电磁阀岛控制信号校验方法及系统与流程
本发明涉及电气一体化,更具体地说,本发明涉及电磁阀岛控制信号校验方法及系统。
背景技术:
1、数据采集是所有工业自动化系统中必不可少的环节,工业自动化依赖于数据采集与监视系统(scada),而负责数据传感器和执行器数据的采集的远程i/o系统是scada架构中的重要组成部分,支持数据处理及网络通信功能,电磁阀作为气动系统控制元件广泛应用在制造业,随着自动化程度的提升,设备中使用电磁阀数量越来越多,总线型阀岛就是把电磁阀输出模块、总线通信模块、输入/输出(i/o)卡件集成布置在一个机架内,总线型阀岛具有网络故障检测、子网故障检测以及自我故障诊断等功能,传统的总线型阀岛检测是否有实际压力输出进行诊断,现有技术中,已经出现了通过控制信号中的电磁阀动作次数进行诊断;
2、例如,申请公开号为cn115899366a的专利公开了压力控制电磁阀的故障预警方法、装置、设备和存储介质,上述专利通过采集电磁阀的动作次数,通过判断动作次数是否超过历史数据库中历史动作次数的阈值上限,从而进行后续的预警工作,虽然上述专利通过采集电磁阀的动作次数进行预警,但还存在以下缺陷:
3、上述专利虽然通过控制信号中的电磁阀的动作次数进行诊断,但是电磁阀存在多种故障类型,最为常见的是电磁阀短路、电磁阀断路、电磁阀供电欠压和电磁阀供电过压,电磁阀断路和电磁阀供电欠压会导致电磁阀的动作次数减小,反之电磁阀短路和电磁阀供电过压会导致电磁阀的动作次数增大,上述专利仅通过电磁阀的动作次数无法对相应的电磁阀故障类型进行校验,导致无法进行准确的诊断工作。
4、鉴于此,本发明提出电磁阀岛控制信号校验方法及系统以解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供电磁阀岛控制信号校验方法及系统。
2、为实现上述目的,本发明提供如下技术方案:
3、电磁阀岛控制信号校验方法,包括:
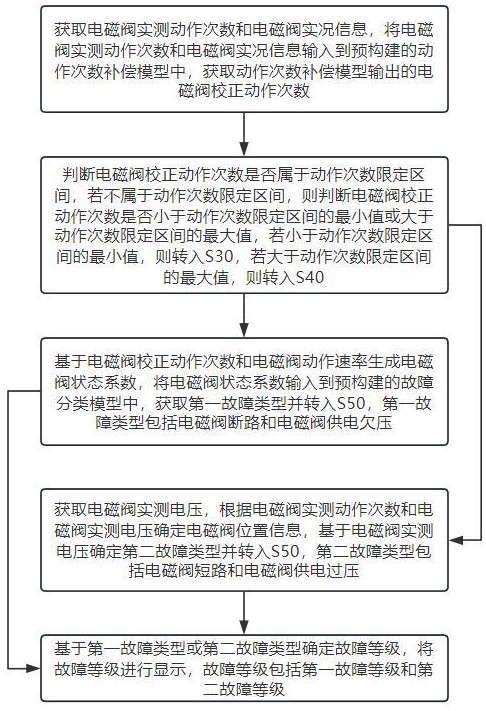
4、s10:获取电磁阀实测动作次数和电磁阀实况信息,将电磁阀实测动作次数和电磁阀实况信息输入到预构建的动作次数补偿模型中,获取动作次数补偿模型输出的电磁阀校正动作次数,电磁阀实况信息包括电磁阀漏气率和电磁阀动作速率;
5、s20:判断电磁阀校正动作次数是否属于动作次数限定区间,若不属于动作次数限定区间,则判断电磁阀校正动作次数是否小于动作次数限定区间的最小值或大于动作次数限定区间的最大值,若小于动作次数限定区间的最小值,则转入s30,若大于动作次数限定区间的最大值,则转入s40;
6、s30:基于电磁阀校正动作次数和电磁阀动作速率生成电磁阀状态系数,将电磁阀状态系数输入到预构建的故障分类模型中,获取第一故障类型并转入s50,第一故障类型包括电磁阀断路和电磁阀供电欠压;
7、s40:获取电磁阀实测电压,根据电磁阀实测动作次数和电磁阀实测电压确定电磁阀位置信息,基于电磁阀实测电压确定第二故障类型并转入s50,第二故障类型包括电磁阀短路和电磁阀供电过压;
8、s50:基于第一故障类型或第二故障类型确定故障等级,将故障等级进行显示,故障等级包括第一故障等级和第二故障等级。
9、进一步地,获得测试数据集的方法包括:
10、在动态测试环境下,将电磁阀漏气率设置为基准值,电磁阀动作速率进行动态变化,以获得第一实验数据,重复n次获得第一实验数据组,n为大于1的正整数;
11、将电磁阀动作速率设置为基准值,电磁阀漏气率进行动态变化,以获得第二实验数据,重复n次获得第二实验数据组,第一实验数据和第二实验数据均包括电磁阀漏气率、电磁阀动作速率和动作次数差值,所述动作次数差值为电磁阀测试动作次数减去电磁阀标准动作次数;
12、调整电磁阀漏气率和电磁阀动作速率的基准值,获得第一实验数据集和第二实验数据集,将第一实验数据集和第二实验数据集融合,生成测试数据集,所述第一实验数据集由j个第一实验数据组构成,所述第二实验数据集由j个第二实验数据组构成,j为大于1的正整数。
13、进一步地,所述动作次数补偿模型为数学模型,基于测试数据集训练动作次数补偿模型方法包括:
14、mas=;
15、式中,mas为电磁阀校正动作次数,为电磁阀实测动作次数,为动作次数差值,和均为权重因子。
16、进一步地,基于电磁阀校正动作次数和电磁阀动作速率生成电磁阀状态系数的方法包括:
17、;
18、式中,为电磁阀状态系数,为电磁阀动作速率,为电磁阀校正动作次数,为自然常数,和均为权重因子。
19、进一步地,故障分类模型的训练过程为:获取i组数据,i为大于等于1的正整数,数据包括电磁阀状态系数和第一故障类型,将电磁阀状态系数和第一故障类型作为样本集,将样本集划分为训练集和测试集,构建分类器,将训练集中的电磁阀状态系数作为输入数据,将训练集中的第一故障类型作为输出数据,对分类器进行训练,得到初始分类器,利用测试集对初始分类器进行测试,输出满足预设准确度的分类器作为故障分类模型。
20、进一步地,根据电磁阀实测动作次数和电磁阀实测电压确定电磁阀位置信息的方法包括:
21、获取电磁阀实测动作次数相对应的第一设备信息,以及电磁阀实测电压相对应第二设备信息,所述第一设备信息为计数器序列号,所述第二设备信息为示波器序列号;
22、基于第一设备信息、第二设备信息和预构建的知识图谱,获取实体信息,所述实体信息为电磁阀序列号;
23、根据预构建的知识图谱和实体信息,获取电磁阀位置信息。
24、进一步地,所述知识图谱构建的方法包括:
25、获取m组图谱数据,m为大于1的正整数,图谱数据包括电磁阀序列号、第一设备信息、第二设备信息和电磁阀位置信息;
26、将电磁阀序列号作为实体,通过信息抽取技术确定电磁阀序列号与第一设备信息、第二设备信息和电磁阀位置信息的实体关系,信息抽取技术包括关系抽取、事件抽取、模板填充、语义角色标注和共指消解;
27、基于图谱数据和实体关系构建知识图谱。
28、进一步地,基于电磁阀实测电压确定第二故障类型的方法包括:
29、当电磁阀实测电压小于预设电压阈值时,所述第二故障类型为电磁阀短路;
30、当电磁阀实测电压大于或等于预设电压阈值时,所述第二故障类型为电磁阀供电过压。
31、进一步地,基于第一故障类型或第二故障类型确定故障等级的方法包括:
32、当第一故障类型为电磁阀断路时,则将第一故障类型标记为第一故障等级;
33、当第一故障类型为电磁阀供电欠压时,则将第一故障类型标记为第二故障等级;
34、当第二故障类型为电磁阀短路时,则将第一故障类型标记为第一故障等级;
35、当第二故障类型为电磁阀供电过压时,则将第二故障类型标记为第二故障等级。
36、电磁阀岛控制信号校验系统,其用于实现上述电磁阀岛控制信号校验方法,包括:
37、数据补偿模块:获取电磁阀实测动作次数和电磁阀实况信息,将电磁阀实测动作次数和电磁阀实况信息输入到预构建的动作次数补偿模型中,获取动作次数补偿模型输出的电磁阀校正动作次数,电磁阀实况信息包括电磁阀漏气率和电磁阀动作速率;
38、判定模块:判断电磁阀校正动作次数是否属于动作次数限定区间,若不属于动作次数限定区间,则判断电磁阀校正动作次数是否小于动作次数限定区间的最小值或大于动作次数限定区间的最大值,若小于动作次数限定区间的最小值,则转入第一类型确定模块,若大于动作次数限定区间的最大值,则转入第二类型确定模块;
39、第一类型确定模块:基于电磁阀校正动作次数和电磁阀动作速率生成电磁阀状态系数,将电磁阀状态系数输入到预构建的故障分类模型中,获取第一故障类型并转入等级确定模块,第一故障类型包括电磁阀断路和电磁阀供电欠压;
40、第二类型确定模块:获取电磁阀实测电压,根据电磁阀实测动作次数和电磁阀实测电压确定电磁阀位置信息,基于电磁阀实测电压确定第二故障类型并转入等级确定模块,第二故障类型包括电磁阀短路和电磁阀供电过压;
41、等级确定模块:基于第一故障类型或第二故障类型确定故障等级,将故障等级进行显示,故障等级包括第一故障等级和第二故障等级。
42、一种电子设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述电磁阀岛控制信号校验方法。
43、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述电磁阀岛控制信号校验方法。
44、相比于现有技术,本发明的有益效果为:
45、(1)本发明中电磁阀实测动作次数和电磁阀实况信息可以对相应的电磁阀故障类型进行校验,使得阀岛能够进行准确的自我故障诊断功能,使得阀岛的故障能够得到快速的解决,避免阀岛因故障而出现较大程度的损坏;
46、(2)本发明中无论是电磁阀断路或者电磁阀短路,都会导致阀岛上的电磁阀过热或电流异常,从而对电磁阀本身造成损坏,影响阀岛的正常运行,需要工作人员紧急进行修理,因此若阀岛中存在电磁阀断路、电磁阀供电欠压等情况,工作人员可以根据故障等级进行依次处理,保证工作效率的最大化。
- 还没有人留言评论。精彩留言会获得点赞!