一种移动机器人局部避障方法与流程
本发明涉及机器人避障路径规划领域,特别涉及一种移动机器人局部避障方法。
背景技术:
1、近年来,随着众多前沿学科的研究成果不断引入移动机器人领域,使得移动机器人技术得到快速的发展,并取得了丰富的研究成果。随着机器人技术的不断发展,移动机器人逐渐应用于智能制造、医疗服务、仓储物流等诸多领域受益。
2、对于复杂场景下,移动机器人由当前位置出发,经路径规划算法规划的路径行驶,在行驶至当前任务指定位置前,机器人行驶路径上可能会存在行人、车辆等动态障碍物,从而对机器人正常行驶造成影响。因而,移动机器人全局路径行驶过程中,在遭遇动态障碍物时,需要快速的进行动态路径调整规划以避开障碍物重新向目标位置触发,减少障碍物对机器人移动的影响,减少任务执行时间,对降低运输成本具有实际意义。然后现有技术的避障仅仅是绕过该障碍物,但是如何返回到原有路径上继续移动,现有技术则无法进行有效的控制。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种移动机器人局部避障方法,在机器人的移动路径上遇到障碍物后可以进行避障的同时还能快速返回到原始路径上继续进行移动。
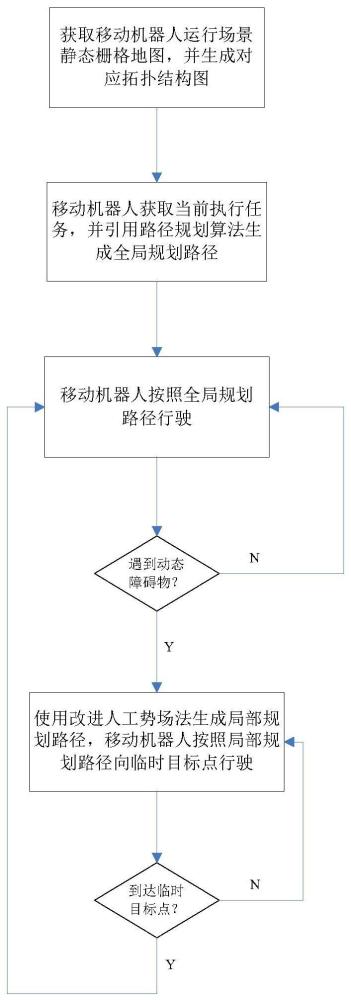
2、为了实现上述目的,本发明采用的技术方案为:一种移动机器人局部避障方法,包括移动机器人基于当前位置和目标位置进行路径规划得到全局路径,并按照全局路径进行行驶,当在全局路径上遇到障碍物后,进入局部避障阶段,在局部避障阶段,通过局部路径规划算法规划一条避开障碍物的且由机器人当前位置到全局路径上临时目标点上的局部路径,按照局部路径运行到临时目标点后继续沿全局路径朝向目标位置前进。
3、移动机器人获取当前拟执行任务,并采用全局路径规划算法规划一条由移动机器人当前位置到任务位置之间的全局路径,移动机器人由当前位置出发,根据全局路径向目标位置行驶,行驶过程中实时检测一定范围内动态障碍物影响,当存在障碍物处于移动机器人安全行驶路径范围时,即进入动态障碍物局部避障阶段。
4、当移动机器人进入局部避障阶段时,设定机器人临时目标点,并过滤机器人周边障碍物点云数据;获取临时目标点与移动机器人周边障碍物点云集合对机器人引力与斥力集合,并按设计步长逐次获取移动机器人下一时刻位置,直至抵达临时目标点位置。
5、设定机器人临时目标点包括:当存在动态障碍物处于移动机器人安全行驶范围时,移动机器人进入局部避障阶段,在获取移动机器人当前位置在全局规划路径上对应位置,即获取机器人当前位置(xc,yc)处于全局路径点集上的索引indexi,由当前索引path_indexi出发获取全局路径点集中距离移动机器人当前位置设定距离disttemp_g的临时目标点对应索引indextemp_g,若通过移动机器人搭载的激光雷达判定临时目标点位于障碍物区域,则继续迭代直至当前临时目标点位于空闲区域,从而获取临时目标点对应位置(xtemp_g,ytemp_g)。
6、过滤机器人周边障碍物点云数据包括:移动机器人通过其搭载的激光雷达能够实时获取机器人周边设定范围内障碍物点云数据,对机器人点云数据进行相应过滤,选取局部避障需要范围内存在的障碍物点云数据,即获取移动机器人当前位置(xc,yc)与临时目标点位置(xtemp_g,ytemp_g)之间欧几里得距离distc_temp_g,在当前扫描障碍物点云数据中选取由机器人当前位置到临时目标点前向λ1distc_temp_g*λ1distc_temp_g矩形区域与反向λ1distc_temp_g*λ2distc_temp_g矩形区域内容障碍物点云集合{o1,o2,…,om},其中λ1>λ2>0。
7、获取临时目标点与移动机器人周边障碍点云集合对机器人引力与斥力集合是指人工势场法中通过建立一个虚拟势场,基于目标点对移动机器人的引力势场与障碍物对移动机器人的斥力势场形成的合势场,以设定行驶步长,引导移动机器人沿合力方向前进直至抵达目标点。
8、获取临时目标点与移动机器人周边障碍点云集合对机器人引力与斥力集合包括:
9、(1)、目标点对移动机器人的引力势场uatt为:
10、
11、其中,katt为引力尺度因子,ρ(xc,xg)表示移动机器当前位置xc与目标点xg之间欧几里得距离;
12、障碍物对移动机器人的斥力势场urep为:
13、
14、其中,krep是斥力尺度因子,ρ(xc,xo)表示移动机器人xc与障碍物xo之间的欧几里得距离,ρ0表示障碍物影响半径;
15、根据矢量运算法则,即可获得合势场u(x),有:
16、
17、(2)、引力与斥力分别为引力势场与斥力势场的负梯度,即目标点的引力势场对移动机器人产生的引力为:
18、fatt(x)=-kattρ(xc,xg)
19、障碍物的斥力势场对移动机器人产生的斥力为:
20、
21、根据矢量运算法则,即可获得合力f(x)大小及方向,通过在当前位置合力方向上乘以步长λ,即可确定移动机器人下一位置,重复合力计算,直至抵达目标点位置;
22、(3)、使用经典人工势场法时,可能存在目标点不可达情况,即当目标点附近存在障碍物时,障碍物对移动机器人的斥力过大,而目标点对机器人的引力相对较小,因而机器人很难直接抵达目标点;为解决目标点不可达问题,在斥力势场中引入移动机器人与目标点之间距离关系,则改进斥力势场函数为:
23、
24、则障碍物对移动机器人的斥力可表示与:
25、
26、其中,为障碍物指向移动机器人的力,有:
27、
28、为障碍物指向移动机器人的力,有:
29、
30、(4)、由于人工势场法主要关注局部信息,即以当前时刻目标点对移动机器人的引力与障碍物对移动机器人的斥力计算合力,同时在合力方向上乘以设定步长,从而获取下一时刻机器人位置,因而该方法容易陷入局部最优解问题,即某一时刻合力为零。为跳出局部最优解问题,对障碍物产生的斥力偏转角进行调整;
31、假设,移动机器人当前位置xc(xc,yc)受到临时目标点xtemp_g(xtemp_g,ytemp_g)对其产生的引力为fatt(xc),障碍物xo(xo,yo)对移动机器人所产生的斥力为frep(xc),则fatt(xc)与frep(xc)对应的偏转角分别为αatt与αrep,有:
32、
33、则fatt(xc)与frep(xc)在x,y轴方向分力分别为:
34、
35、其中,fatt_x,fatt_y分别为fatt(xc)在x,y轴方向上分力;frep_x,frep_y分别为frep(xc)在x,y轴方向上分力;
36、若当前时刻陷入局部最优情况,根据移动机器人与障碍物之间距离以及障碍物影响半径调整障碍物斥力对移动机器人的偏转角,从而克服局部最优问题,则frep(xc)在x,y轴方向分力分别调整为:
37、
38、其中,λ3为比例角度系数,主要与移动机器人与障碍物之间距离以及障碍物影响半径有关,可表示为:
39、△α为调整角,其中若机器人位于障碍物右侧,则△α>0,反之,△α<0。
40、机器人行驶过程中实时检测一定范围内动态障碍物影响,当存在障碍物处于移动机器人安全行驶路径范围时,即进入动态障碍物局部避障阶段,即在移动机器人沿全局规划路径朝向任务位置行驶过程中,通过机器人搭载的二维激光雷达实时获取移动机器人周围障碍物点云数据,包括全局地图下点云横纵坐标值,通过与移动机器人当前位置判断,实时检测设定距离范围内的障碍物点云是否处在移动机器人安全行驶范围内,移动机器人安全行驶范围是指保证移动机器人正常通过时,机器人边缘与障碍物之间存在安全距离;当移动机器人安全行驶范围内存在障碍物时,即进入动态障碍物局部避障阶段。
41、采用全局路径规划算法规划一条由移动机器人当前位置到任务位置之间的全局路径,全局路径规划算法包括:栅格地图下通过a*路径规划算法或拓扑地图下通过dijkstra最短路径算法搜索一条由移动机器人当前位置到任务位置的全局路径,同时基于贝塞尔曲线平滑或b样条平滑方法对全局路径进行整体平滑,使之适合移动机器人行驶,从而获取一条由移动机器人当前位置(xc,yc)到达任务位置(xg,yg)的全局路径点集{(xc,yc),(x1,y1),…,(xn,yn),(xg,yg)}。
42、基于已获取全局路径,通过pid等控制算法输出移动机器人控制参数,控制移动机器人各驱动轮转动速度,使之沿设定全局路径朝向任务位置稳定行驶。
43、本发明的优点在于:在机器人的移动路径上遇到障碍物后可以进行避障的同时还能快速返回到原始路径上继续进行移动,实现动态障碍物局部避障后继续沿全局路径朝向目标位置前进,从而能够有效提升移动机器人避障能力,提高移动机器人运输效率。在移动机器人沿全局路径行驶过程中,在移动机器人安全行驶范围存在动态障碍物时,即时规划局部路径,以规避当前行进范围内动态障碍物对移动机器人任务执行影响。本发明提出的方法能够克服经典人工势场法局部路径规划过程中存在的目标不可达与局部最优问题,能够有效提高移动机器人局部路径规划的鲁棒性,对提高机器人任务执行效率,降低运输成本具有实际的意义。
- 还没有人留言评论。精彩留言会获得点赞!