观测器设计方法、观测器、存储介质、观测装置和智能体
本技术属于多智能体控制,尤其涉及观测器设计方法、观测器、存储介质、观测装置和智能体。
背景技术:
1、多智能体系统(mas)是多个智能体组成的集合,每个智能体都具有独立性和自主性,且能够自主地推理、规划并选择适当的控制策略,智能体之间的协同非常重要,这会影响整个多智能体系统的性能和稳定性,近年来,多智能体系统的协同控制取得了显著的进展,这是因为它们广泛应用于各种领域,包括飞机、车辆、船舶、卫星、机器人等。多智能体的控制涉及协同输出调节方法,其主要目标是同时渐近跟踪外部系统状态并有效抑制来自环境的干扰,因此,协同输出调节的重要性已经被越来越多的人认识到,它提供了一个可行的解决方案来处理多智能体系统中出现的不确定性和干扰因素,通过多智能体间的协同控制,各智能体之间能够进行通讯、合作、协调、调度等等,从而实现多智能体的具体功能或行为,如飞行编队控制、多车辆协调、微网电力平衡等。
2、智能体之间的协同输出调节是多智能体系统的核心问题之一,如现有文献“姚永琪.不确定环境下多智能体协同路径追踪[d].杭州电子科技大学,2023”公开了一种在不确定环境的条件下多智体协同路径追踪的方案,而实现协同控制,需要每一个跟随者均能够得到外部系统(即领航者)的状态信息,这些信息可以通过数据链进行传输,然而实际上大多数情况中,跟随者不能获取领航者的状态信息,相互不能通信,这就导致跟随者不能实时跟踪领航者的行为或运动,进而无法完成多智能体的协同控制,所以需要设计观测器获取多智能体系统状态。
技术实现思路
1、本技术旨在一定程度上解决现有技术多智能体系统的跟随者无法获取领航者状态信息的技术问题,为此,本技术提供了观测器设计方法、观测器、存储介质、观测装置和智能体,能够让跟随者通过其他跟随者对领航者状态进行估计,获得领航者的状态信息,从而实时跟踪领航者,使多智能体系统能够完成协同控制。
2、第一方面,本技术提供一种观测器设计方法,其包括以下步骤:
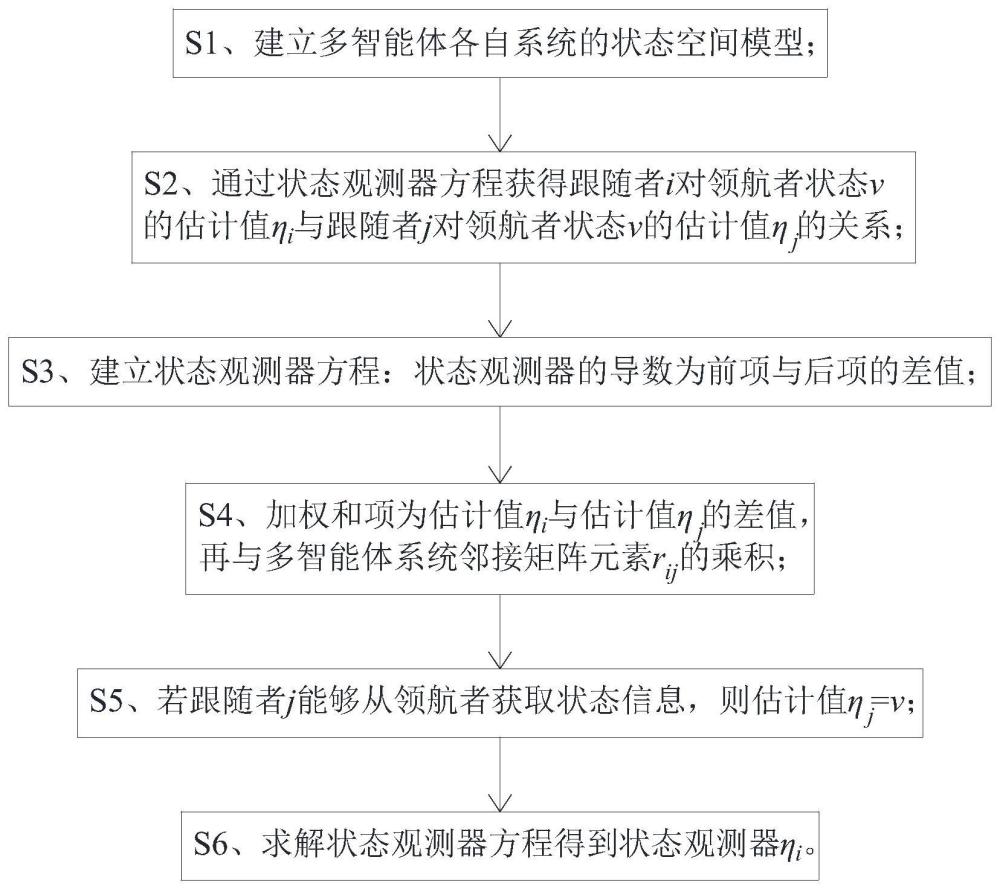
3、s1.建立多智能体各自系统的状态空间模型;
4、s2.确定第i个跟随者,通过状态观测器方程获得跟随者i对领航者状态v的估计值ηi与其他跟随者j对领航者状态v的估计值ηj的关系,跟随者i能够从跟随者j获取状态信息;其中,i、j为多智能体的编号,领航者编号i=0,跟随者编号i,j≥1;
5、s3.建立状态观测器方程:状态观测器的导数为前项与后项的差值;其中,前项为领航者系统矩阵与估计值ηi的乘积,后项为观测器增益与加权和项的乘积;
6、s4.加权和项为估计值ηi与估计值ηj的差值,与多智能体系统邻接矩阵元素rij的乘积;
7、s5.若跟随者j能够从领航者获取状态信息,则估计值ηj=v;
8、s6.求解状态观测器方程得到状态观测器ηi。
9、现有技术的多智能体系统,实际在大多数情况中,跟随者都不能获取领航者的状态信息,这是由于跟随者与领航者之间不能通信,且每一个智能体无法获知整个多智能体系统的通信拓扑结构。而本技术通过建立多智能体系统的状态空间模型,使各智能体之间具有交互,能够传递数据,利用状态观测器能够将跟随者i与其他跟随者j之间建立联系,使跟随者j能够将估计值传递至建立通信连接的智能体,且不需要与其他不能获取状态信息的智能体进行交互,这样将问题进行转化并能够进行迭代,方便运算,再通过建立状态观测器方程,直接将领航者的系统矩阵、多智能体系统邻接矩阵以及跟随者对领航者的状态估计值联系起来,从而实现对多智能体系统中领航者状态的获取,只需与建立通信连接的智能体进行通信,就能让跟随者通过其他跟随者对领航者状态进行估计和观测,获得领航者的状态信息,从而实时跟踪领航者,使多智能体系统能够完成协同控制。
10、在可选实施方式中,多智能体的第i个跟随者对领航者状态v的状态估计值ηi通过下列状态观测器获得:
11、
12、η0=v
13、其中,s为领航者的系统矩阵,n为跟随者数量,rij为加权邻接矩阵的元素,γ为观测器增益,和时间相关,η0为领航者对自己的状态估计值,v为领航者的状态。
14、在可选实施方式中,观测器增益γ为:
15、
16、其中,α3、α5均为待设计参数,α5=2α1α4(1-α3),n为每个跟随者的状态向量的维数,δc为待设计常数,且大于等于1,t1为多智能体的收敛时间,γ0为γ的最小值。
17、在可选实施方式中,多智能体的收敛时间为
18、
19、在可选实施方式中,确定观测器增益γ时,通过α3调节收敛时间t1,以改变多智能体系统的收敛时间。
20、在可选实施方式中,多智能体系统邻接矩阵rij满足:
21、
22、第二方面,本技术提供一种观测器,其通过上述的多智能体系统的观测器设计方法获得,观测器包括求解状态观测器方程的解对应的计算方法。采用了观测器设计方法求解出的观测器,是完全分布式的,只依赖于建立通信连接的多智能体,而不需要提前知道整个多智能体系统的拓扑结构,即拉普拉斯矩阵是未知的情况,这样能够在信息获取有限的情况下,对领航者状态进行估计,进而作出动作,实现跟随者实时跟踪领航者。
23、第三方面,本技术提供一种存储介质,存储介质中存储有程序、指令或代码,程序、指令或代码包括上述的观测器。通过存储介质能够储存观测器的计算方法,进而能够通过执行程序、指令或代码实现对领航者的状态的估计。
24、第四方面,本技术提供一种观测装置,其包括上述的存储介质、处理器和硬件模块,存储介质和处理器集成于硬件模块,存储介质中的程序、指令或代码由处理器执行。通过观测装置能够直接估计对领航者的状态,进而能够将领航者的状态估计值直接传输至跟随者,指示跟随者即将作出的动作。
25、第五方面,本技术提供一种智能体,智能体带有控制器、执行机构和通信装置,控制器用于运行控制程序、指令或代码,控制程序、指令或代码包括上述的观测器设计方法,执行机构用于执行控制程序,通信装置用于多智能体之间的信息传输。该智能体通过执行控制程序,能够利用多智能体系统的观测器,获取对领航者状态的估计,进而指示跟随者,使跟随者能够始终跟随领航者的状态,实现多智能体之间的协同工作。
26、由上述技术方案可知,本技术的有益效果为:
27、1、本技术的观测器设计方法,通过建立多智能体系统的状态空间模型,使各智能体之间具有交互,能够传递数据,利用状态观测器能够将跟随者i与其他跟随者j之间建立联系,使跟随者j能够将估计值传递至建立通信连接的智能体,且不需要与其他不能获取状态信息的智能体进行交互,这样将问题进行转化并能够进行迭代,方便运算,再通过建立状态观测器方程,直接将领航者的系统矩阵、多智能体系统邻接矩阵以及跟随者对领航者的状态估计值联系起来,从而实现对多智能体系统中领航者状态的获取,只需与建立通信连接的智能体进行通信,就能让跟随者通过其他跟随者对领航者状态进行估计和观测,获得领航者的状态信息,从而实时跟踪领航者,使多智能体系统能够完成协同控制。
28、2、本技术的观测器,采用了观测器设计方法,是完全分布式的,只依赖于建立通信连接的多智能体,而不需要提前知道整个多智能体系统的拓扑结构,即拉普拉斯矩阵是未知的情况,这样能够在信息获取有限的情况下,对领航者状态进行估计,进而作出动作,实现跟随者实时跟踪领航者。
29、3、本技术的存储介质,能够储存观测器的计算方法,进而能够通过执行程序、指令或代码实现对领航者的状态的估计。
30、4、本技术的观测装置,能够直接估计对领航者的状态,进而能够将领航者的状态估计值直接传输至跟随者,指示跟随者即将作出的动作。
31、5、本技术的智能体,通过执行控制程序,能够利用多智能体系统的观测器,获取对领航者状态的估计,进而指示跟随者,使跟随者能够始终跟随领航者的状态,实现多智能体之间的协同工作。
- 还没有人留言评论。精彩留言会获得点赞!