一种用于降低植保无人机喷施作业飘移风险的方法
本发明涉及无人机作业领域,具体为一种用于降低植保无人机喷施作业飘移风险的方法。
背景技术:
1、植保无人机是一种利用超低容量喷施技术进行病虫害防治的新型设备,具有施药效率高、节省农药和水资源等优点。然而,由于植保无人机的作业高度较高,受环境风速的影响较大,导致药物雾滴在空中飘移的现象尤为严重,不仅降低了药物的利用率,还可能危及到周围的敏感作物、非靶标生物和人类的健康。
2、目前解决雾滴飘移问题主要分为两种方法,一种是控制飞行高度与速度以减少飘移,二是在药剂中添加助剂,提高雾滴的抗飘移、抗蒸发性能,其中,第一种方法并没有从本质上改善雾滴的飘移现象,并且牺牲了植保无人机作业的速度和效率。第二种方法在某些特定药剂中,取得了一定的防飘移效果:例如在无人机喷施棉花脱叶剂试验中,在棉花脱叶剂中添加了防飘移能力较好的倍倍加、飞手宝助剂,结果表明添加助剂可以使得雾滴的沉积密度提高,从而减少了雾滴的飘移。通过添加助剂或者改变药剂类型来改善飘移方法,其本质是提高雾滴的喷雾粒径,粒径较大的雾滴不易受自然环境的影响,可以沉积在靶标作物。
3、然而,国内市场现有剂型难以满足飞防实际需求。目前,国内真正专门用于植保无人飞机施药的农药制剂、助剂还没有登记生产,仍然属于空白阶段。植保无人机需要采用沉降性好、安全性高的专用药剂,但目前这一类超低容量制剂仍较少,选择性也差,成为提升作业效益的瓶颈。国内飞防助剂市场亟待系统化和规范化。目前,我国对农药助剂管理还未正式提出明确的规定和要求,市面上的产品性能差异显著。使用助剂来减少雾滴飘移的方法仍不成熟且不稳定,缺少相关标准,实际应用时难以达到预期效果。
4、为此,亟需一种无人机喷施方法,不仅可以解决现有无人机施药的雾滴飘移问题,而且还可以尽可能地保证无人机的喷施范围,避免无人机频繁返航以补充药液,从而提高无人机的喷施效率。
技术实现思路
1、本发明为了克服现有技术存在的不足,提供了一种用于降低植保无人机喷施作业飘移风险的方法,所述方法可以解决现有无人机施药的雾滴飘移问题,在提高雾滴利用率的同时减少对邻近作、牲畜以及人的危害;同时,所述方法还可以保证无人机的喷施范围,避免无人机频繁返航以补充药液,从而保证无人机的喷施范围和喷施效率。
2、本发明解决上述技术问题的技术方案是:
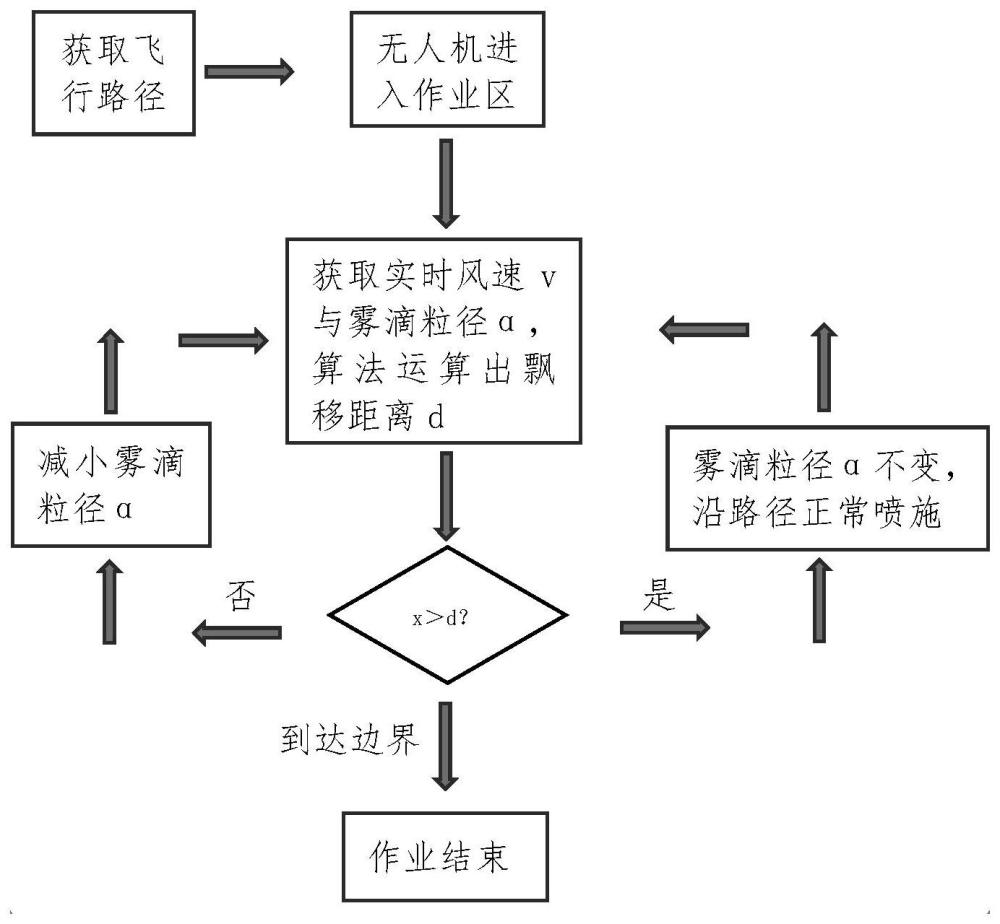
3、一种用于降低植保无人机喷施作业飘移风险的方法,包括以下步骤:
4、s1:获取无人机在作业区域中喷施药物时的飞行路径;
5、s2:获取无人机的实时位置,并计算其与边界之间的边界距离x;
6、s3:获取无人机在作业区域中的实时环境风速v和相对靶标作物冠层的高度h;
7、s4:获取喷施的雾滴粒径α;
8、s5:基于雾滴粒径α和实时环境风速v,相对靶标作物冠层的高度h与喷药飘移距离d的关系,获取喷药飘移距离d;
9、s6、根据雾滴飘移距离d和边界距离x进行比较,根据比较结果,执行不同的变粒径喷药策略:其中,所述变粒径喷药策略为:
10、若雾滴飘移距离d小于边界距离x,则保持喷施粒径不变;
11、若雾滴飘移距离d大于或等于边界距离x,则增大喷施粒径,使得调整后的喷药飘移距离d小于边界距离x。
12、优选的,在步骤s2中,通过无人机搭载的定位模块来获取无人机与作业区域的边界之间的边界距离d;通过无人机搭载定高模块来获取无人机相对靶标作物冠层的高度h。
13、优选的,在步骤s3中,通过无人机搭载的横向风速获取模块来获取无人机作业时的实时环境风速v。
14、优选的,在步骤s4中,通过无人机搭载的喷施模块来接收处理模块发送的药物粒径数据,进行变粒径的药物雾滴喷施。
15、优选的,所述风速获取模块采用风速传感器;所述处理模块采用微处理器,所述喷施模块采用变粒径式雾化装置,通过控制所述变粒径式雾化装置中的离心电机的转速,实现变粒径的药物雾滴喷施。
16、优选的,在步骤s5中,需要先获取所述雾滴粒径α和环境风速v与喷药飘移距离d之间的关系,具体为:
17、测算出不同粒径的同种药物在不同风速环境和不同高度下的飘移距离;
18、根据以上计算得到药物雾滴飘移距离d与雾滴粒径大小α、无人机相对靶标作物冠层的高度h和环境风速v之间的函数关系:d=f(α,v,h)。
19、优选的,在步骤s6中,当环境风速v大于预设阀值时,则停止作业。
20、本发明与现有技术相比,具有如下优点和有益效果:
21、1、本发明的用于降低植保无人机喷施作业飘移风险的方法可以根据药物雾滴飘移距离与雾滴粒径大小、无人机相对靶标作物冠层的高度和环境风速之间的函数关系,通过计算实时的边界距离、对靶标作物冠层的高度与环境风速,自动地改变喷施的雾滴粒径大小,使得无人机在喷施药物时的雾滴飘移量在允许范围内。
22、2、本发明的用于降低植保无人机喷施作业飘移风险的方法可以根据实时的位置信息、高度信息与风速信息,自动地改变喷施的雾滴粒径大小,使得无人机在喷施药物时雾滴尽量少的飘移到靶标作物外,提高雾滴利用率的同时还可以减少对邻近作物、牲畜以及人的危害。
23、3、本发明的用于降低植保无人机喷施作业飘移风险的方法可以根据实时的位置信息、高度信息与风速信息,自动地改变喷施的雾滴粒径大小,在保证无人机在喷施药物时雾滴尽量少的飘移到靶标作物外的同时,还尽可能的减少药液的损耗量,避免无人机频繁返航以补充药液,从而保证无人机的喷施范围和喷施效率。
技术特征:
1.一种用于降低植保无人机喷施作业飘移风险的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,在步骤s2中,通过无人机搭载的定位模块和定高模块来获取无人机与作业区域的边界之间的边界距离d和相对靶标作物冠层的高度h。
3.根据权利要求2所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,在步骤s3中,通过无人机搭载的横向风速获取模块来获取无人机作业时的实时环境风速v。
4.根据权利要求3所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,在步骤s4中,通过无人机搭载的喷施模块来接收处理模块发送的药物粒径数据,进行变粒径的药物雾滴喷施。
5.根据权利要求4所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,所述风速获取模块采用风速传感器;所述处理模块采用微处理器,所述喷施模块采用变粒径式雾化装置,通过控制所述变粒径式雾化装置中的离心电机的转速,实现变粒径的药物雾滴喷施。
6.根据权利要求4所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,在步骤s5中,需要先获取所述雾滴粒径α和环境风速v与喷药飘移距离d之间的关系,具体为:
7.根据权利要求4所述的用于降低植保无人机喷施作业飘移风险的方法,其特征在于,在步骤s6中,当环境风速v大于预设阀值时,则停止作业。
技术总结
本发明公开了一种用于降低植保无人机喷施作业飘移风险的方法,首先获取无人机在作业区域中喷施药物时的飞行路径;获取无人机的实时位置,并计算边界距离x;获取无人机在作业区域中相对靶标作物冠层的高度h,横向风速v和喷施的雾滴粒径α;基于雾滴粒径α和环境风速v、相对靶标作物冠层的高度h与喷药飘移距离d的关系,获取喷药飘移距离d;根据雾滴飘移距离d和边界距离x进行比较,若雾滴飘移距离d小于边界距离x,则保持喷施粒径不变;若大于或等于边界距离x,则增大喷施粒径,使得调整后的喷药飘移距离d小于边界距离x。本发明可以解决现有无人机施药的雾滴飘移问题,在提高雾滴利用率的同时减少对邻近作物、牲畜以及人的危害。
技术研发人员:陈鹏超,马昊然,兰玉彬,刘寒冰,廖健宏,廖家鹏,梁明
受保护的技术使用者:华南农业大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!