一种巡检机器人路线规划方法及系统与流程
本发明涉及路线规划,尤其涉及一种巡检机器人路线规划方法及系统。
背景技术:
1、在化工生产中,一般会将操作工分为主控和现场,现场人员负责执行来自主控系统的控制指令,通过控制设备来调整生产过程中的各个参数;此外,现场人员还负责生产区域内设备的巡检工作,及时发现跑冒滴漏,保障生产设备的正常运行,但是生产现场的情况较为复杂,可能会存在有毒有害气体,如石油炼制和纸浆制造等过程中可能产生的硫化氢,亦或是金属炼制过程中产生的氰化物,都会损伤人体机能,虽然在正常情况,这些有毒有害气体并不会泄露,但是可能会存在微量跑冒,并在某处堆积,影响现场人员安全。
2、越来越多的企业通过巡检机器人在危险区域进行巡检,但是巡检现场存在多个巡检点位,并且每个巡检点位的巡检频率也不同,导致巡检机器人容易发生漏检,并且也无法直观地将巡检结果公示在现场,而企业一般会根据工艺流程将现场分为多个相对独立的工段,其他工段不熟悉工况的现场人员或是外来施工人员等来到本工段内未巡检的区域,可能会造成意外损坏,影响人员安全;因此,如何避免巡检机器人漏检,并直观地展示出每个巡检点位的巡检状态,是本发明所需要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种巡检机器人路线规划方法及系统,以解决上述背景技术中提出“如何避免巡检机器人漏检,并直观地展示出每个巡检点位的巡检状态”的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种巡检机器人路线规划方法,所述方法包括:
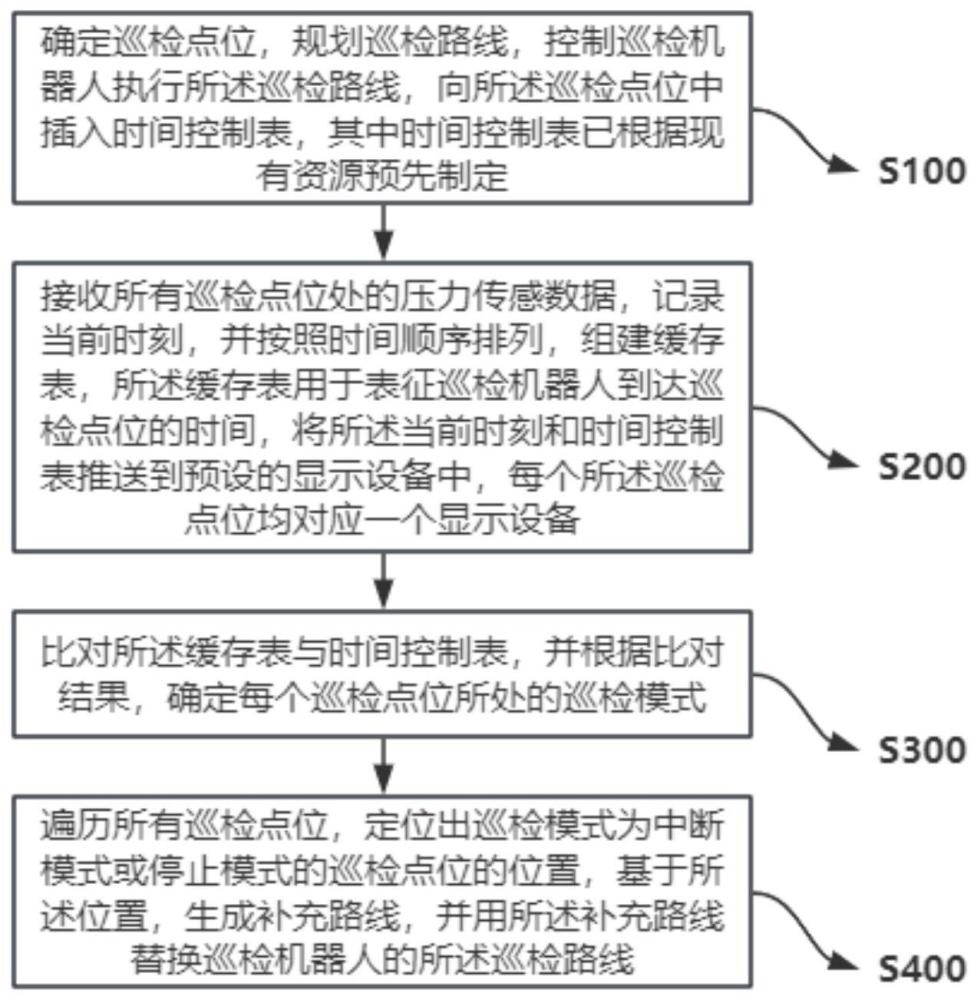
4、确定巡检点位,规划巡检路线,控制巡检机器人执行所述巡检路线,向所述巡检点位中插入时间控制表,其中时间控制表已根据现有资源预先制定;
5、接收所有巡检点位处的压力传感数据,记录当前时刻,并按照时间顺序排列,组建缓存表,所述缓存表用于表征巡检机器人到达巡检点位的时间;
6、将所述当前时刻和时间控制表推送到预设的显示设备中,每个所述巡检点位均对应一个显示设备;
7、比对所述缓存表与时间控制表,并根据比对结果,确定每个巡检点位所处的巡检模式;
8、遍历所有巡检点位,定位出巡检模式为中断模式或停止模式的巡检点位的位置,基于所述位置,生成补充路线,并用所述补充路线替换巡检机器人的所述巡检路线。
9、进一步的,所述确定巡检点位,规划巡检路线的步骤包括:
10、划定巡检点位的途经点;
11、根据创建好的巡检任务列表,确定每个巡检点位的巡检任务;
12、整合所述途经点和巡检任务,生成巡检路线。
13、进一步的,所述接收所有巡检点位处的压力传感数据,记录当前时刻,并按照时间顺序排列,组建缓存表的步骤包括:
14、实时获取途经点的压力传感数据,进行二元分类,并将分类结果确定为0和1;
15、其中当接收到分类结果为1的压力传感数据后,记录当前时刻,并构建缓存表;
16、对所述时间控制表进行分解,获取预期时间,并插入到对应的巡检点位中。
17、进一步的,所述方法还包括:
18、根据所述缓存表,计算出巡检机器人到达所述巡检点位的平均时间;
19、以平均时间与当前时刻的差值为横坐标,巡检机器人离途经点的距离为纵坐标,构建到达曲线;
20、遍历出所述到达曲线中的偏移点,并利用所述偏移点修正所述巡检路线。
21、进一步的,所述比对所述缓存表与时间控制表,并根据比对结果,确定每个巡检点位所处的巡检模式的步骤还包括:
22、划分巡检模式,所述巡检模式至少包括中断模式、停止模式和正常模式;
23、生成巡检模式的定义原则,并确定每个巡检点位的巡检模式,建立巡检模式对应的反馈机制;
24、生成巡检模式与反馈机制的触发关系。
25、进一步的,所述遍历所有巡检点位,定位出巡检模式为中断模式或停止模式的巡检点位的位置,基于所述位置,生成补充路线,并用所述补充路线替换巡检机器人的所述巡检路线的步骤包括:
26、向所述巡检点位中插入重要性标签;
27、判断巡检模式为中断模式或停止模式的巡检点位的重要性标签是否大于预设的阈值;
28、如果是,则向巡检机器人发送到达命令;
29、如果否,则将所述位置整合到巡检路线中,生成补充路线。
30、进一步的,所述方法还包括:
31、将巡检机器人采集到的数据发送到巡检点位的边缘网关中,并对数据进行处理;
32、构建边缘网关的数据传输链路,所述数据传输链路至少包括两条,其中一条指向预设的显示设备,另一条指向目标终端;
33、利用所述数据传输链路发送数据的处理结果。
34、进一步的,所述系统包括:
35、规划模块,用于确定巡检点位,规划巡检路线,控制巡检机器人执行所述巡检路线,向所述巡检点位中插入时间控制表,其中时间控制表已根据现有资源预先制定;
36、记录模块,能够接收所有巡检点位处的压力传感数据,记录当前时刻,并按照时间顺序排列,组建缓存表,所述缓存表用于表征巡检机器人到达巡检点位的时间,将所述当前时刻和时间控制表推送到预设的显示设备中,每个所述巡检点位均对应一个显示设备;
37、确定模块,可以比对所述缓存表与时间控制表,并根据比对结果,确定每个巡检点位所处的巡检模式;
38、遍历模块,用于遍历所有巡检点位,定位出巡检模式为中断模式或停止模式的巡检点位的位置,基于所述位置,生成补充路线,并用所述补充路线替换巡检机器人的所述巡检路线。
39、进一步的,所述规划模块包括:
40、划定单元,用于划定巡检点位的途经点;
41、确定单元,能够根据创建好的巡检任务列表,确定每个巡检点位的巡检任务;
42、整合单元,用于整合所述途经点和巡检任务,生成巡检路线。
43、进一步的,所述记录模块包括:
44、分类单元,可以实时获取途经点的压力传感数据,进行二元分类,并将分类结果确定为0和1;
45、记录单元,用于在接收到分类结果为1的压力传感数据后,记录当前时刻,并基于所述当前时刻,构建缓存表;
46、插入单元,可以对所述时间控制表进行分解,获取预期时间,并插入到对应的巡检点位中。
47、与现有技术相比,本发明的有益效果是:
48、1、通过记录当前时刻,可对巡检机器人的巡检时间进行记录,并且通过向巡检点位中插入时间控制表,可以保证巡检点位能够得到按时巡检,通过划分巡检模式和利用预设的显示设备,可以直观地展示出各巡检点位的巡检状态,防止其他现场人员和外来施工人员误入未巡检区域,并且通过生成补充路线,可以消除巡检死角,避免了漏检现象的发生,极大地提高了巡检机器人的巡检效率。
49、2、通过在边缘网关中对巡检数据进行处理,大大地降低了通信延迟,提高了巡检数据的处理效率,同时也减少了对敏感信息地传输,提高了隐私保护水平。
- 还没有人留言评论。精彩留言会获得点赞!