移动机器人的沿边行驶方法及移动机器人与流程
本发明涉及一种移动机器人,尤其是涉及一种移动机器人的沿边行驶方法及移动机器人。
背景技术:
1、移动机器人指具有移动功能的智能机器人。例如清洁机器人,是一种以清洁功能为主的智能机器。通常使用无线控制技术,靠充电电池运作。内置定位机构,使其在运行过程中,能够躲避障碍物、得知所处位置以及规划清扫路线。随着生活水平的不断提高,清洁机器人得到了广泛的应用。
2、清洁机器人在slam(simultaneous localization and mapping,即时定位与地图构建)建图部署的流程中,通常会使用到的一种绘制禁区或者虚拟墙的方案为:采用清洁机器人的清洁路径生成禁区或者虚拟墙。以生成禁区为例,清洁机器人绕着禁行区行走一圈,并记录运行路径;然后,通过封闭运行路径,在地图上生成禁区;最后移动机器人在执行清扫任务时,会沿着生成的禁区边缘运动。
3、但是,在对现有技术的研究与实践的过程中,本技术的发明人发现,现有移动机器人的规划路线技术存在路线规划不合理导致漏扫区域较多的缺陷,进而导致移动机器人在执行清洁任务时存在实际清洁覆盖率低下和清洁效率低下的问题。
技术实现思路
1、有鉴于此,本发明提供了一种移动机器人的沿边行驶方法及移动机器人,用于解决现有技术中移动机器人漏扫区域较多导致实际清洁覆盖率低下和清洁效率低下的问题。
2、为达上述之一或部分或全部目的或其他目的,本发明提出一种移动机器人的沿边行驶方法及移动机器人。
3、第一方面:本技术提供了一种移动机器人的沿边行驶方法,包括:
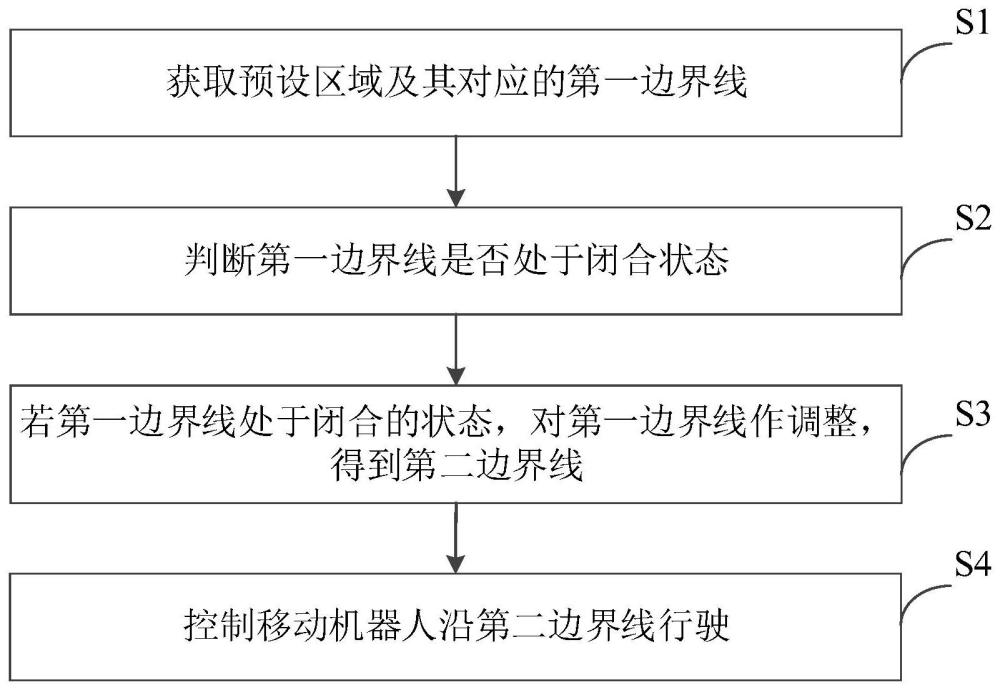
4、获取预设区域及其对应的第一边界线;
5、判断所述第一边界线是否处于闭合状态;
6、若所述第一边界线处于闭合的状态,对所述第一边界线作调整,得到第二边界线;
7、控制所述移动机器人沿所述第二边界线行驶。
8、进一步地,在本技术的一些实施例中,在所述对所述第一边界线作调整之前,所述方法还包括:
9、判断所述第一边界线上是否存在交点;
10、若所述第一边界线上存在所述交点,获取被所述交点分割后的多个第一子区域的大小;
11、判断多个所述第一子区域中是否存在大小小于或等于第一预设值的第一预设子区域;
12、若存在所述第一预设子区域,去除围设所述第一预设子区域的部分第一边界线。
13、进一步地,在本技术的一些实施例中,所述对所述第一边界线作调整,包括:
14、对所述第一边界线作内缩或/和外扩处理。
15、进一步地,在本技术的一些实施例中,将多个所述第一子区域中大小大于所述第一预设值的区域作为第二预设子区域,则所述对所述第一边界线作内缩或/和外扩处理,包括:
16、在所述第二预设子区域为多个时,获取多个所述第二预设子区域的相对位置关系;
17、若所述相对位置关系存在包含关系,对被包含的所述第二预设子区域执行外扩处理,对包含的第二预设子区域和剩余的所述第二预设子区域执行内缩处理;
18、若所述相对位置关系不存在包含关系,则对所有所述第二预设子区域执行内缩处理。
19、进一步地,在本技术的一些实施例中,将多个所述第一子区域中大小大于所述第一预设值的区域作为第二预设子区域,则所述对所述第一边界线作内缩或/和外扩处理,包括:
20、在所述第二预设子区域为多个时,获取多个所述第二预设子区域的相对位置关系;
21、若所述相对位置关系存在包含关系时,获取被包含的所述第二预设子区域与包含的所述第二预设子区域的交集;
22、去除所述包含的第二预设子区域的交集部分,并对剩余的区域进行内缩处理。
23、进一步地,在本技术的一些实施例中,所述内缩或外扩的距离为半个所述移动机器人的机身宽度。
24、进一步地,在本技术的一些实施例中,在对所述第一边界线作调整之前,所述方法还包括:
25、获取所述移动机器人与所述第一边界线的相对位置关系;
26、根据所述相对位置关系确定调整方向。
27、进一步地,在本技术的一些实施例中,所述根据所述相对位置关系确定调整方向,包括:
28、若所述第一边界线位于所述移动机器人的左侧,则将所述第一边界线向左调整;
29、若所述第一边界线位于所述移动机器人的右侧,将所述第一边界线向右调整。
30、进一步地,在本技术的一些实施例中,所述根据所述相对位置关系确定调整方向,包括:
31、若所述移动机器人的左右两侧均存在所述第一边界线,则获取其中一条所述第一边界线与所述移动机器人的第一距离,以及另一条所述第一边界线与所述移动机器人的第二距离;
32、基于所述第一距离和所述第二距离,确定距离所述移动机器人较近的一侧的所述第一边界线与移动机器人的相对位置关系,根据所述相对位置关系确定调整方向。
33、进一步地,在本技术的一些实施例中,在控制所述移动机器人沿所述第二边界线行驶之前,所述方法还包括:
34、检测所述第二边界线上是否存在角度小于第二预设值的尖角;
35、在所述第二边界线上存在小于第二预设值的尖角时,对所述尖角作平滑处理。
36、进一步地,在本技术的一些实施例中,在所述对所述尖角作平滑处理之后,所述方法还包括:
37、判断是否存在多个孤立的第三预设子区域;
38、若存在多个所述第三预设子区域,获取多个所述第三预设子区域之间的第一距离;
39、确定是否存在小于第三预设值的第一距离;
40、若存在小于第三预设值的第一距离,获取对应的所述第三预设子区域,连通所述所述第三预设子区域。
41、进一步地,在本技术的一些实施例中,所述方法还包括:
42、若所述第一边界线处于未闭合的状态,获取第一边界线的第一端点和第二端点;
43、对所述第一端点和所述第二端点作连接处理,使所述第一边界线闭合。
44、进一步地,在本技术的一些实施例中,所述对所述第一端点和所述第二端点作连接处理,包括:
45、获取第一端点和第二端点的第二距离;
46、若所述第二距离大于第四预设值,则基于所述第一边界线拟合的图形边界连接所述第一端点和第二端点;
47、若所述第二距离小于或等于第四预设值,则直线连接所述第一端点和所述第二端点。
48、进一步地,在本技术的一些实施例中,所述第一边界线的获取方式,包括:
49、控制所述移动机器人沿所述预设区域行驶一周;
50、获取所述移动机器人行驶一周的路径,得到所述预设区域的第一边界线。
51、第二方面:本技术提供了一种移动机器人,包括移动机器人本体、存储器、处理器,以及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如第一方面所述的移动机器人的沿边行驶方法的步骤。
52、实施本发明实施例,将具有如下有益效果:
53、首先获取移动机器人当前清洁任务的预设区域及其第一边界线,接着判断第一边界线是否处于闭合状态,若是,则对第一边界线进行调整,得到第二边界线,通过对闭合的边界线进行调整,避免现有移动机器人在路线规划时由于偏移实际区域导致漏扫区域较多的问题,从而控制移动机器人沿调整后得到的第二边界线行驶及执行清洁任务,有效提高移动机器人实际清洁覆盖率和清洁效率。
- 还没有人留言评论。精彩留言会获得点赞!