一种基于多UUV系统的牵制包容控制方法
本发明属于航行器控制,尤其涉及一种基于多uuv系统的牵制包容控制方法。
背景技术:
1、水下无人航行器(unmanned underwater vehicle,uuv)的编队控制能力是实现海洋勘探的核心能力之一。随着对uuv集群的研究深入,集中式的领航者-跟随者控制结构虽然能够牵强保持队形的一致性,但是其通信难度以及计算量巨大。牵制控制的特性就是用控制最少的节点,起到对整体控制的目的。在群体数量较多的情况下,其安全问题也需要考虑,包容控制可以解决此类问题,用少量uuv携带性能良好的传感器等组成安全域,对周围环境进行探测,当有危险时,会规划出一块安全的区域,剩余的uuv在控制率的作用下进入此块区域,顺利跨过危险区域。虽然说牵制控制可以解决大规模集群的一致性控制问题,但是受水下干扰的原因,如果编队中的单体都需要保持一致,会导致在队形形成初期难度陡增,耗时较长,这时候就需要包容控制策略来解决此类问题,不需要一次性形成一个高精度的队形,期间可以先生成一个大概的队形,也即形成一个松散式编队。这样就可以减少队形形成的时间,牵制包容控制是在实现uuv大型编队之中有着非常大的潜力。因此,亟需一种基于多uuv系统的牵制包容控制方法,以解决现有技术中的不足之处。
技术实现思路
1、本发明的目的在于提出一种基于多uuv系统的牵制包容控制方法,利用牵制包容控制协议有效降低系统的通信难度以及计算量,提高系统的控制性能和鲁棒性,满足欠驱动uuv三维轨迹跟踪对位置、速度以及姿态的时间约束要求。
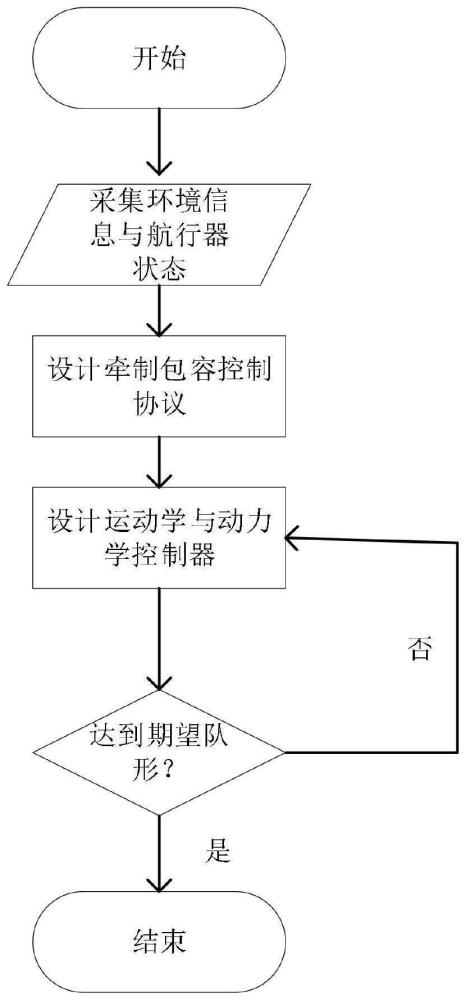
2、为实现上述目的,本发明提供了一种基于多uuv系统的牵制包容控制方法,具体包括以下步骤:
3、s1、获取水下无人航行器uuv集群,并构建每个uuv的运动学模型和动力学模型;
4、s2、采集所述uuv集群的领航器状态信息,并进行初始化;
5、s3、设置虚拟参考点,并根据所述uuv集群设计控制协议,所述控制协议包括牵制控制协议和包容控制协议;
6、s4、利用所述领航器状态信息以及所述运动学模型和所述动力学模型,设计路径跟踪控制器;
7、s5、根据所述控制协议和所述路径跟踪控制器完成单个uuv的路径跟踪,获取期望编队并保持队形航行到目标区域,实现基于多uuv系统的牵制包容控制。
8、可选的,所述水下无人航行器uuv集群包括一级领航者、二级领航者及跟随者。
9、可选的,所述运动学模型为:
10、
11、所述动力学模型为:
12、
13、其中,为北向坐标的微分,u为纵向速度,ψ为艏向角,θ为纵倾角,v为横向速度,为东向坐标的微分,为深度坐标的微分,为纵倾角的微分,q为纵倾角速度,为艏向角的微分,r为偏航角速度,为纵向速度的微分,m为uuv的重量,分别代表外力x、y、n对船体速度u、v、r的微分的微分,w为垂直甲板方向速度,τu为纵向推力,t为时间,t′=[t′1,0,0,t′2,t′3]t为刚体坐标系下纵向、纵倾、艏向上执行机构带来的输入未知有界时滞,ω=[ωu,ωv,ωw,ωq,ωr]t为环境未知有界干扰,为横向速度的微分,为垂直甲板方向速度的微分,为纵倾角速度的微分,iy为绕yb轴的转动惯量,代表外力m对船体速度u的微分的微分,b为uuv所浮力,为纵向稳心高,τq为纵倾角方向推力,为艏向角速度的微分,iz为绕zb轴的转动惯量,τr为艏向推力,xu、xu|u|、yv、yv|v|、zw、zw|w|、mq、mq|q|、nr、nr|r|为水动力阻尼系数。
14、可选的,领航器状态信息包括位置信息、姿态信息和速度信息。
15、可选的,所述牵制控制协议包括一级领航者控制协议、二级领航者控制协议和跟随着控制协议;
16、所述一级领航者控制协议为:
17、
18、这里且对设置如下协议:
19、
20、所述二级领航者控制协议为:
21、
22、所述跟随者控制协议为:
23、
24、其中,为期望位置的微分,为期望速度,xdi为横向期望位置,ydi为纵向期望位置,t为转置,为实数,为横向期望位置的变化量,为纵向期望位置的变化量,为矩阵部分元素之和,k为权值常量,j为第j个邻居航行器,aij为邻接矩阵中第i行第j列的元素,分别为自身估计的期望值以及邻居的期望值,dj、di分别为自身的相对距离以及邻居的相对距离,kc是常量,sgn(·)是符号函数,为邻居的相对距离的变化量,γ为牵制率,c为常数,代表当前节点航行器是否被一级领航者施加牵制效果,i为当前航行器,n为被牵制节点的集合,为非牵制节点的集合,为邻居的期望位置的变化量。
25、可选的,所述包容控制协议为:
26、
27、其中,lf1为是一级与二级领导者之间的拉普拉斯矩阵,df为度矩阵的入度,lf2为二级领导者之间的拉普拉斯矩阵,i2为单位矩阵,pl为领航者的位置,pf为跟随者的位置。
28、可选的,利用所述领航器状态信息以及所述运动学模型和所述动力学模型,设计所述路径跟踪控制器包括:
29、根据所述领航器状态信息,设计非奇异终端滑模面,并获取滑模面,所述滑模面为:
30、
31、通过所述滑模面,求得所述滑模面的导数为:
32、
33、将所述动力学模型和所述运动学模型分别导入所述滑模面的导数,获取所述路径跟踪控制器;
34、所述路径跟踪控制器为:
35、
36、所述路径跟踪控制器包括动力学路径跟踪控制器和运动学路径跟踪控制器;
37、其中,si1为滑模面,uei为速度跟踪误差,c1为正实数,p1、q1均为正奇数,且1<p1/q1<2,为滑模面的导数,为纵向速度的变化量,纵向速度期望的变化量,vi为速度,ri为艏向角速度,d11=-xu-xu|u||u|,xu代表外力x对船体速度u的微分,xu|u|为其泰勒展开后的高阶项,ui为纵向速度,τi1为纵向推力。
38、可选的,所述动力学路径跟踪控制器为:
39、
40、其中,k1为权值。
41、可选的,所述运动学路径跟踪控制器为:
42、
43、其中,τi3为艏向推力,d33=-nr-nr|r||r|,nr代表为外力n对船体速度r的微分,nr|r|为其泰勒展开后的高阶项,为期望艏向角加速度,q2为大于零的奇数,c2为大于零的常数,p2为大于零的奇数,为艏向角速度与期望值的误差,k2为权值,si2为滑模面。
44、可选的,根据所述控制协议和所述路径跟踪控制器完成单个uuv的路径跟踪,获取所述期望编队并保持队形航行到目标区域包括:
45、根据所述控制协议和所述路径跟踪控制器完成单个uuv的路径跟踪,获取编队结果;
46、判断所述编队结果是否满足期望的编队,当所述编队结果为所述期望编队时,继续保持所述编队结果直至航行到目标区域;
47、当所述编队结果没有形成所述期望编队时,返回s4继续执行,直至获取所述期望编队并航行到所述目标区域。
48、本发明具有以下有益效果:
49、本发明对于集群数量庞大的情况下,利用牵制包容控制协议有效降低其系统的通信难度以及计算量,提高系统的控制性能和鲁棒性,满足欠驱动uuv三维轨迹跟踪对位置、速度以及姿态的时间约束要求;多uuv能够保持期望队形以及平稳地跟踪上期望轨迹,控制性能良好。
- 还没有人留言评论。精彩留言会获得点赞!