一种基于改进序列凸规划的变翼飞行器在线轨迹优化方法与流程
本发明属于航空航天技术中的轨迹设计与优化,涉及一种基于改进序列凸规划的变翼飞行器在线轨迹优化方法。
背景技术:
1、传统固定结构飞行器执行任务能力单一,在飞行包线内的气动性能并不能一直保持最优,而新增了变形结构的变翼飞行器,能够根据不同任务需求和飞行工况选择性能最佳的外形。因此,变翼飞行器成为解决这一问题的重要策略,并已引起各种研究机构和学者的广泛研究。
2、多维控制变量、强耦合性、强非线性使得变翼飞行器变形策略及轨迹规划这一类复杂最优控制问题的求解十分困难。现有变翼飞行器轨迹规划主要采用伪谱法及其改进方法,该类方法将问题变量离散化和参数化,并将最优控制问题转化为非线性规划问题(nonlinear programming,nlp),问题最优解可通过求解nlp问题数值解获得。但伪谱法存在复杂度高、计算量大和不易收敛的问题,导致计算耗时高,难以实现对轨迹的在线规划。凸优化具有快速且准确地直接求得凸问题全局最优解的特点,与伪谱法相比更加容易实现在线规划,近年来在飞行器轨迹优化领域受到广泛关注。凸优化方法中的无损凸化和序列凸规划算法广泛应用于运载火箭入轨、运载火箭垂直着陆和再入飞行器等轨迹规划领域,能够实现准确快速地在线规划。但是凸优化方法在变翼飞行器轨迹规划领域的适用性仍需充分研究应用。此外,变翼飞行器模型相较于传统固定结构飞行器更加复杂,现有方法对动力学模型的简化会导致求解精度的降低。
3、综上所述,现有方法仍存在:需要较大计算量、计算耗时长、难以实现在线轨迹优化,或是针对变翼飞行器适配性不足,未验证求解精度的问题。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种基于改进序列凸规划的变翼飞行器在线轨迹优化方法,将本发明方法运用于变翼飞行器轨迹优化,既达到了较高的求解精度,又拥有极高的求解速度,相对传统伪谱法更容易实现对轨迹的在线优化。
2、本发明解决技术的方案是:提出一种基于改进序列凸规划的变翼飞行器在线轨迹优化方法,包括以下步骤:
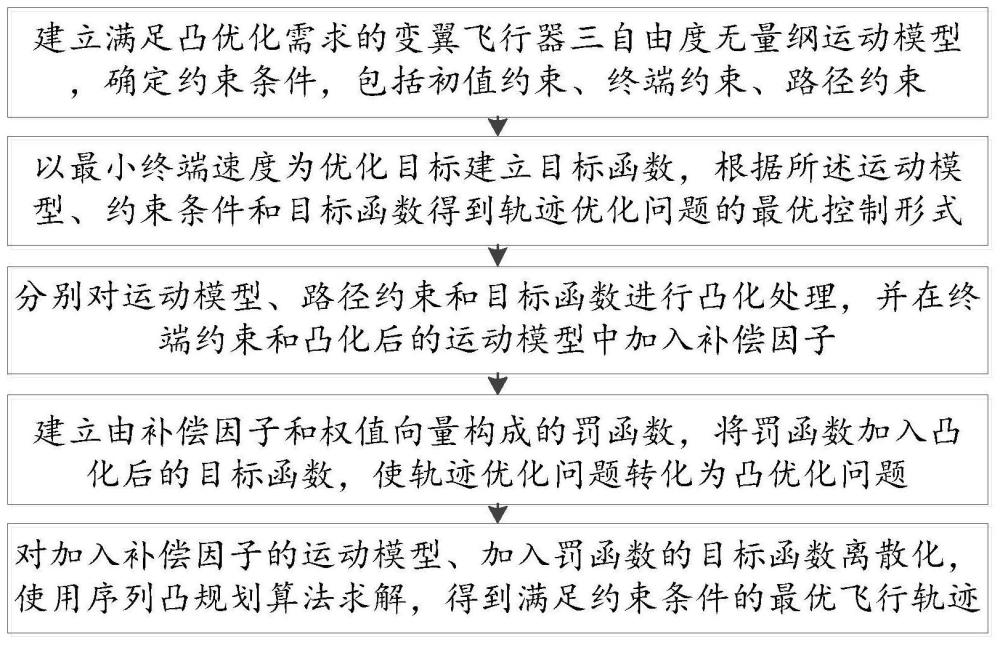
3、s1、建立满足凸优化需求的变翼飞行器三自由度无量纲运动模型,确定约束条件,包括初值约束、终端约束、路径约束;
4、s2、以最小终端速度为优化目标建立目标函数,根据所述运动模型、约束条件和目标函数得到轨迹优化问题的最优控制形式;
5、s3、采用一阶泰勒展开方法,分别对运动模型、路径约束和目标函数进行凸化处理,并在终端约束和凸化后的运动模型中加入补偿因子;
6、s4、建立由补偿因子和权值向量构成的罚函数,将罚函数加入凸化后的目标函数,使轨迹优化问题转化为凸优化问题;
7、s5、对加入补偿因子的运动模型、加入罚函数的目标函数离散化,使凸优化问题转化为序列凸规划问题,使用序列凸规划算法进行求解,得到满足约束条件的变翼飞行器最优飞行轨迹。
8、进一步的,步骤s1所述三自由度无量纲运动模型为:
9、
10、其中:r为飞行器与地心之间的距离,使用常量ls=r0进行无量纲化,r0为地球半径;θ为飞行器的地理经度;为飞行器的地理纬度;v为飞行器的飞行速度,使用常量进行无量纲化,g0为海平面引力加速度;γ为飞行器的航迹角;ψ为飞行器的航向角;α为攻角;σ为飞行器的倾侧角;χ为后掠角;t为飞行器的飞行时间,使用常量进行无量纲化;l为飞行器无量纲化后的升力加速度,d为飞行器无量纲化后的阻力加速度;
11、攻角变化率、倾侧角变化率和后掠角变化率构成控制变量向量u=[u1,u2,u3]t,并使用常量进行无量纲化;状态变量为
12、进一步的,步骤s1所述初值约束、终端约束分别为:
13、初值约束:
14、x(t0)=x0
15、其中,x0为初始时刻的状态变量,t0为初始时刻;
16、终端约束:
17、x(tf)=xf
18、其中,xf为终端时刻的状态变量,tf为终端时刻;
19、建立状态变量和控制变量约束为:
20、
21、式中:xmin为状态变量最小值,xmax为状态变量最大值;umin为控制变量最小值,umax为控制变量最大值。
22、进一步的,步骤s1所述路径约束包括热流密度约束p1(r,v)、动压约束p2(r,v)和过载约束p3(r,v,α,χ);
23、热流密度约束:
24、
25、式中:kq为与飞行器端头半径和材料有关的常数,ρ为大气密度,v·vs为真实飞行速度,为驻点热流密度的上界;
26、动压约束:
27、
28、式中:qmax为飞行器能承受的最大动压;
29、过载约束:
30、
31、式中:nmax为飞行器能承受的最大过载。
32、进一步的,步骤s2所述以最小终端速度为优化目标建立目标函数,具体为:
33、将目标函数j=v(tf)表示为最优控制问题中的标准形式:
34、
35、式中,m为mayer型目标函数;λ为积分型目标函数。
36、进一步的,步骤s2所述对运动模型进行凸化处理,包括:
37、将运动模型中的控制变量和状态变量解耦,表示为:
38、
39、式中:为状态矩阵,为控制矩阵,如下所示:
40、
41、
42、令第k次求解时的状态变量和控制变量分别为x(k)和u(k),对解耦后的运动模型在x(k)处线性化:
43、
44、式中:
45、
46、c(x(k))=f(x(k))-a(x(k))x(k)
47、式中,aij为解耦后的运动模型对状态变量求偏导的非零项;
48、对路径约束进行凸化处理,表示为:
49、
50、式中:
51、
52、
53、对目标函数进行凸化处理,表示为:
54、
55、添加信赖域约束:
56、|x-x(k)|≤δ
57、式中:δ为信赖域半径。
58、进一步的,步骤s3所述在终端约束和凸化后的运动模型中加入补偿因子,分别为:
59、在运动模型中加入补偿因子后表示为:
60、
61、式中:为运动模型补偿因子;
62、在终端约束中加入补偿因子后表示为:
63、-xtol≤x(tf)-xf≤xtol
64、式中:为9个状态变量的终端补偿因子。
65、进一步的,步骤s4所述罚函数为:
66、w=η·βt
67、式中:β=[xtol ξtol]为补偿因子向量,ξtol为运动模型补偿因子积分上界;分别为各个补偿因子向量元素对应的罚函数权值,当权值为零时,表示不对其进行补偿因子操作;
68、将罚函数加入凸化后的目标函数,具体为:
69、
70、进一步的,步骤s5所述序列凸规划问题,具体为:
71、均匀离散时域[t0,tf]为n个相等的时间间隔,使用所述时间间隔离散运动模型,得到:
72、
73、式中:i为9×9的单位矩阵,i=1,2,…,n表示第i个时间节点;
74、对目标函数进行离散,得到:
75、
76、式中:罚函数w中的ξtol离散为
77、将序列凸规划问题表示为标准形式:
78、p3:minlty
79、
80、dy=h
81、其中,lty表示离散后的目标函数;表示不等式约束;dy=h表示等式约束;y=(x0,x1,…,xn,u0,u1,…,un,ξ0,ξ1,…,ξn,β)为待优化变量,nd为转化成序列凸规划问题后的二阶锥约束的维度;其中,所述等式约束包含:离散的初值约束和运动模型,不等式约束包含:离散的状态变量和控制变量约束、终端约束、路径约束、信赖域约束。
82、进一步的,步骤s5所述使用序列凸规划算法进行求解,具体为:
83、步骤1:令k=0,初始化状态变量x(t0)=x0,设定常值控制变量u(t0)=u0,并根据运动模型生成初始轨迹x(0);
84、步骤2:当k>0时,对于第k次迭代,将前一次迭代得到的轨迹{x(k-1),u(k-1)}以及补偿因子β(k-1)代入所述序列凸规划问题并求解,得出此次迭代最优解{x(k),u(k)}以及补偿因子β(k);
85、步骤3:判断是否满足收敛条件:
86、
87、式中:为收敛阈值,k>1,若满足收敛条件,转至步骤4;若不满足收敛条件,返回步骤2;
88、步骤4:求出轨迹优化问题的最优解{x*=x(k),u*=u(k)}。
89、本发明与现有技术相比的有益效果是:
90、本发明对变翼飞行器轨迹优化问题进行了适合凸优化方法的建模,提出为尽可能避免出现“人为不可解”现象,在运动模型和终端约束中加入补偿因子,从而改善离散化后问题求解的收敛性,同时在目标函数中加入与补偿因子相关的罚函数,从而保证序列凸规划算法的求解精度,最终形成变翼飞行器轨迹改进序列凸规划在线求解方法,经与伪谱法对比,达到了在保证精度情况下远高于伪谱法的求解速度。
- 还没有人留言评论。精彩留言会获得点赞!