一种工业机器人外部运动轨迹规划方法及系统
本发明涉及机器人,具体是一种工业机器人外部运动轨迹规划方法及系统。
背景技术:
1、目前,机器人已经广泛应用于自动化领域,如医疗、服务、焊接、搬运等。随着机器人技术的发展,机器人趋向智能化,高效化和人性化,大大提高了生产效率,推进了工业化的进程。
2、传统的工业机器人控制器只能示教一下简单的轨迹,如点到点,直线和圆弧运动,这些示教轨迹可以满足大部分的工业现场应用。但随着机器人应用领域的拓展,需要更复杂的轨迹来完成特定的作业任务,例如:人跳舞轨迹、动物捕捉轨迹、路面颠簸轨迹等,这些轨迹主要用于模拟复杂的动作。传统的机器人控制器无法生成这些复杂的轨迹,因此,本发明涉及一种工业机器人外部运动轨迹规划方法及系统,可以快速高效地生成外部轨迹。
3、对现有相关技术进行文献检索后发现,中国专利号:cn107351088b,名称:一种机器人外部运动路径控制方法。控制器接收外部输入的运动路径,经信号处理模块和运动学模块处理成驱动器可接收的数据,从而实现机器人沿着用户自定义的复杂路径运动。该专利的方法没有离散点筛查与剔除和速度调节功能,实际可行性较低。
4、因此,现有技术中缺乏一种工业机器人外部运动轨迹的接口,能够快速高效地生成外部轨迹。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种工业机器人外部运动轨迹规划方法及系统,解决了传统工业机器人控制器无法生成复杂轨迹的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种工业机器人外部运动轨迹规划方法,包括以下步骤:
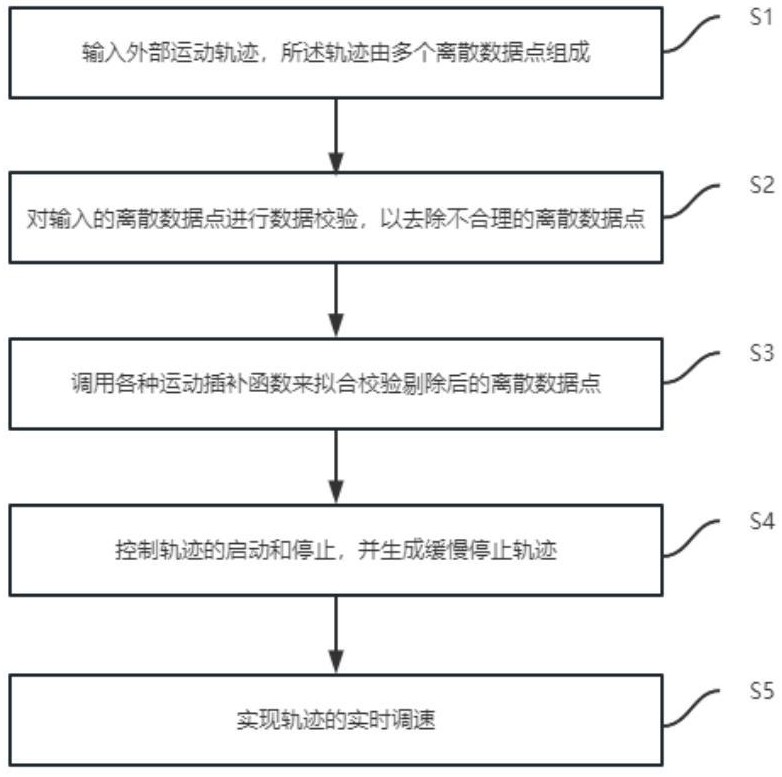
4、s1、输入外部运动轨迹,所述运动轨迹包括机器人关节空间轨迹和末端笛卡尔空间轨迹,所述轨迹由多个离散数据点组成;
5、s2、对输入的离散数据点进行数据校验,以去除不合理的离散数据点;
6、s3、调用各种运动插补函数来拟合校验剔除后的离散数据点;
7、s4、控制轨迹的启动和停止,并生成缓慢停止轨迹;
8、s5、实现轨迹的实时调速。
9、作为本发明进一步的技术方案,在步骤s1中,所述离散数据点表示为:
10、;
11、其中,n是离散点数目,是第i个离散点,pn是离散点序列;
12、若所述运动轨迹为机器人关节空间轨迹,则 p i表示为关节角;
13、若所述运动轨迹为末端笛卡尔空间轨迹,则 p i表示为空间位置和姿态。
14、作为本发明进一步的技术方案,所述对输入的离散数据点进行数据校验,以去除不合理的离散数据点的步骤包括:
15、机器人关节限位约束条件为:;
16、其中, qmin是机器人最小关节角, qmax是机器人最大关节角;
17、通过数值微分求得离散点 p i的速度为:;
18、其中,δt是采样时间, v i是离散点 p i的速度, p i-1是第 i-1个离散点;
19、机器人关节速度约束条件为:;
20、其中,是机器人最小关节速度,是机器人最大关节速度;
21、当离散点 p k(1≤ k≤ n)不满足关节限位和关节速度约束中的至少一种时,则去除该离散点,剩下的离散点组成的序列为:
22、。
23、作为本发明进一步的技术方案,所述调用各种运动插补函数来拟合校验剔除后的离散数据点的步骤包括:
24、用户在界面上选择拟合曲线类型,所述曲线类型包括多项式曲线、b样条曲线、bézier曲线和时间最优拟合曲线,拟合后的曲线表示为:
25、;
26、其中,f(.)是拟合曲线函数,t是时间变量,q(t)是生成的轨迹。
27、作为本发明进一步的技术方案,在步骤s4中,使用时间缩放方法的停止规划表示为:
28、;
29、其中, t i为当前时刻, t i-1为前一时刻, t c为插补周期时间,m是时间缩放系数,在停止运动过程时,规划m值,使得m经过一段时间后从1降至0,从而实现停止;
30、采用五次多项式对m进行规划,表示为:
31、;
32、其中, t stop是停止运动所需的时间。
33、作为本发明进一步的技术方案,在步骤s5中,采用时间缩放方法实现轨迹的实时调速的公式为:
34、;
35、;
36、其中,是新的时间变量, σ(.)是时间缩放函数,是时间缩放后的轨迹。
37、本发明还提供了一种工业机器人外部运动轨迹规划系统,所述系统包括:
38、用户界面模块,用于输入外部运动轨迹,所述运动轨迹包括是机器人关节空间轨迹和末端笛卡尔空间轨迹,所述轨迹由多个离散数据点组成;
39、数据校验模块,用于对输入的离散数据点进行数据校验和不合理点的去除;
40、运动插补模块,用于调用各种运动插补函数来拟合校验剔除后的离散数据点;
41、启停模块,用于控制轨迹的启动和停止,并生成缓慢停止轨迹;
42、速度调节模块,用于实现轨迹的实时调速。
43、与现有技术相比,本发明的有益效果是:本发明提供了一种工业机器人外部运动轨迹规划方法及系统,传统的工业机器人控制器只能示教一些简单的轨迹,而无法生成复杂的轨迹,而本发明可以快速高效地生成外部轨迹。与传统的方法相比,用户界面用于输入外部运动轨迹,轨迹由多个离散点组成;数据校验模块对输入的轨迹数据点进行数据校验和剔除,以满足机器人限位和最大关节速度等约束条件;运动插补模块会自动调用运动插补库函数来拟合离散点轨迹;启停模块用于控制轨迹的启动和停止,并生成缓慢停止轨迹;速度调节模块用于实现轨迹的实时调速以实现。本发明实现了工业机器人外部轨迹控制,且运动路径具有轨迹平滑和速度可调等优点,实际可行性高,解决了传统方法中没有离散点筛查与剔除和速度调节功能,实际可行性较低等问题。
- 还没有人留言评论。精彩留言会获得点赞!