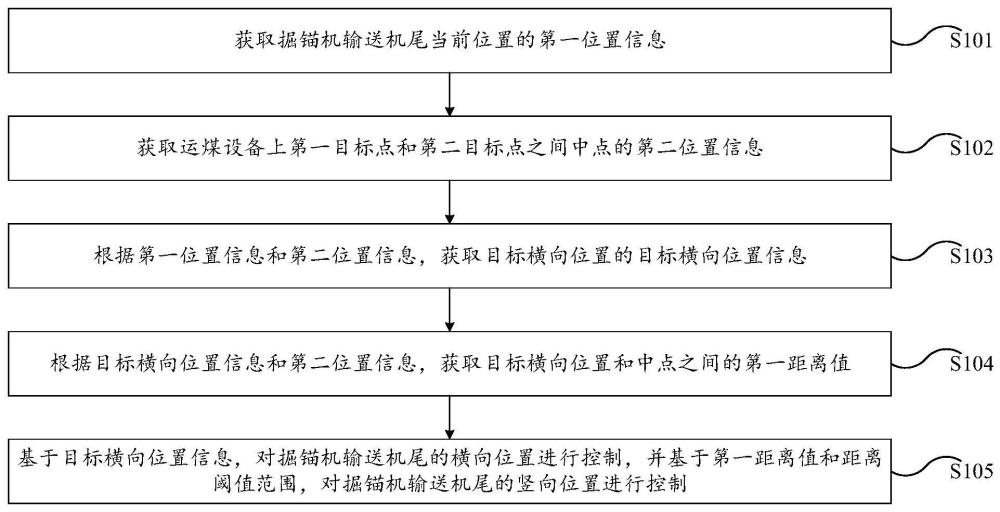
2、第一方面,本技术实施例提供一种掘锚机输送机尾的控制方法,包括:获取掘锚机输送机尾当前位置的第一位置信息;获取运煤设备上第一目标点和第二目标点之间中点的第二位置信息;其中,所述第一目标点和所述第二目标点分别位于所述运煤设备的两侧;根据所述第一位置信息和所述第二位置信息,获取目标横向位置的目标横向位置信息;根据所述目标横向位置信息和所述第二位置信息,获取所述目标横向位置和所述中点之间的第一距离值;基于所述目标横向位置信息,对所述掘锚机输送机尾的横向位置进行控制,并基于所述第一距离值和距离阈值范围,对所述掘锚机输送机尾的竖向位置进行控制。
3、在该技术方案中,可以根据掘锚机输送机尾的当前位置信息,以及运煤设备上第一目标点和第二目标点之间中点的第二位置信息,获取目标横向位置信息,以根据目标横向位置信息对掘锚机输送机尾的横向位置进行控制,并获取目标横向位置和中点之间的第一距离值,以基于第一距离值和距离阈值范围,对掘锚机输送机尾的竖向位置进行控制。可以实现掘锚机输送机尾的自动化控制,确保掘锚机运输机尾和运煤设备平稳承接,提高了煤矿开采的安全性和稳定性。
4、在一种实现方式中,所述根据所述第一位置信息和所述第二位置信息,获取目标横向位置的目标横向位置信息,包括:根据所述第一位置信息和所述第二位置信息,确定所述当前位置与所述中点之间的第二距离值;响应于所述第二距离值小于或等于距离阈值,根据所述第一位置信息和所述第二位置信息,获取所述目标横向位置信息。
5、在一种可选地实现方式中,所述方法还包括:响应于所述第二距离值大于所述距离阈值,经预设时间后返回执行所述根据所述第一位置信息和所述第二位置信息,确定所述当前位置与所述中点之间的第二距离值的步骤。
6、在一种可选地实现方式中,所述距离阈值通过以下步骤获取:获取所述掘锚机输送机尾的待机位置的待机位置信息;获取通过所述中点并且与所述第一目标点和所述第二目标点之间连线垂直的平面的平面位置信息;根据所述待机位置信息和所述平面位置信息,确定所述掘锚机输送机尾以所述待机位置为基准横向移动时与所述平面相交的第二目标位置的位置信息;根据所述第二目标位置的位置信息和所述第二位置信息,获取所述第二目标位置与所述中点之间的距离值,作为所述距离阈值。
7、在一种实现方式中,所述根据所述第一位置信息和所述第二位置信息,获取目标横向位置的目标横向位置信息,包括:获取通过所述中点且与所述第一目标点和所述第二目标点之间的连线垂直的平面的平面位置信息;根据所述平面位置信息,获取所述掘锚机输送机尾以所述当前位置为基准进行横向移动时与所述平面相交的所述目标横向位置,将所述目标横向位置对应的位置信息作为所述目标横向位置信息。
8、在一种实现方式中,所述基于所述目标横向位置信息,对所述掘锚机输送机尾的横向位置进行控制,包括:根据所述第一位置信息和所述目标横向位置信息,确定所述掘锚机输送机尾的横向偏移角度和横向偏移方向;基于所述横向偏移角度,控制所述掘锚机输送机尾沿所述横向偏移方向移动至所述目标横向位置。
9、在一种实现方式中,所述基于所述第一距离值和距离阈值范围,对所述掘锚机输送机尾的竖向位置进行控制,包括:确定所述掘锚机输送机尾的目标竖向位置范围;响应于所述第一距离值不在所述距离阈值范围内,根据所述第一位置信息和所述目标竖向位置范围确定所述掘锚机输送机尾的竖向偏移角度和竖向偏移方向;根据所述竖向偏移角度,控制所述掘锚机输送机尾沿所述竖向偏移方向移动至所述目标竖向位置范围内。
10、第二方面,本技术实施例提供一种掘锚机输送机尾的控制装置,包括:第一获取模块,用于获取掘锚机输送机尾当前位置的第一位置信息;第二获取模块,用于获取运煤设备上第一目标点和第二目标点之间中点的第二位置信息;其中,所述第一目标点和所述第二目标点分别位于所述运煤设备的两侧;第一处理模块,用于根据所述第一位置信息和所述第二位置信息,获取目标横向位置的目标横向位置信息;第二处理模块,用于根据所述目标横向位置信息和所述第二位置信息,获取所述目标横向位置和所述中点之间的第一距离值;控制模块,用于基于所述目标横向位置信息,对所述掘锚机输送机尾的横向位置进行控制,并基于所述第一距离值和距离阈值范围,对所述掘锚机输送机尾的竖向位置进行控制。
11、在一种实现方式中,所述第一处理模块具体用于:根据所述第一位置信息和所述第二位置信息,确定所述当前位置与所述中点之间的第二距离值;响应于所述第二距离值小于或等于距离阈值,根据所述第一位置信息和所述第二位置信息,获取所述目标横向位置信息。
12、在一种可选地实现方式中,所述第一处理模块还用于:响应于所述第二距离值大于所述距离阈值,经预设时间后返回执行所述根据所述第一位置信息和所述第二位置信息,确定所述当前位置与所述中点之间的第二距离值的步骤。
13、在一种可选地实现方式中,所述装置还包括第三处理模块,用于获取所述掘锚机输送机尾的待机位置的待机位置信息;获取通过所述中点并且与所述第一目标点和所述第二目标点之间连线垂直的平面的平面位置信息;根据所述待机位置信息和所述平面位置信息,确定所述掘锚机输送机尾以所述待机位置为基准横向移动时与所述平面相交的第二目标位置的位置信息;根据所述第二目标位置的位置信息和所述第二位置信息,获取所述第二目标位置与所述中点之间的距离值,作为所述距离阈值。
14、在一种实现方式中,所述第一处理模块具体用于:获取通过所述中点且与所述第一目标点和所述第二目标点之间的连线垂直的平面的平面位置信息;根据所述平面位置信息,获取所述掘锚机输送机尾以所述当前位置为基准进行横向移动时与所述平面相交的所述目标横向位置,将所述目标横向位置对应的位置信息作为所述目标横向位置信息。
15、在一种实现方式中,所述控制模块具体用于:根据所述第一位置信息和所述目标横向位置信息,确定所述掘锚机输送机尾的横向偏移角度和横向偏移方向;基于所述横向偏移角度,控制所述掘锚机输送机尾沿所述横向偏移方向移动至所述目标横向位置。
16、在一种实现方式中,所述控制模块具体用于:确定所述掘锚机输送机尾的目标竖向位置范围;响应于所述第一距离值不在所述距离阈值范围内,根据所述第一位置信息和所述目标竖向位置范围确定所述掘锚机输送机尾的竖向偏移角度和竖向偏移方向;根据所述竖向偏移角度,控制所述掘锚机输送机尾沿所述竖向偏移方向移动至所述目标竖向位置范围内。
17、第三方面,本技术实施例提供一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面所述的掘锚机输送机尾的控制方法。
18、第四方面,本技术实施例提供一种计算机可读存储介质,用于存储有指令,当所述指令被执行时,使如第一方面所述的方法被实现。
19、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如第一方面所述的掘锚机输送机尾的控制方法的步骤。
20、应当理解,本部分所描述的内容并非旨在标识本技术的实施例的关键或重要特征,也不用于限制本技术的范围。本技术的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!