一种基于无人机全景感知的钢结构表面监测系统及方法与流程
本发明涉及钢结构检测,尤其是涉及一种基于无人机全景感知的钢结构表面监测系统及方法。
背景技术:
1、目前钢结构检测是建筑结构安全鉴定和工程质量评估的重要技术之一,通过对建筑物或构筑物进行现场调查、测试和分析,评定其安全性、可靠程度及结构的承载能力。由于依靠人工检测钢结构质量费时费力还不准确,因此一般工程单位都会使用设备去检测钢结构的各项信息。在钢结构检测中,对钢结构位置的检测非常重要,通过监测钢结构的位置可以判断钢结构是否符合预期,在经过一段时间后钢结构有无变形问题等。
2、上述中的现有技术方案存在以下缺陷:现在在用设备检测钢结构时需要工作人员带着检测设备去现场检测,费时费力,同时还有危险。
技术实现思路
1、为了远程检测钢结构,节省人工,规避危险,本技术提供一种基于无人机全景感知的钢结构表面监测系统及方法。
2、一方面,本技术提供的一种基于无人机全景感知的钢结构表面监测系统采用如下的技术方案:
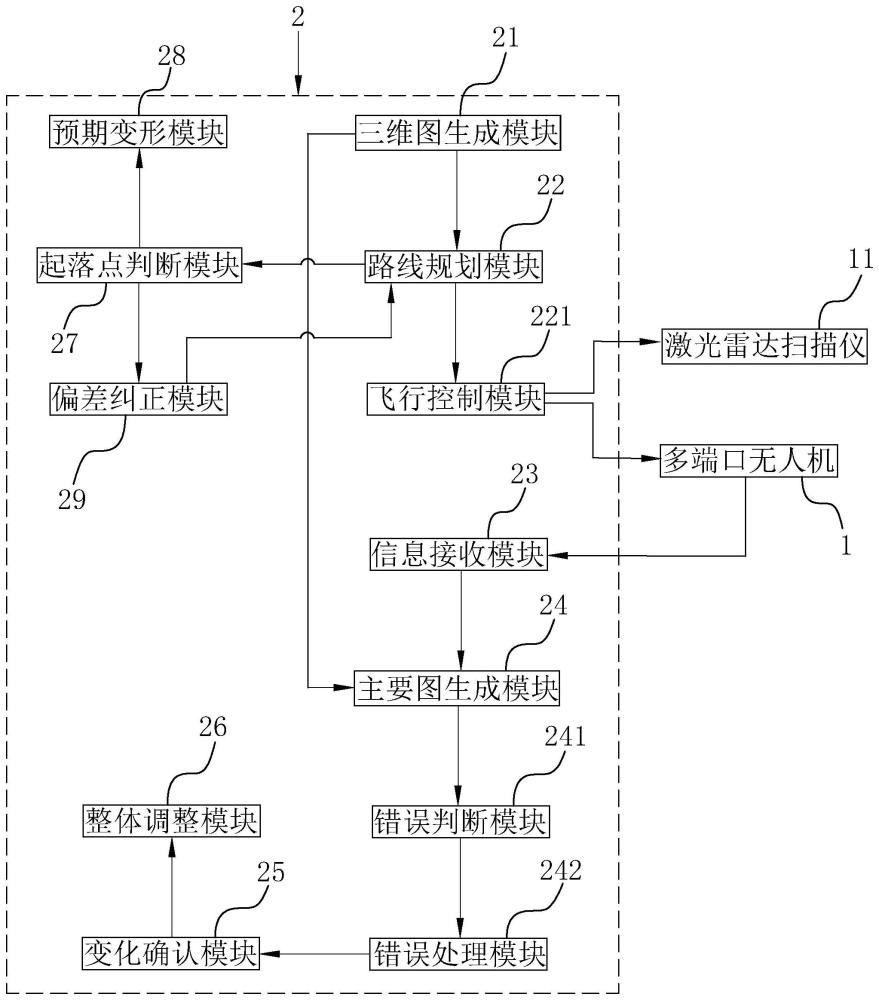
3、一种基于无人机全景感知的钢结构表面监测系统,包括多端口无人机和总控系统,多端口无人机安装有激光雷达扫描仪,所述总控系统包括三维图生成模块、路线规划模块、飞行控制模块、信息接收模块和主要图生成模块;
4、所述三维图生成模块接收导入的工程图,并根据工程图中钢结构坐标生成三维模型图,将三维模型图传输给路线规划模块;
5、所述路线规划模块预设有无人机扫描范围,路线规划模块将三维模型图中钢结构连接节点和支撑钢柱进行标记,根据无人机扫描范围和被标记坐标规划飞行路线,使得无人机扫描范围能够覆盖所有被标记坐标,在每处被标记坐标设置空间坐标靶点,将空间坐标靶点加入飞行路线内,将飞行路线传输给飞行控制模块;
6、所述飞行控制模块接收飞行路线后存储,当飞行控制模块接收外界输入的启动指令后将飞行路线发送给多端口无人机,控制激光雷达扫描仪对空间坐标靶点进行扫描;
7、所述信息接收模块接收多端口无人机发送的雷达扫描信息,并将雷达扫描信息传输给主要图生成模块;
8、所述主要图生成模块调用三维图生成模块生成的三维模型图,根据雷达扫描信息在三维模型图上绘制实际三维模型图,将实际三维模型图显示。
9、通过采用上述方案,系统根据工程图自动生成三维模型图,并在三维模型图上对主要钢结构进行标记,然后自动生成多端口无人机的飞行路线,使得多端口无人机按照飞行路线飞行时,激光雷达扫描仪能够扫描到所有的主要钢结构,并且系统主动控制激光雷达扫描仪针对被标记位置进行扫描,使得扫描结构更精准,系统获得扫描数据后就能够自动生成实际钢结构的三维模型图,工作人员通过实际钢结构的三维模型图即可了解当前钢结构的三维点信息,过程方便快捷,省时省力。
10、优选的,还包括错误判断模块和错误处理模块;
11、所述错误判断模块调用三维图生成模块的三维模型图和主要图生成模块的实际三维模型图,对比实际三维模型图与三维模型图中被标记坐标的位置,将实际三维模型图中位置发生变化的被标记坐标高亮显示,调用高亮坐标的坐标信息和检测时间并传输给错误处理模块;
12、所述错误处理模块存储接收到的坐标信息和检测时间,错误处理模块根据存储的坐标信息和检测时间绘制坐标变化图。
13、通过采用上述方案,系统能够自动对三维图中与工程预期不符的部分高亮标记,并且在多次检测后还能够绘制坐标变化图,方便用户直观地了解钢结构变形部分的位置和变形过程。
14、优选的,所述错误处理模块预设有变化幅度预警值,根据坐标变化图推算每个高亮坐标的坐标信息在预设时间内的变化,将推算结果加入坐标变化图,错误处理模块查找坐标变化图中超出变化幅度预警值的部分并标记,将标记后的坐标变化图显示。
15、通过采用上述方案,系统通过坐标变化图可以推测出钢结构变形的趋势,并自动将有可能出现危险的部分标出,方便用户查看,并及时作出维修等反应。
16、优选的,还包括变化确认模块和整体调整模块;
17、所述变化确认模块接收错误处理模块的坐标变化图,当坐标变化图中的所有被标记坐标的坐标信息均发生变化,变化确认模块检测每个被标记坐标的坐标信息的变化量,若每个被标记坐标的坐标信息的变化量均相同,则根据被标记坐标的坐标信息的变化量输出调整请求;
18、所述整体调整模块接收调整指令后接收变化确认模块的被标记坐标的坐标信息的变化量,根据变化量调整实际三维模型图中被标记坐标的坐标信息。
19、通过采用上述方案,如果扫描的结果中所有坐标整体偏移了相同数值,那么有可能是检测出现故障,则先将三维模型图中的所有坐标按照相同的偏移数值调回,输出一个调整后的三维模型图。
20、优选的,还包括起落点判断模块,所述起落点判断模块调用路线规划模块的三维模型图,根据飞行路线在三维模型图靠近飞行路线起止点位置处分别选择一个坐标点作为起始参考坐标点和终止参考坐标点,在无人机在出发时控制激光雷达扫描仪检测起始参考坐标点,在无人机飞行完毕时控制激光雷达扫描仪检测终止参考坐标点,若检测的起始参考坐标点和终止参考坐标点与设定的起始参考坐标点和终止参考坐标点不相同,则计算检测的起始参考坐标点和终止参考坐标点与设定的起始参考坐标点和终止参考坐标点的坐标差值,判断起始参考坐标点的坐标差值和终止参考坐标点的坐标差值是否相同,若相同则输出位置偏差信号,若不相同则输出检测错误信号。
21、通过采用上述方案,系统预设两个参考点作为无人机起落点的参考,保证无人机的起落点准确,从而增加无人机整个飞行过程航线的准确,进一步增加了检测精度。
22、优选的,还包括偏差纠正模块,所述偏差纠正模块接收起落点判断模块输出的位置偏差信号,当偏差纠正模块接收到位置偏差信号时,根据坐标差值对路线规划模块的飞行路线进行修正。
23、通过采用上述方案,当无人机的起飞点和降落点都偏离了预设目标点相同的距离,则有可能是飞行路线计算时产生了偏离,因此可以修正飞行路线,进一步增加检测的准确性。
24、优选的,还包括预期变形模块,所述预期变形模块接收错误处理模块的标记后的坐标变化图并按照时间存储,预期变形模块根据时间将存储的坐标变化图排序,从最早时间存储的坐标变化图开始抽取坐标变化图中代表推算结果的部分,并判断该坐标变化图之后的坐标变化图是否与推算结果相同,若相同,则删除抽取的坐标变化图,若不相同,则停止抽取坐标变化图并将与抽取的坐标变化图的推算结果不同的坐标变化图选出。
25、通过采用上述方案,系统能够验证坐标变化图中的推算结果的准确性,如果推算不准确,则将不准确的结果输出,让用户对坐标变化图进行适应性的修改。
26、另一方面,本技术提供的一种基于无人机全景感知的钢结构表面监测方法采用如下的技术方案:
27、一种基于无人机全景感知的钢结构表面监测方法,包括如上述所述的钢结构表面监测系统,包括以下步骤:
28、导入待检测区域的工程图,根据工程图绘制三维模型图;
29、标记三维模型图中钢结构连接节点和支撑钢柱;
30、根据无人机扫描范围和被标记坐标规划飞行路线,使得无人机扫描范围能够覆盖所有被标记坐标,在每处被标记坐标设置空间坐标靶点,将空间坐标靶点加入飞行路线内;
31、接收启动指令后根据飞行路线控制多端口无人机飞行,并控制激光雷达扫描仪对空间坐标靶点进行扫描;
32、获取激光雷达扫描仪扫描的雷达扫描信息;
33、根据雷达扫描信息在三维模型图上绘制实际三维模型图。
34、通过采用上述方案,远程遥控多端口无人机携带激光扫描雷达沿飞行路线飞行,使得激光扫描雷达的扫描结构更精准,获得扫描数据后就能够自动生成实际钢结构的三维模型图,工作人员通过实际钢结构的三维模型图即可了解当前钢结构的三维点信息,过程方便快捷,省时省力。
35、优选的,还包括以下步骤:
36、对比实际三维模型图与三维模型图中被标记坐标的位置,将实际三维模型图中位置发生变化的被标记坐标高亮显示;
37、根据存储的坐标信息和检测时间绘制坐标变化图;
38、根据坐标变化图推算每个高亮坐标的坐标信息在预设时间内的变化,将推算结果加入坐标变化图;
39、查找坐标变化图中超出变化幅度预警值的部分并标记,将标记后的坐标变化图显示;
40、将标记后的坐标变化图按照时间存储;
41、将存储的坐标变化图排序,从最早时间存储的坐标变化图开始抽取坐标变化图中代表推算结果的部分,并判断该坐标变化图之后的坐标变化图是否与推算结果相同;
42、若相同,则删除抽取的坐标变化图;
43、若不相同,则停止抽取坐标变化图并将与抽取的坐标变化图的推算结果不同的坐标变化图选出。
44、通过采用上述方案,能够自动对三维图中与工程预期不符的部分高亮标记,并且在多次检测后还能够绘制坐标变化图,通过坐标变化图可以推测出钢结构变形的趋势,并自动将有可能出现危险的部分标出,方便用户查看,
45、优选的,还包括以下步骤:
46、当坐标变化图中的所有被标记坐标的坐标信息均发生变化时,检测每个被标记坐标的坐标信息的变化量;
47、若每个被标记坐标的坐标信息的变化量均相同,则根据变化量调整实际三维模型图中被标记坐标的坐标信息。
48、通过采用上述方案,如果扫描的结果中所有坐标整体偏移了相同数值,那么有可能是检测出现故障,则先将三维模型图中的所有坐标按照相同的偏移数值调回,输出一个调整后的三维模型图。
49、综上所述,本发明具有以下有益效果:
50、1. 远程遥控多端口无人机携带激光扫描雷达沿飞行路线飞行,使得激光扫描雷达的扫描结构更精准,获得扫描数据后就能够自动生成实际钢结构的三维模型图,工作人员通过实际钢结构的三维模型图即可了解当前钢结构的三维点信息,过程方便快捷,省时省力。
51、2. 能够自动对三维图中与工程预期不符的部分高亮标记,并且在多次检测后还能够绘制坐标变化图,通过坐标变化图可以推测出钢结构变形的趋势,并自动将有可能出现危险的部分标出。
- 还没有人留言评论。精彩留言会获得点赞!