一种园林机器人的移动控制方法、控制系统及计算机设备与流程
本技术涉及机器人,特别是涉及一种园林机器人的移动控制方法、控制系统及计算机设备。
背景技术:
1、园林机器人被广泛应用于家庭庭院植物的维护,园林机器人融合了运动控制、多传感器融合以及路径规划等技术。园林机器人可根据指令移动到目标地点,从而可在目标地点实行进一步操作。但目前的园林机器人,仅会根据移动路径移动,不会对移动路径上的植物的状态作出适当的作业操作,由此可能从较为高大茂盛的植物上碾压经过而对植物造成损坏,或者因为忽略了对植物的作业操作而需要重新行驶到移动路径上的某个区域重新对植物进行作业操作,降低了园林机器人的作业效率。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种园林机器人的移动控制方法、控制系统以及计算机设备,可根据移动路径上植物的状态控制园林机器人作出适当的作业操作,避免误碾压植物或者遗漏作业区域。
2、第一方面,本技术提供了一种园林机器人的移动控制方法,所述移动控制方法包括:
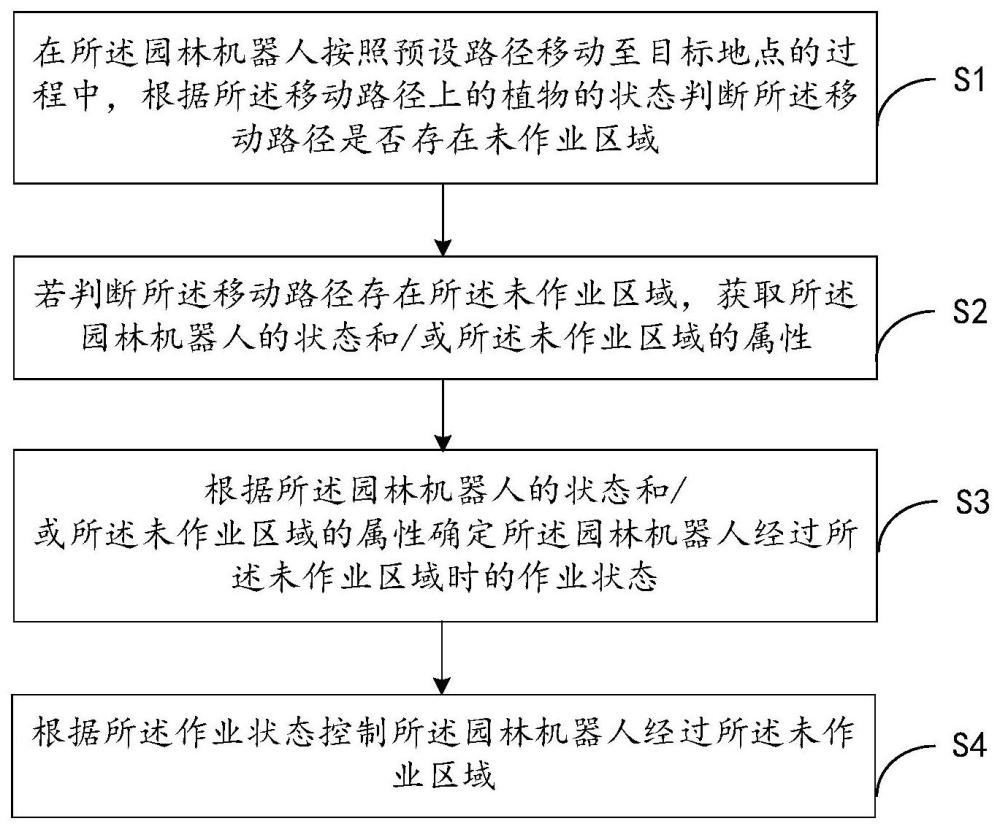
3、在所述园林机器人按照预设路径移动至目标地点的过程中,根据所述移动路径上的植物的状态判断所述移动路径是否存在未作业区域;
4、若判断所述移动路径存在所述未作业区域,获取所述园林机器人的状态和/或所述未作业区域的属性;
5、根据所述园林机器人的状态和/或所述未作业区域的属性确定所述园林机器人经过所述未作业区域时的作业状态;
6、根据所述作业状态控制所述园林机器人经过所述未作业区域。
7、在其中一个实施例中,所述根据所述移动路径上的植物的状态判断所述移动路径是否存在未作业区域的步骤,还包括:
8、获取所述移动路径上的所述植物的叶绿素含量;
9、根据所述叶绿素含量判断所述移动路径上是否存在未作业区域。
10、在其中一个实施例中,所述获取所述移动路径上的所述植物的叶绿素含量的方法,包括:
11、在所述园林机器人移动过程中,通过多光谱传感器获取植物在不同波长下的多光谱信息,根据所述多光谱信息确定所述移动路径上的所述植物的叶绿素含量。
12、在其中一个实施例中,所述多光谱传感器倾斜向下设置于所述园林机器人的侧前方。
13、在其中一个实施例中,在所述园林机器人按照预设路径移动到目标地点之前,所述方法包括:
14、获取目标地点的第一位置以及所述园林机器人当前的第二位置;
15、基于所述第二位置判断所述园林机器人是否完成周期性作业;
16、若判断到所述园林机器人完成周期性作业,则规划一条从所述第二位置移动到所述第一位置的预设路径;
17、若判断到所述园林机器人未完成周期性作业,则基于所述第二位置确定所述园林机器人当前周期的作业路径中的初始位置和结束位置,基于所述第一位置、所述第二位置、所述初始位置或所述结束位置规划预设路径。
18、在其中一个实施例中,所述基于所述第一位置、所述第二位置、所述初始位置或所述结束位置规划所述预设路径的步骤,还包括:
19、确定所述第二位置到所述结束位置的第一距离,以及确定所述第二位置到所述初始位置的第二距离,比较所述第一距离和所述第二距离的大小;
20、若所述第一距离小于所述第二距离,则规划的所述移动路径为:始于所述第二位置,经过所述结束位置,并且终于所述第一位置;
21、若所述第一距离大于所述第二距离,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置,并且终于所述第一位置;
22、若所述第一距离等于所述第二距离,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置或所述结束位置,并且终于所述第一位置。
23、在其中一个实施例中,所述基于所述第一位置、所述第二位置、所述初始位置或所述结束位置规划所述预设路径的步骤,还包括:
24、确定所述第二位置和所述结束位置的第三距离,并将所述第三距离与第一距离阈值比较;
25、若所述第三距离大于所述第一距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置,并且终于所述第一位置;
26、若所述第三距离小于所述第一距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述结束位置,并且终于所述第一位置;
27、若所述第三距离等于所述第一距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置或所述结束位置,并且终于所述第一位置。
28、在其中一个实施例中,所述基于所述第一位置、所述第二位置、所述初始位置或所述结束位置规划所述预设路径的步骤,还包括:
29、确定所述第二位置和所述初始位置的第四距离,并将所述第四距离与第二距离阈值比较;
30、若所述第四距离大于所述第二距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述结束位置,并且终于所述第一位置;
31、若所述第四距离小于所述第二距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置,并且终于所述第一位置;
32、若所述第四距离等于所述第二距离阈值,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置或所述结束位置,并且终于所述第一位置。
33、在其中一个实施例中,所述基于所述第一位置、所述第二位置、所述初始位置或所述结束位置规划所述预设路径的步骤,还包括:
34、确定依次经过所述第二位置、所述结束位置以及所述第一位置的路径的第五距离;
35、确定依次经过所述第二位置、所述初始位置以及所述第一位置的路径的第六距离;
36、并比较所述第五距离和所述第六距离的大小;
37、若所述第五距离小于所述第六距离,则规划的所述移动路径为:始于所述第二位置,经过所述结束位置,并且终于所述第一位置;
38、若所述第五距离大于所述第六距离,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置,并且终于所述第一位置;
39、若所述第五距离等于所述第六距离,则规划的所述移动路径为:始于所述第二位置,经过所述初始位置或所述结束位置,并且终于所述第一位置。
40、在其中一个实施例中,所述根据所述园林机器人的状态和/或所述未作业区域的属性确定所述园林机器人经过所述未作业区域时的作业状态的步骤,还包括:
41、若所述园林机器人的状态为作业故障状态、电量低于预设电量阈值或者所述未作业区域的属性超出预设阈值,则确定所述园林机器人需对所述未作业区域进行沿边以绕过所述未作业区域;
42、若所述园林机器人的状态为正常作业状态、电量大于所述阈值电量阈值且满足以下条件的至少一个:所述未作业区域的属性符合所述预设阈值以及所述园林机器人在所述目标地点的预设范围内,则确定所述园林机器人需对所述未作业区域的植物进行作业操作;
43、其中,所述属性包括所述未作业区域的面积、尺寸以及周长。
44、在其中一个实施例中,确定所述园林机器人经过所述未作业区域时的作业状态的步骤之前还包括:
45、所述对未作业区域进行沿边,获取所述未作业区域的属性,其中:
46、在沿边过程中,获取所述园林机器人前进方向上表征植物状态的图像;
47、根据植物状态的图像确定已作业区域和未作业区域的分界线;
48、判断所述分界线是否在预设位置;
49、若所述分界线不在所述预设位置,控制所述园林机器人调整位姿,以使所述分界线在预设位置。
50、在其中一个实施例中,所述对未作业区域进行沿边的步骤,还包括:
51、在对未作业区域进行沿边的过程中,判断沿边路径的长度是否超过预设值;
52、若所述沿边路径的长度超过预设值,控制所述园林机器人对未作业区域进行反向沿边。
53、第二方面,本技术还提供了一种园林机器人的移动控制系统,所述移动控制系统包括:
54、判断模块,用于在所述园林机器人按照预设路径移动至目标地点的过程中,根据所述移动路径上的植物的状态判断所述移动路径是否存在未作业区域;
55、获取模块,用于在所述判断模块判断所述移动路径存在所述未作业区域时,获取所述园林机器人的状态和/或所述未作业区域的属性;
56、确定模块,用于根据所述园林机器人的状态和/或所述未作业区域的属性确定所述园林机器人经过所述未作业区域时的作业状态;
57、控制模块,用于根据所述作业状态控制所述园林机器人经过所述未作业区域。
58、第三方面,本技术还提供了一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器中存储有计算机可读指令,所述处理器用于执行所述计算机可读指令时实现前文所述的方法的步骤。
59、上述介绍了一种园林机器人的移动控制方法、控制系统以及计算机设备。移动控制方法包括:在所述园林机器人按照预设路径移动至目标地点的过程中,根据所述移动路径上的植物的状态判断所述移动路径是否存在未作业区域;若判断所述移动路径存在所述未作业区域,获取所述园林机器人的状态和/或所述未作业区域的属性;根据所述园林机器人的状态和/或所述未作业区域的属性确定所述园林机器人经过所述未作业区域时的作业状态;根据所述作业状态控制所述园林机器人经过所述未作业区域。由此可根据园林机器人的状态和/或未作业区域的属性移动路径上植物的状态控制园林机器人作出适当的作业操作,避免园林机器人碾压移动路径上高大茂盛的植物或者遗漏作业区域,从而避免对植物造成损坏,同时也提高了园林机器人的作业效率。
- 还没有人留言评论。精彩留言会获得点赞!