一种移动机器人轮速最速控制系统的过程给定方法及装置与流程
本发明涉及机器人控制的,特别是涉及一种移动机器人轮速最速控制系统的过程给定方法及装置。
背景技术:
1、在工业过程控制实践中,工程研究人员发明出一种加速型工程最速比例-积分(accelerated engineering fastest proportional-integral,aefpi)控制器;aefpi适合单独运用,相对比例-积分-微分(proportional-integral,pi)控制性能的提升幅度是足够的。aefpi技术已经在火电机组调峰、调频领域进行了规模化推广应用。
2、但在实践中发现,aefpi控制的过程超调量较大,这是aefpi控制的固有特性;将aefpi应用于移动机器人轮速最速控制系统,会出现较大的过程超调,会影响移动机器人工作鲁棒性,通常在过程给定端接入一个一阶惯性滤波器(first order inertial filter,foif)对抑制过程超调有较好的作用;然而,这种简单的处理方法明显降低了aefpi控制的调节性能。
技术实现思路
1、本发明要解决的技术问题是:提供一种移动机器人轮速最速控制系统的过程给定方法及装置,能减少过程超调,提高移动机器人轮速最速控制系统的性能。
2、为了解决上述技术问题,本发明提供了一种移动机器人轮速最速控制系统的过程给定方法,包括:
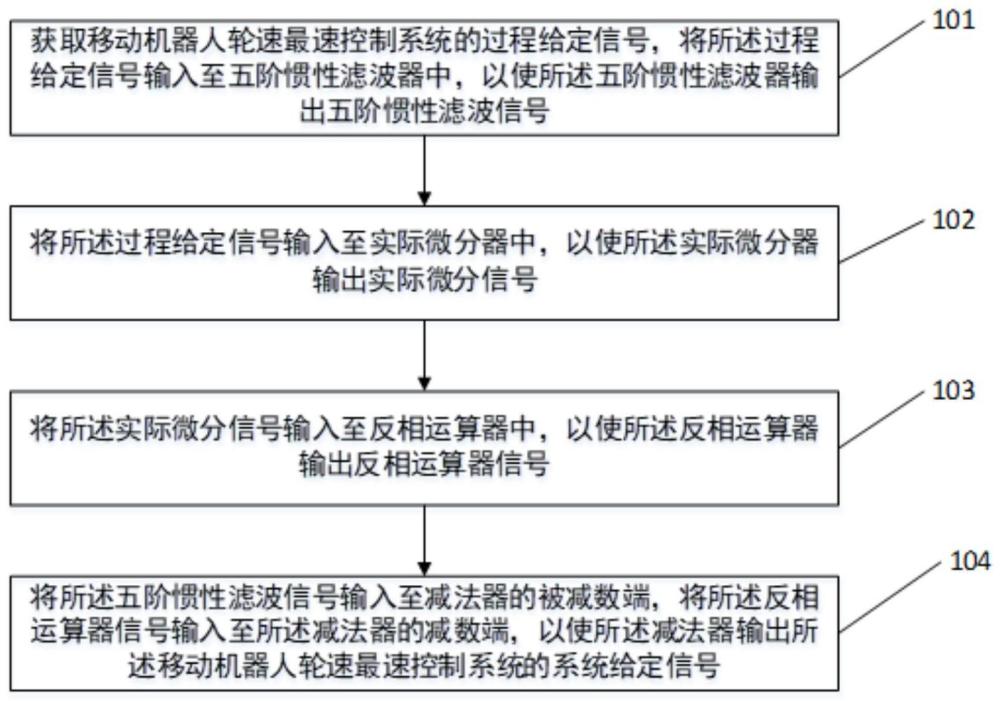
3、获取移动机器人轮速最速控制系统的过程给定信号,将所述过程给定信号输入至五阶惯性滤波器中,以使所述五阶惯性滤波器输出五阶惯性滤波信号;
4、将所述过程给定信号输入至实际微分器中,以使所述实际微分器输出实际微分信号;
5、将所述实际微分信号输入至反相运算器中,以使所述反相运算器输出反相运算器信号;
6、将所述五阶惯性滤波信号输入至减法器的被减数端,将所述反相运算器信号输入至所述减法器的减数端,以使所述减法器输出所述移动机器人轮速最速控制系统的系统给定信号。
7、在一种可能的实现方式中,所述五阶惯性滤波器,如下所示:
8、
9、式中,ffoif(s)为五阶惯性滤波器的拉普拉斯传递函数,tfoif为五阶惯性滤波器的时间常数,单位为毫秒。
10、在一种可能的实现方式中,所述实际微分器,如下所示:
11、
12、式中,fad(s)为实际微分器的拉普拉斯传递函数,kad为实际微分器的比例增益,单位为无量纲,tad为实际微分器的时间常数,单位为毫秒。
13、在一种可能的实现方式中,所述反相运算器,如下所示:
14、fro(s)=-1;
15、式中,fro(s)为反相运算器的拉普拉斯传递函数,为-1系数。
16、本发明还提供了一种移动机器人轮速最速控制系统的过程给定装置,包括:五阶惯性滤波器、实际微分器、反相运算器和减法器;
17、其中,所述五阶惯性滤波器,用于接收过程给定信号输出端输入的移动机器人轮速最速控制系统的过程给定信号,对所述过程给定信号进行五阶惯性滤波处理,输出五阶惯性滤波信号,并将所述五阶惯性滤波信号输入至所述减法器的被减数端中;
18、所述实际微分器,用于接收过程给定信号输出端输入的移动机器人轮速最速控制系统的过程给定信号,对所述过程给定信号进行实际微分处理,输出实际微分信号,并将所述实际微分信号输入至所述反相运算器;
19、所述反相运算器,用于对输入的所述实际微分信号进行反相运算处理,得到反相运算信号,并将所述反相运算信号输入至所述减法器的减数端中;
20、所述减法器,用于对输入的所述五阶惯性滤波信号和所述反相运算信号进行减法处理,输出所述移动机器人轮速最速控制系统的系统给定信号。
21、在一种可能的实现方式中,所述过程给定装置的表达式,如下所示:
22、
23、式中,fefcagv(s)为移动机器人轮速最速控制系统的过程给定装置的拉普拉斯传递函数,fro(s)为反相运算器的传递函数,系数为-1,fad(s)为实际微分器的拉普拉斯传递函数,tad为实际微分器的时间常数,单位为毫秒,kad为实际微分器的增益,单位为无量纲,ffoif(s)为五阶惯性滤波器的拉普拉斯传递函数,tfoif为五阶惯性滤波器的时间常数,单位为毫秒。
24、在一种可能的实现方式中,所述五阶惯性滤波器,如下所示:
25、
26、式中,ffoif(s)为五阶惯性滤波器的拉普拉斯传递函数,tfoif为五阶惯性滤波器的时间常数,单位为毫秒。
27、在一种可能的实现方式中,所述实际微分器,如下所示:
28、
29、式中,fad(s)为实际微分器的拉普拉斯传递函数,kad为实际微分器的比例增益,单位为无量纲,tad为实际微分器的时间常数,单位为毫秒。
30、在一种可能的实现方式中,所述反相运算器,如下所示:
31、fro(s)=-1;
32、式中,fro(s)为反相运算器的拉普拉斯传递函数,为-1系数。
33、在一种可能的实现方式中,所述过程给定信号输出端与所述五阶惯性滤波器的输入端相连接,所述五阶惯性滤波器的输出端与所述减法器的被减数端相连接,所述过程给定信号输出端与所述实际微分器的输入端相连接,所述实际微分器的输出端与所述反相运算器的输入端相连接,所述反相运算器的输出端与所述减法器的减数端相连接。
34、本发明还提供了一种移动机器人轮速最速控制系统,包括:如上述任意一项所述的移动机器人轮速最速控制系统的过程给定装置、反馈单元、加速型工程最速比例-积分控制器和过程;
35、其中,所述过程给定装置的输出端与所述反馈单元的第一输入端相连接,所述反馈单元的输出端与所述加速型工程最速比例-积分控制器相连接,所述加速型工程最速比例-积分控制器的输出端与所述过程的输入端相连接,所述过程的输出端与所述反馈单元的第二输入端相连接,形成闭环反馈;
36、所述过程给定装置,用于执行如上述任意一项所述的移动机器人轮速最速控制系统的过程给定方法。
37、在一种可能的实现方式中,所述加速型工程最速比例-积分控制器,如下所示:
38、faefpi(s)=kaefpi[1+faefi(s)];
39、
40、
41、taefi=taeftf;
42、式中,faefpi(s)为加速型工程最速比例-积分控制器aefpi的传递函数,kaefpi为串级比例控制增益,单位为无量纲,faefi(s)为加速型工程最速积分器afei的传递函数,faeftf(s)为加速型工程最速跟踪滤波器aeftf的传递函数,taefi为加速型工程最速积分器的时间常数,单位为毫秒,taeftf为加速型工程最速跟踪滤波器的时间常数,单位为毫秒,n为阶次,单位无量纲;i和l为过程变量,为正整数。
43、本发明还提供了一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上述任意一项所述的移动机器人轮速最速控制系统的过程给定。
44、本发明实施例一种移动机器人轮速最速控制系统的过程给定方法及装置,与现有技术相比,具有如下有益效果:
45、通过获取移动机器人轮速最速控制系统的过程给定信号,将所述过程给定信号输入至五阶惯性滤波器中,以使所述五阶惯性滤波器输出五阶惯性滤波信号;通过五阶惯性滤波器对输入信号进行平滑处理,消除噪声和突发波动,从而得到更加稳定和可靠的输出信号;有助于减少控制系统对干扰的敏感性,提高系统的稳定性和鲁棒性;将所述过程给定信号输入至实际微分器中,以使所述实际微分器输出实际微分信号,能反映移动机器人的实际状态变化情况;将所述实际微分信号输入至反相运算器中,以使所述反相运算器输出反相运算器信号,能用于控制系统的反相调整;将所述五阶惯性滤波信号输入至减法器的被减数端,将所述反相运算器信号输入至所述减法器的减数端,以使所述减法器输出所述移动机器人轮速最速控制系统的系统给定信号;与现有技术相比,本发明的技术方案通过设置五阶惯性滤波器、实际微分器、反相运算器和减法器,对输入信号进行于滤波、微分和反相处理等,以使得到的系统给定信号具有更好的稳定性和鲁棒性;有助于确保控制系统对速度变化做出准确和可靠的响应,能减少过程超调,提高系统的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!