多架无人机任务协同轨迹优化方法
本发明涉及无人机数据采集方法领域,具体地说,是一种多架无人机任务协同轨迹优化方法。
背景技术:
1、目前,无人机在无线传感器数据采集方面得到了广泛的应用,这些应用包括环境监测、现场搜索、无人区勘探等。相比固定基站和传感器之间多跳的通信传输方案,采用无人机采集数据的方案具有成本低、机动性强、操作灵活、隐蔽性高、部署简单的优势。
2、为了达到采集任务完成时效性等要求,多架无人机数据采集也引起了广泛的研究,但灾区环境下,环境信息呈现动态变化的特点,传感器节点可能出现损坏导致数据丢失,或出现突发情况数据增加的情况。此时,仅依靠对任务区域的划分可能不会出现理想的无人机任务分配结果。针对数据动态变化的任务协同,不少研究考虑了传感器位置发生变化的任务协同过程,但没有综合考虑传感器数据量变化对无人机协同方案的影响。因此,提出多无人机协同数据采集的轨迹优化方案具有很好的实际意义。
技术实现思路
1、本发明的目的在于提供一种多架无人机任务协同轨迹优化方法。
2、实现本发明目的的技术解决方案为:一种多架无人机任务协同轨迹优化方法,包括以下步骤:
3、第一步,构建状态函数用来表示无人机对自身完成任务情况的估算,构建任务代价函数用来表示无人机提供任务协助的代价;
4、第二步,采用协助任务选择算法,确定需要协助的任务;
5、第三步,采用基于协作的两架无人机协同算法对第二步确定的任务更新无人机的任务分配及飞行轨迹。
6、进一步地,所述第一步构建状态函数和任务代价函数的具体实现步骤如下:
7、1.1状态函数,用于表示无人机对自身完成任务情况的估算,用fj(t)表示如下;
8、
9、其中,α、β为权重函数,bj(t)表示无人机uj在t时刻已采集完的传感器数量,nj表示初始分配给无人机uj的传感器数量,cj(t)表示无人机uj在t时刻已采集完的数据,表示初始分配给无人机uj的传感器数据量总和。
10、cj(t)表示为
11、
12、表示为
13、
14、bj(t)与cj(t)的关系表示为
15、
16、1.2任务代价函数,用表示采集过程中完成任务si的无人机发生变化产生的代价;
17、其中,cij[bj]表示传感器si的数据由无人机uj采集时,无人机uj的采集时间变化。无人机uj增加传感器si时,
18、
19、无人机uj减少传感器si时,
20、
21、举例说明,若无人机u1的初始采集传感器集合中增加传感器si,有
22、
23、对于无人机u2,则相应的减去传感器si,有
24、
25、若无人机u1的采集任务减去传感器si,有
26、
27、对于无人机u2,则相应的增加传感器si,有
28、
29、其中,表示无人机u1按预计轨迹完成采集任务的时间,表示无人机u1在预定轨迹的基础上增加采集传感器si后重新规划轨迹后最小采集时间,表示无人机u1在预定轨迹的基础上减少传感器si后重新规划轨迹后的最小采集时间,对于或的计算,由于n的规模不大。采用动态规划求解tsp的算法,快速求得该结果,根据结果更新b1、b2;
30、进一步地,步骤2所述采用协助任务选择算法,具体实现如下:
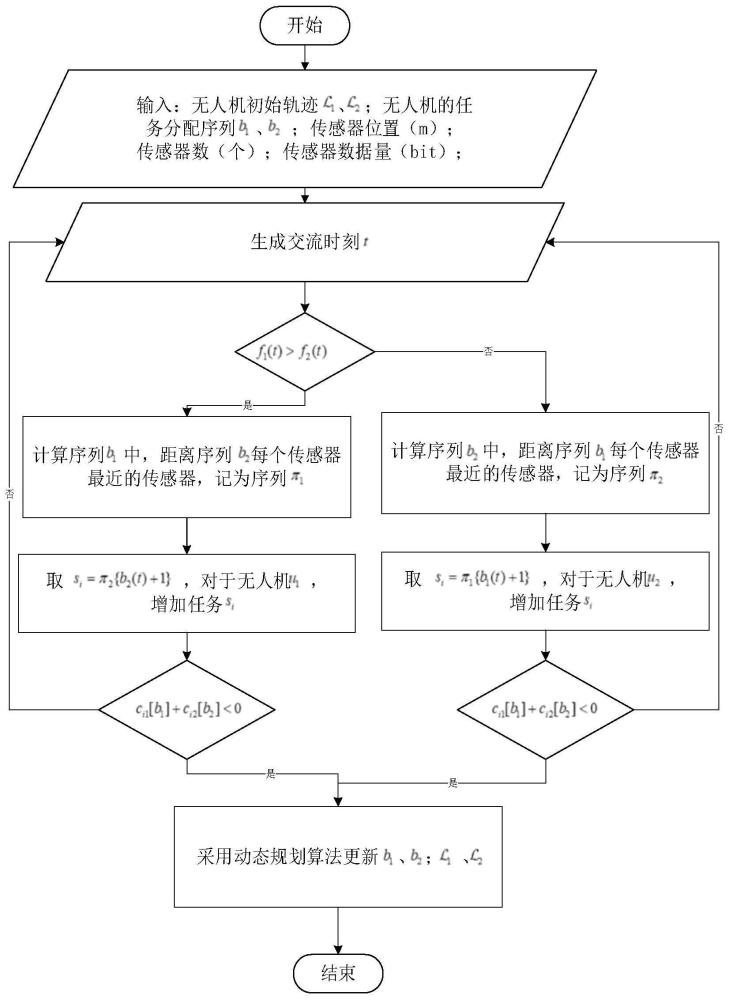
31、2.1各传感器分布在akm×akm的矩形范围内,预估传感器存储的数据量ln,无人机的固定飞行高度为h米,无人机的初始飞行轨迹由采用解决mtsp问题的多种群遗传算法生成;
32、2.2对任务时刻t,计算序列b1距离序列b2是每个传感器最近的传感器,记为π1;计算序列b2距离序列b1中每个传感器最近的传感器,记为π2。
33、2.3对于无人机uj,若j=1,则si=π2{b2(t)+1};若j=2,则si=π1{b1(t)+1}。
34、进一步地,步骤三采用基于协作的两架无人机协同算法对任务更新无人机的任务分配及飞行轨迹:
35、3.1随机产生任务时刻t;
36、3.2若f1(t)>f2(t),则对于无人机u1,增加任务si;否则,执行步骤3.4;
37、3.3在步骤3.2的基础上,若ci1[b1]+ci2[b2]<0,则采用动态规划算法更新b1、b2;否则,返回步骤3.1;
38、3.4对于无人机u2,增加任务si;
39、3.5若ci1[b1]+ci2[b2]<0,则采用动态规划算法更新b1、b2;否则,返回步骤3.1。
40、本发明与现有技术相比,其显著优点为:针对传感器节点可能出现损坏导致数据丢失,或出现突发情况数据增加的情况,采用本发明提供的协作算法,确定无人机之间在不同时机下的最优协作任务,通过无人机的任务协助有效缩短任务完成时间。
技术特征:
1.一种多架无人机任务协同轨迹优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的构建状态函数及任务代价函数,其特征在于,第一步构建状态函数和任务代价函数的具体实现步骤如下:
3.根据权利要求1所述的多架无人机任务协同轨迹优化方法,其特征在于,所述任务协助算法,具体实现如下:
4.根据权利要求1所述的多架无人机任务协同轨迹优化方法,其特征在于,采用基于协作的两架无人机协同算法对第二步确定的任务更新无人机的任务分配及飞行轨迹,具体实现如下:
技术总结
本发明公开了一种多架无人机任务协同轨迹优方法。该方法针对传感器节点可能出现损坏导致数据丢失,或出现突发情况数据增加的情况,存在多无人机任务分配不均匀的问题,以多架无人机任务时间最小化为目标,建立数据预估误差下的任务时间优化问题模型,设计了一种基于协作的多无人机协同轨迹优化算法。该方法可以在完成预期任务的前提下减少任务完成时间。
技术研发人员:朱磊,赵文栋,徐正芹,彭来献,解其乐
受保护的技术使用者:中国人民解放军陆军工程大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!