走航监测车及其控制方法、控制装置与流程
本发明涉及环境监测,特别涉及一种走航监测车的控制方法、走航监测车的控制装置以及走航监测车。
背景技术:
1、飞行时间质谱仪是一种高端精密实验室仪器,已广泛应用于生命科学、药品、食品检测领域。近年来,随着人民与社会对环境保护的需求愈加强烈,各类环境监测仪器也应运而生。在此背景下,飞行时间质谱仪被正式引入环境监测领域,因其具备快速定性定量检测的优势,被广泛应用于空气中各种常见污染物(vocs、气溶胶、恶臭气体等)的快速走航监测,以确定污染物类型及空间分布特征,为污染溯源提供数据支撑。
2、然而,现有的飞行时间质谱走航车通常采用人为驾驶的普通监测车,飞行时间质谱仪也完全依靠技术人员现场手动操作,自动化、智能化程度极低,完成一次走航服务至少需要配备一名驾驶员和一名技术员,人力成本较高,且难以应对毒害污染较严重的恶劣环境现场,如爆炸事故现场、污染泄露场所等。
技术实现思路
1、本发明的一个目的在于提出一种走航监测车的控制方法,能够实现无人走航,以及在进行无人走航时车内质谱仪的智能监控保护。
2、本发明的另一目的在于提出一种走航监测车的控制装置。
3、本发明的再一目的在于提出一种走航监测车。
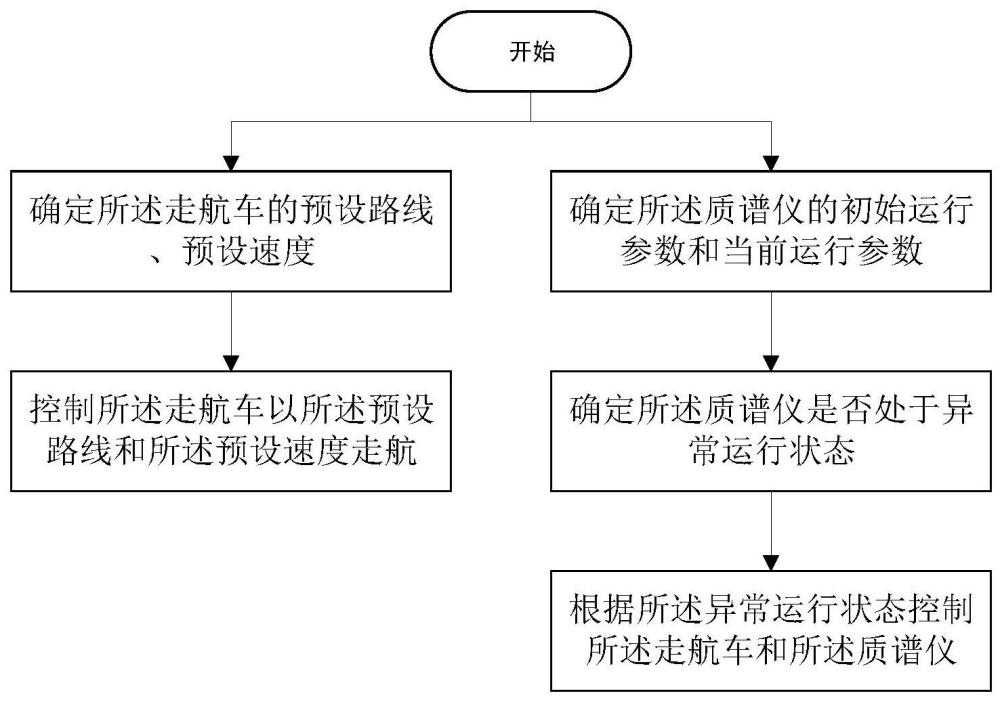
4、根据本发明实施例的走航监测车的控制方法,所述走航监测车包括走航车和质谱仪,所述控制方法包括:确定所述走航车的预设路线、预设速度;控制所述走航车以所述预设路线和所述预设速度走航;确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,所述异常运行状态是根据所述当前运行参数和所述初始运行参数的比较结果确定的。
5、根据本发明实施例的走航监测车的控制方法,能够实现无人走航,以及在进行无人走航时车内质谱仪的智能监控保护。
6、另外,根据本发明上述实施例的走航监测车的控制方法,还可以具有如下附加的技术特征:
7、一些实施例中,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,包括:确定所述质谱仪的当前振动参数和标定振动参数;确定振动参数差值和振动参数阈值,所述振动参数差值为所述当前振动参数和所述标定振动参数的差值;在所述振动参数差值小于所述振动参数阈值时,增大所述走航车的行驶速度直到所述行驶速度达到所述预设速度;在所述振动参数差值大于或等于所述振动参数阈值时,逐渐降低所述走航车的行驶速度。
8、一些实施例中,所述当前振动参数是根据在预定时间确定的所述质谱仪的加速度数据,进行fft变换获得的平均加速度频谱。
9、一些实施例中,所述标定振动参数是根据所述走航车在预设路径运行预设时长时所述质谱仪的加速度数据进行fft变换后,确定的最大加速度频谱。
10、一些实施例中,所述走航监测车还包括车载电源和后备电源,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,还包括:控制所述车载电源对所述质谱仪供电;确定所述质谱仪的当前供电参数和设定供电参数;确定所述质谱仪是否断电,所述质谱仪是否断电是根据所述当前供电参数和所述设定供电参数比较确定的;在确定所述质谱仪断电时控制所述后备电源供电。
11、一些实施例中,所述在确定所述质谱仪断电时控制所述后备电源供电后,还包括:关闭所述质谱仪的进样管路;控制所述质谱仪内的各模块断电;控制所述质谱仪的分子泵停机,并在所述分子泵转速降为零后控制所述质谱仪的机械泵停机。
12、一些实施例中,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,还包括:确定所述质谱仪的当前真空度和设定真空度;确定真空度差值和真空度阈值,所述真空度差值为所述当前真空度和所述设定真空度的差值;在所述质谱仪内的真空度达到所述设定真空度,或所述质谱仪的真空泵运行预定时长未能达到所述设定真空度后,如果所述真空度差值大于或等于所述真空度阈值,则确定所述质谱仪处于异常工作状态,控制所述真空泵停机。
13、一些实施例中,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,还包括:确定所述质谱仪中设定模块的当前电压和设定电压,所述设定模块包括真空泵、电离源、四级杆、离子透镜、加速器以及检测器中的至少一个;确定电压差值和电压阈值范围,所述电压差值为所述当前电压与所述设定电压的差值;如果在所述电压差值不在所述电压阈值范围,则确定所述质谱仪处于异常工作状态,控制所述设定模块断电。
14、一些实施例中,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,还包括:确定所述质谱仪的分子泵的当前温度、第一温度阈值和第二温度阈值;在所述当前温度小于第一温度阈值时,控制所述分子泵维持;在所述当前温度不小于第一温度阈值且不大于第二温度阈值时,控制散热器对所述分子泵散热;在所述当前温度大于第二温度阈值时,控制所述分子泵停机。
15、一些实施例中,所述确定所述质谱仪的初始运行参数和当前运行参数,确定所述质谱仪是否处于异常运行状态,并根据所述异常运行状态控制所述走航车和所述质谱仪,还包括:确定所述质谱仪的机械泵的当前温度、第三温度阈值和第四温度阈值;在所述当前温度小于第三温度阈值时,控制所述机械泵维持;在所述当前温度不小于第三温度阈值且不大于第四温度阈值时,控制散热器对所述机械泵散热;在所述当前温度大于第四温度阈值时,关闭所述质谱仪的进样管路、控制所述质谱仪的各模块断电、控制所述质谱仪的分子泵停机,并在所述分子泵停机后控制所述机械泵停机。
16、一些实施例中,所述预设路线、所述预设速度以及所述初始运行参数中的至少一个是通过接收无线终端信号确定的。
17、一些实施例中,所述走航车的当前位置、所述走航车的当前速度、所述质谱仪的当前运行参数以及所述质谱仪的异常运行状态中的至少一个通过无线通讯的方式发送到无线终端。
18、根据本发明实施例的走航监测车的控制装置,所述控制装置包括:检测单元,所述检测单元用于检测所述走航车的当前位置、所述走航车的当前速度、所述质谱仪的当前运行参数中的至少一个;执行单元,所述执行单元用于控制所述走航车以及所述质谱仪;控制单元,所述控制单元与所述检测单元和所述执行单元信号传输,并设置为用于执行根据前述的走航监测车的控制方法的步骤。
19、一些实施例中,所述控制装置还包括无线通讯单元,所述无线通讯单元与所述控制单元信号传输,并用于接收和发送无线信号。
20、一些实施例中,所述执行单元包括进样管和夹管阀,所述进样管用于所述质谱仪进样,所述夹管阀与所述进样管相连,用于打开和关闭所述进样管,所述夹管阀与所述控制单元信号传输。
21、一些实施例中,所述执行单元包括真空泵和散热器,所述检测单元包括温度检测元件,所述温度检测元件被构造成检测所述真空泵的温度,所述真空泵用于所述质谱仪内抽真空,所述散热器用于所述真空泵散热,所述控制单元分别与所述温度检测元件和所述散热器信号传输,并根据所述温度检测元件的检测值控制所述散热器运行,所述真空泵包括分子泵和机械泵中的至少一个。
22、一些实施例中,所述检测单元包括第一真空规,所述第一真空规与所述质谱仪的电离源相连,用于采集所述质谱仪的前级真空度。
23、一些实施例中,所述检测单元还包括第二真空规,所述第二真空规与所述质谱仪的质量分析器相连,用于检测所述质谱仪的后级真空度。
24、一些实施例中,所述检测单元还包括电压传感器,所述电压传感器与质谱仪相连,用于采集所述质谱仪内电离源、四级杆、离子透镜、加速器、反射器以及检测器中至少一个的供电电压。
25、一些实施例中,所述检测单元还包括加速度传感器,所述加速度传感器用于检测所述质谱仪底座的垂向加速度,所述控制单元与所述加速度传感器信号传输。
26、一些实施例中,所述检测单元还包括位置传感器,所述位置传感器用于检测所述走航车的位置,所述控制单元与所述位置传感器信号传输。
27、一些实施例中,所述控制单元包括下位机处理器、通讯装置、上位机和无线通讯单元,所述检测单元和所述执行单元与所述下位机处理器信号传输,所述上位机与所述无线通讯单元通讯,且所述上位机通过所述通讯装置与所述下位机处理器通讯。
28、根据本发明实施例的走航监测车,包括:走航车;质谱仪,所述质谱仪设于所述走航车上;控制装置,所述控制装置分别与所述走航车和所述质谱仪信号传输,所述控制装置配置为用于执行根据前述的走航监测车的控制方法的步骤。
- 还没有人留言评论。精彩留言会获得点赞!