制导飞行器速度控制方法及系统与流程
本发明涉及智能制造中一般的控制或调节系统,尤其涉及一种制导飞行器速度控制方法及系统。
背景技术:
1、制导飞行器在飞行过程中,飞行速度在较长时间内维持在跨音速度段。跨音速段的空气动力学十分复杂,飞行器气动特性呈现出很强的非线性特征,导致飞行器阻力剧增、升力下降、操纵恶化,传感器元件测量精度降低;结构强度下降、严重时损坏部分组件。
2、飞行器速度控制方法主要有两种,一是增加使用攻角,这种方式速度控制精度不高,另外使本来处于亚速度区速度也相应下降,无故损失能量;二是自动驾驶仪采用高度控制回路,实现速度控制,这种方式要求飞行器升力大于重力。
技术实现思路
1、本发明目的在于公开一种制导飞行器速度控制方法及系统,以提高控制的有效性和精度。
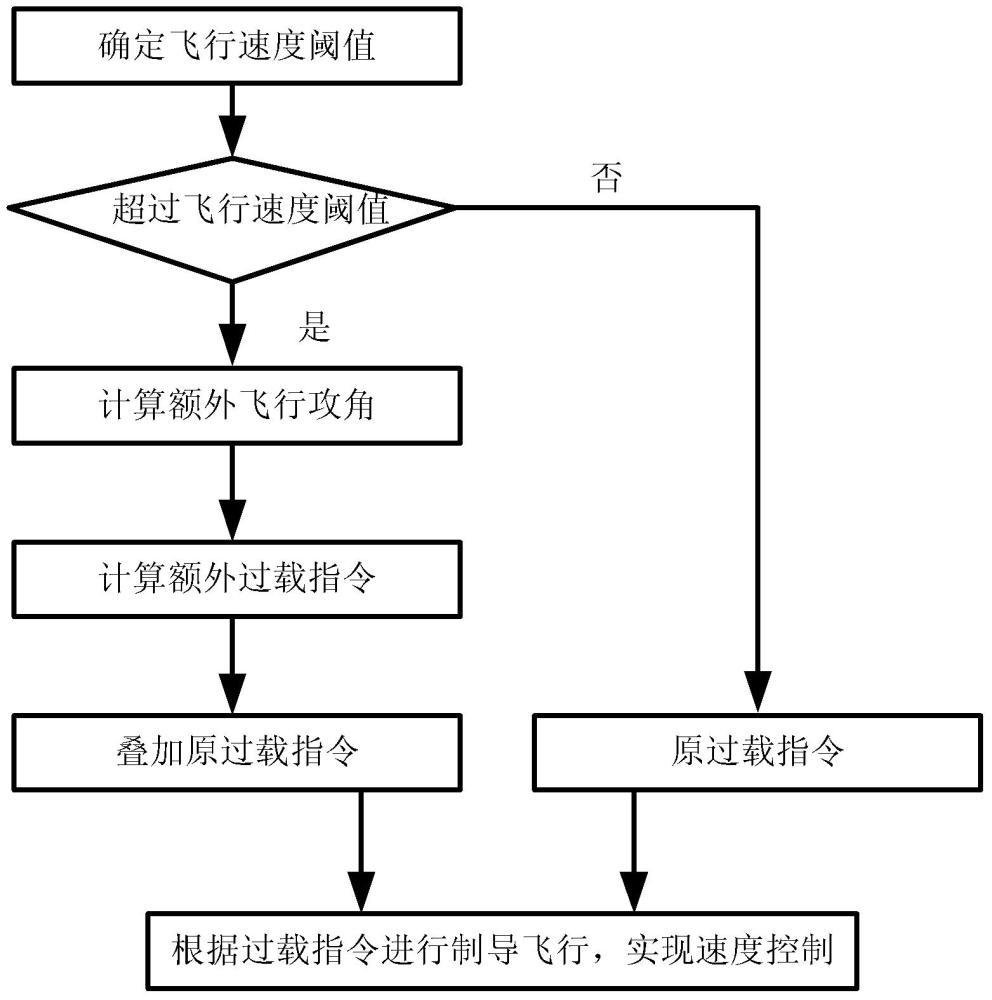
2、为达上述目的,本发明方法包括步骤s1至步骤s4。
3、步骤s1、通过风洞试验确定不产生激波和波阻的飞行速度阈值。
4、步骤s2、检测当前的飞行速度是否大于所述飞行速度阈值,如果是,执行后续控制流程;否则,等待在下一次检测时间到来后,再重新检测相对应的飞行速度与所述飞行速度阈值的大小关系。
5、步骤s3、计算将当前飞行速度阈值降至所述飞行速度阈值所需阻力对应的额外飞行攻角。
6、步骤s4、计算所述额外飞行攻角所对应的额外过载指令,将该额外过载指令与原过载指令叠加后得到本次速度控制所对应的目标过载指令;然后再根据所述目标过载指令进行速度控制。
7、其中,所述步骤s3包括下述步骤s31至步骤s35。
8、步骤s31、实时计算完成速度控制额外的阻力。
9、;
10、其中:为飞行器质量,为速度控制的调节时间,为飞行器原飞行速度,为飞行速度阈值。
11、步骤s32、实时计算飞行攻角。
12、;
13、其中,为速度矢量在体坐标系下的分量。
14、步骤s33、实时计算未采用速度控制方案的飞行阻力。
15、;
16、其中:为大气密度,为飞行器参考面积,为飞行器速度与攻角对应的阻力系数。
17、步骤s34、实时计算期望的飞行阻力,。
18、步骤s35、根据计算飞行器阻力系数,基于为对应速度的马赫数与攻角的函数,根据确定对应的飞行攻角。
19、其中,根据计算的具体公式为:。
20、步骤s34、计算额外飞行攻角;。
21、优选地,所述步骤s4包括下述步骤s41至步骤s43。
22、步骤s41、计算额外飞行攻角所对应的额外过载指令;
23、;
24、其中:为飞行器升力系数对飞行攻角的偏导数。
25、步骤s42、计算原过载指令;
26、;
27、其中:为比例导引律系数,分别为视线坐标系下前向与法向速度,为飞行器与目标点的距离;当时,采用该原过载指令进行制导飞行。
28、步骤s43、当时,计算采用速度控制方案所需的过载指令;
29、。
30、为达上述目的,本发明还公开一种制导飞行器速度控制系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
31、本发明具有的有益效果包括:原理简单,工程应用性强,在检测当前的飞行速度大于飞行速度阈值才启动速度控制,确保了控制的有效性;在具体的控制过程中,根据飞行器的固有信息计算出减速控制需要的额外的法向过载指令,通过过载的反馈控制实现速度控制,确保了控制的精度,使得实际效果良好。
32、下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种制导飞行器速度控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述步骤s4包括:
3.一种制导飞行器速度控制系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1或2所述的方法。
技术总结
本发明涉及智能制造中一般的控制或调节系统,公开一种制导飞行器速度控制方法及系统,以提高控制的有效性和精度。方法包括:步骤S1、通过风洞试验确定不产生激波和波阻的飞行速度阈值;步骤S2、检测当前的飞行速度是否大于所述飞行速度阈值,如果是,执行后续控制流程;否则,等待在下一次检测时间到来后,再重新检测相对应的飞行速度与所述飞行速度阈值的大小关系;步骤S3、计算将当前飞行速度阈值降至所述飞行速度阈值所需阻力对应的额外飞行攻角;步骤S4、计算所述额外飞行攻角所对应的额外过载指令,将该额外过载指令与原过载指令叠加后得到本次速度控制所对应的目标过载指令;然后再根据所述目标过载指令进行速度控制。
技术研发人员:凡建超,张琼,鱼小军,高晨阳,杨跃,张飞飞,周建军,杨浩瀚,肖斌,魏菊仙,刘碧瑜
受保护的技术使用者:湖南云箭科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!