基于AFSA与DWA融合算法的机器人路径规划方法及机器人与流程
本发明涉及机器人路径规划,具体为基于afsa与dwa融合算法的机器人路径规划方法及机器人。
背景技术:
1、迈步掘进机器人路径规划是煤矿行业中一项关键的技术,它涉及到在煤矿迈步等复杂环境中移动机器人的路径选择和规划。煤矿迈步环境具有狭窄、曲折、不平等特点,并且常常存在着各种障碍物和危险因素,如岩石块、煤尘、有毒气体等。
2、在过去,传统的迈步掘进移动机器人路径规划方法往往基于简单的规则或经验,缺乏对环境的准确感知和全局优化能力。这导致了路径的低效和安全性的不足。此外,由于煤矿中的环境条件时常变化,传统方法也难以应对动态环境的路径规划需求。
3、因此,为了提高迈步掘进机器人的路径规划效果,研究人员开始探索基于智能算法的路径规划方法。这些智能算法包括遗传算法、人工神经网络、模糊逻辑等。近年来,越来越多的研究将自然启发式算法引入煤矿迈步移动机器人路径规划中,以提高路径规划的效率和质量。
4、迈步掘进机器人路径规划的背景可以总结为:传统方法对复杂环境的规划效果不佳,无法适应动态变化的条件,而引入智能算法可以提供更好的全局优化和适应性,从而提高机器人的路径选择和规划能力,这将有助于提高煤矿安全性和生产效率。
5、如申请号为201711243731.9的中国发明专利申请公开一种基于改进afsa的移动机器人路径规划方法,上述方案提出基于惯性权重的自适应行为,平衡算法的全局搜索能力与局部搜索能力,提高算法的优化精度。
6、然而,在依靠改进的afsa算法对机器人的路径规划过程中,当机器人的目标点保持不变时,最优邻域的目标点密度会降低,进而导致算法的收敛速度减慢,路径规划时间增加;另外,在复杂的地下环境中,单独基于afsa算法规划的全局路径信息中往往还会存在较多的角度转折点和冗余点,规划的路径往往过于冗长且不平坦。
技术实现思路
1、本发明的目的在于提供基于afsa与dwa融合算法的机器人路径规划方法及机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于afsa与dwa融合算法的机器人路径规划方法,包括如下步骤:
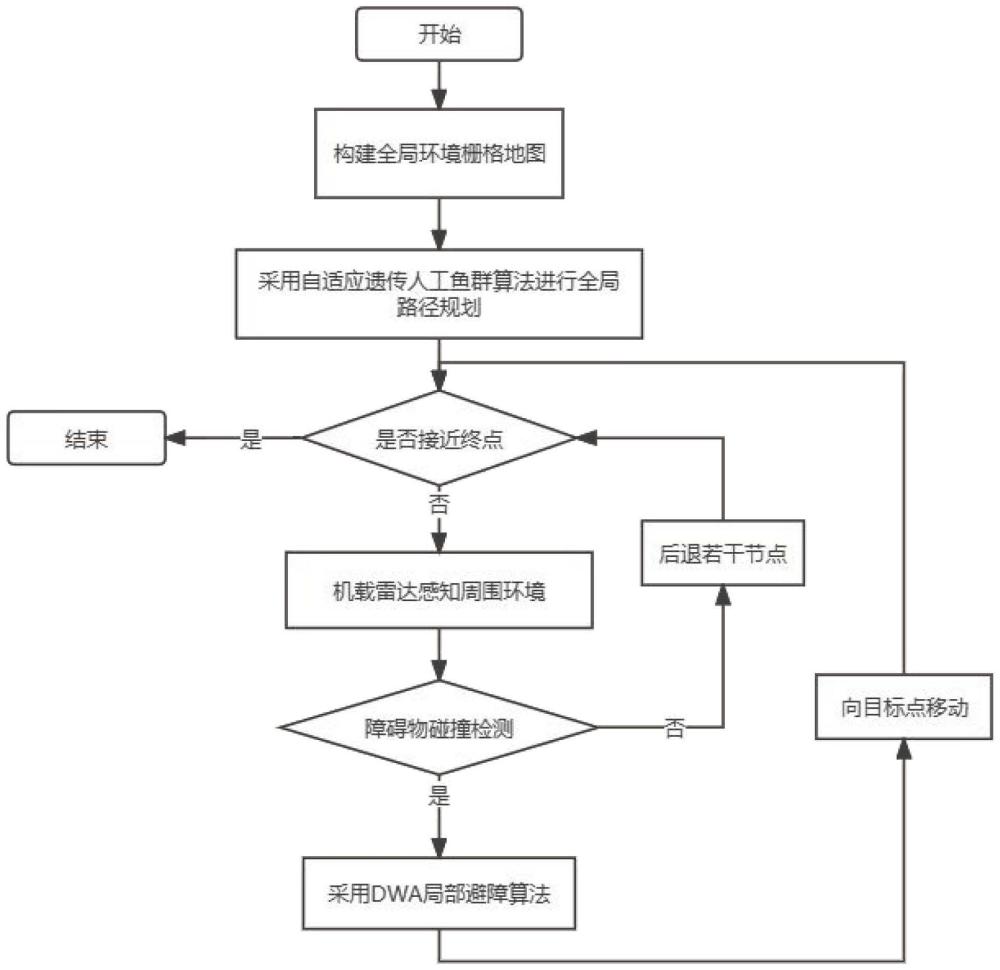
4、s1、通过机器人四周安装的机载雷达对四周环境进行扫描,构建全局环境栅格地图;
5、s2、判断机器人当前位置是否接近终点,若接近,则机器人的迈步运动完成;若不接近,进入下一步;
6、s3、采用自适应遗传人工鱼群算法对机器人迈步的全局路径进行规划,自适应遗传人工鱼群算法包括自适应人工鱼群算法和遗传算法;
7、s4、通过机器人四周安装的机载雷达感知周围环境,进行碰撞预测,若预测发生碰撞,机器人倒退若干运动节点,并重新进入步骤s2;若预测未发生碰撞,进入下一步;
8、s5、基于步骤s3规划的全局路径,采用机器人局部避障的动态窗口算法对机器人迈步的局部路径进行规划,机器人按照规划的局部路径向目标点迈步运动,接着,重新进入步骤s2。
9、优选地,所述全局环境栅格地图的构建方法为:获取每一帧机载雷达数据和该帧对应的机器人位置,计算该帧机器人位置的栅格序号;
10、遍历该帧机载雷达数据的所有扫描点,计算每一个激光扫描点击中的栅格在像素坐标系下的栅格序号;
11、从当前机器人位置的栅格序号到激光扫描点的栅格序号进行划线,找出所有空闲的栅格序号;
12、遍历所有空闲的栅格,更新空闲栅格状态;
13、更新激光扫描点击中的栅格状态,重复前述步骤,由此循环,完成全局环境栅格地图的构建。
14、优选地,所述自适应遗传人工鱼群算法中自适应人工鱼群算法的改进具体包括:
15、1)自适应调节视距其表达式为:
16、
17、其中,lvmin和lvmax分别是人工鱼的最小可视范围和最大可视范围,ii和i分别是当前迭代次数和最大迭代次数;
18、2)自适应运动步长step*λ,其表达式为:
19、
20、其中,stepλmin和stepλmax分别是最小运动步长和最大运动步长;
21、3)自适应人工鱼浓度λ*,其表达式为:
22、
23、其中,λmin和λmax分别是人工鱼视野中的最小人工鱼浓度和最大人工鱼浓度。
24、优选地,在自适应人工鱼群算法进行全局路径规划的过程中,引入遗传算法,以metropolis准则作为更新准则,对人工鱼的状态进行更新;
25、设置适应度函数的阈值,按适应度对更新后的人工鱼进行排序,丢弃适应度大于或等于阈值的人工鱼;
26、对剩余的人工鱼进行遗传算法的杂交操作,产生新的人工鱼,对鱼群进行补充;
27、对状态最优的人工鱼进行遗传算法的突变操作,得到最优人工鱼状态,进行迭代计算,直至得到最优全局路径。
28、优选地,人工鱼的状态是否更新由概率函数p决定,概率函数p的表达式为:
29、其中,δxi是人工鱼j与鱼人工i的距离,rand(0,1)是在随机分布[0,1]中生成的随机数,t是控制参数,δxi的表达式为:δxi=xj-xi;
30、若p为1,则以metropolis准则对人工鱼的状态进行更新,并同步更新自适应人工鱼群算法的公告牌信息。
31、优选地,所述适应度函数的阈值κ的表达式为:
32、其中,fm是适应度函数的中位数,fbest是适应度函数的最优值。优选地,所述遗传算法中杂交操作产生新目标点的位置xnew的表达式为:
33、xnew=pcxi+(1-pc)xj,
34、
35、其中,pc、pcmin和pcmax分别为自适应交叉概率、最小交叉概率和最大交叉概率。
36、优选地,所述遗传算法中突变操作产生新的最优目标位置xbest的表达式为:
37、
38、
39、其中,pm、pmmin和pmmax分别是适应性突变概率、最小突变概率和最大突变概率。
40、优选地,所述动态窗口算法采用的自适应轨迹评估函数的表达式为:
41、
42、其中,dmin(v,ω)是从速度轨迹终点到全局最优路径的最短距离,v(v,ω)是当前点速度,dg(·)是从速度轨迹终点到局部目标点的最短距离,χ是自适应距离变量,k、b、c、d、e、f分别是对应的自定义系数;
43、轨迹评估函数d*(v,ω)的表达式为:
44、
45、其中,(xend,yend)是轨迹终点的坐标,(xg,yg)是局部目标点的坐标;
46、自适应距离变量χ的的表达式为:
47、
48、其中,δdt是机器人动态窗口中的轨迹移动距离,(xt,yt)是机器人在时间t处的坐标。
49、一种机器人,包括存储器和处理器,所述存储器用于存储计算机指令;处理器用于执行计算机指令以实现前述任一所述的方法。
50、与现有技术相比,本发明的有益效果是:
51、1、本发明通过改进的人工鱼群算法(afsa)对机器人的迈步进行全局路径规划,同时引入改进的遗传算法(ga)优化人工鱼个体的位置和速度,从而找到最优路径,提高机器人的路径规划精度;基于全局最优路径,采用改进的动态窗口法(dwa)优化局部路径,设计了新的自适应轨迹评估功能,提高了机器人避开局部障碍物的能力,可以使机器人的规划路径更加顺畅,显著减少小角度转折点和冗余点,缩短机器人规划路径长度;
52、2、本发明方法结合了人工鱼群算法(afsa)的全局搜索和动态窗口法(dwa)的局部优化能力,以提高机器人在地下矿道内的路径规划效果;在算法中,人工鱼群算法(afsa)被用于搜索全局最优路径,并通过优化人工鱼个体的位置和速度来找到最优路径;而动态窗口法(dwa)被用于在局部范围内优化路径,考虑机器人的动态窗口,并选择最优速度和转向角度,以避免与动态的障碍物发生碰撞,同时有效地保证了路径的平滑性。
- 还没有人留言评论。精彩留言会获得点赞!