一种控制系统中过程超调的抑制方法、装置及控制系统与流程
本发明涉及工业过程的控制,尤其涉及一种控制系统中过程超调的抑制方法、装置及控制系统。
背景技术:
1、随着科技的发展,在工业过程控制实践中,工程研究人员发明出一种工程最速控制器(engineering fastest controller,efc),用于提高工业过程中的反馈控制性能,其中,加速型工程最速比例-积分(accelerated engineering fastest proportional-integral,aefpi)控制器属于工程最速控制器(efc)范畴,随着工程研究人员将所述aefpi应用于工业过程控制中,发现所述aefpi适合单独运用,但其相对于现有技术中的比例-积分(proportional-integral,pi)控制器,能大幅度提升所述反馈控制性能。
2、但是工程研究人员在实践中发现,所述aefpi控制的过程超调量较大,这是aefpi控制的固有特性,研究人员将aefpi应用于工业机器人关节位置最速控制系统中时,因工业机器人关节位置最速控制系统不允许出现较大的过程超调,通常在过程给定端接入一个一阶惯性滤波器(first order inertial filter,foif)对过程中的超调进行抑制。然而,接入一阶惯性滤波器会明显降低所述aefpi控制的调节性能,进而降低工业过程中的反馈控制性能。
技术实现思路
1、为了解决上述技术问题,本发明公开了一种控制系统中过程超调的抑制方法、装置及控制系统,用于提高控制系统中加速型工程最速比例-积分控制器的调节性能。
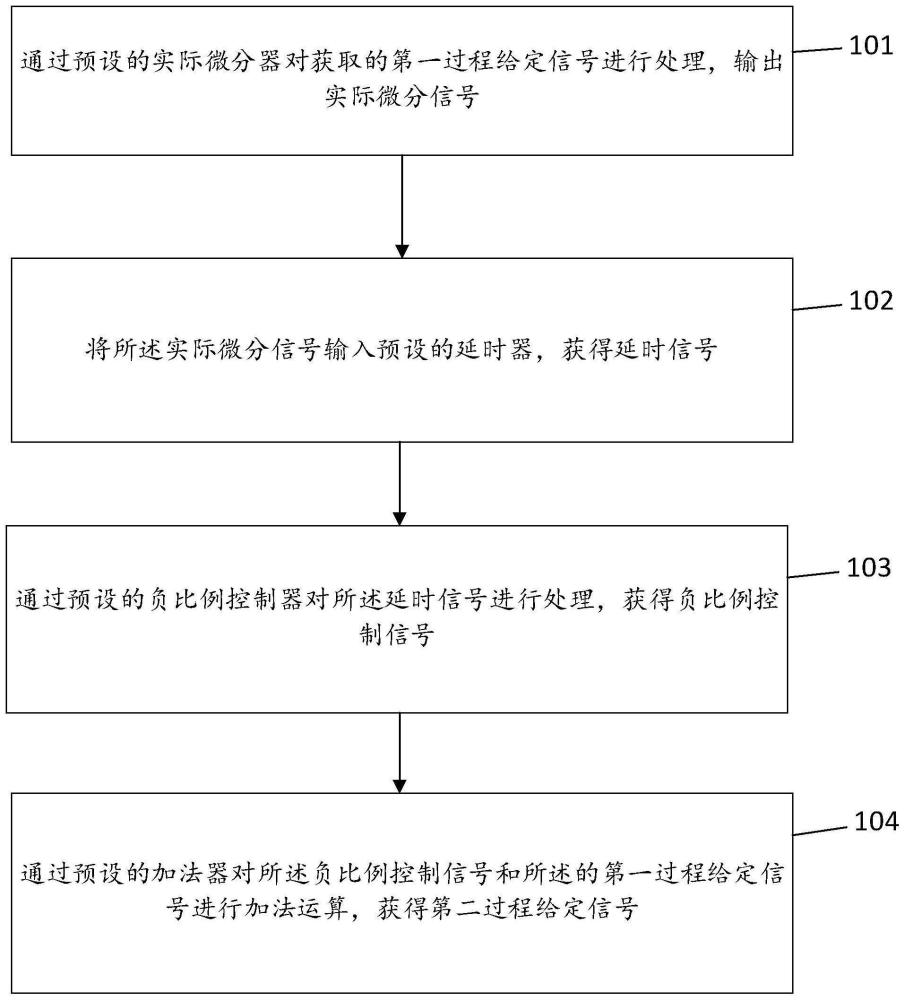
2、为了实现上述目的,第一方面,本发明公开了一种控制系统中过程超调的抑制方法,包括:
3、通过预设的实际微分器对获取的第一过程给定信号进行处理,输出实际微分信号;
4、将所述实际微分信号输入预设的延时器,获得延时信号;
5、通过预设的负比例控制器对所述延时信号进行处理,获得负比例控制信号;
6、通过预设的加法器对所述负比例控制信号和所述的第一过程给定信号进行加法运算,获得第二过程给定信号。
7、本发明公开的一种控制系统中过程超调的抑制方法,首先通过预设的微分器对待处理的第一过程给定信号进行微分处理,以使提高所述信号抗干扰的能力,进而提高超调抑制的效果,接着利用延时器对微分处理后获得的实际微分信号进行延时处理,以使保证所述过程超调抑制的效果,接着利用负比例控制器根据当前控制系统中的偏差生成延时处理后获得的延时信号对应的负比例控制信号,结合所述负比例控制信号及所述第一过程给定信号生成新的过程给定信号,结合当前控制系统的控制性能进行超调抑制,提高超调抑制的效果,同时利用所述加法器可提高所述加速型工程最速比例-积分控制器的调节性能,在实现对控制系统中的过程超调进行抑制的同时,避开了使用一阶惯性滤波器,可提高所述控制系统中加速型工程最速比例-积分控制器的调节性能。
8、作为优选例子,在所述通过预设的实际微分器对获取的第一过程给定信号进行处理,输出实际微分信号,包括:
9、将所述第一过程给定信号输入至所述实际微分器,通过所述实际微分器输出所述实际微分信号;其中,所述实际微分器为:
10、ad(s)=id(s)soif(s)
11、id(s)=tds
12、
13、其中,所述ad(s)为所述实际微分器的传递函数;所述id(s)为理想微分器的传递函数;所述td为所述理想微分器的时间常数,单位为ms;所述soif(s)为二阶惯性滤波器的传递函数;所述tsoif为所述二阶惯性滤波器的时间常数,单位为ms;其中,所述tsoif=td。
14、本发明利用所述实际微分器对获取的待处理的第一过程给定信号进行微分处理,用于保证所述信号中的信息量时提高所述信号的抗干扰性,提高过程超调抑制的效果。
15、作为优选例子,在所述将所述实际微分信号输入预设的延时器,获得延时信号,包括:
16、通过所述延时器对所述实际微分信号进行处理,输出所述延时信号;其中,所述延时器为:
17、flo(s)=e-τs
18、其中,所述flo(s)为所述延时器的拉普拉斯传递函数;所述τ为所述延时器的延时常数,单位为ms。
19、本发明利用所述延时器生成所述实际微分信号的延时信号,以使后期有充足的时间进行过程超调的抑制,提高超调抑制的效果。
20、作为优选例子,在所述通过预设的负比例控制器对所述延时信号进行处理,获得负比例控制信号,包括:
21、将所述延时信号输入至所述负比例控制器,通过所述负比例控制器输出所述负比例控制信号;其中,所述负比例控制器为:
22、npc(s)=knpc
23、-1≤knpc≤0
24、其中,所述npc(s)为所述负比例控制器的传递函数;所述knpc为所述负比例控制器的增益,单位为无量纲。
25、本发明利用所述负比例控制器生成所述延时信号对应的负比例控制信号,以使根据所述负比例控制信号对所述第一过程给定信号进行超调抑制处理,同时生成所述负比例控制信号进行超调抑制贴合所述最速比例-积分控制器,可提高所述控制器的调节性能。
26、第二方面,本发明公开了一种控制系统中过程超调的抑制装置,所述装置包括实际微分处理模块、延时处理模块、负比例控制模块及超调抑制模块;
27、所述实际微分处理模块用于通过预设的实际微分器对获取的第一过程给定信号进行处理,输出实际微分信号;
28、所述延时处理模块用于将所述实际微分信号输入预设的延时器,获得延时信号;
29、所述负比例控制模块用于通过预设的负比例控制器对所述延时信号进行处理,获得负比例控制信号;
30、所述超调抑制模块用于通过预设的加法器对所述负比例控制信号和所述的第一过程给定信号进行加法运算,获得第二过程给定信号。
31、本发明公开的一种控制系统中过程超调的抑制装置,首先通过预设的微分器对待处理的第一过程给定信号进行微分处理,以使提高所述信号抗干扰的能力,进而提高超调抑制的效果,接着利用延时器对微分处理后获得的实际微分信号进行延时处理,以使保证所述过程超调抑制的效果,接着利用负比例控制器根据当前控制系统中的偏差生成延时处理后获得的延时信号对应的负比例控制信号,结合所述负比例控制信号及所述第一过程给定信号生成新的过程给定信号,结合当前控制系统的控制性能进行超调抑制,提高超调抑制的效果,同时利用所述加法器可提高所述加速型工程最速比例-积分控制器的调节性能,在实现对控制系统中的过程超调进行抑制的同时,避开了使用一阶惯性滤波器,可提高所述控制系统中加速型工程最速比例-积分控制器的调节性能。
32、第三方面,本发明公开了一种工业机器人关节最速控制系统,包括工业机器人控制过程超调抑制装置、反馈单元、加速型工程最速比例-积分控制器和过程;其中,所述工业机器人控制过程超调抑制装置执行如第一方面所述的任一项一种控制系统中过程超调的抑制方法;
33、其中,所述工业机器人控制过程超调抑制装置与所述反馈单元相连,所述反馈单元获得所述工业机器人控制过程超调抑制装置与所述过程输出的反馈信号;所述反馈单元与所述加速型工程最速比例-积分控制器相连,所述加速型工程最速比例-积分控制器获得所述反馈单元输出的控制信号;所述加速型工程最速比例-积分控制器与所述过程相连,所述过程获得所述加速型工程最速比例-积分控制器输出的过程输出信号;所述过程输出信号与所述反馈单元相连,形成闭环反馈。
34、本发明公开的一种工业机器人关节最速控制系统,采用执行第一方面所述的超调抑制方法的抑制装置生成过程给定信号,且所述最速控制系统中的加速型工程最速比例-积分控制器通过所述反馈单元与所述工业机器人控制过程超调抑制装置相连,使得通过所述工业机器人控制过程超调抑制装置进行过程超调的抑制,提高所述加速型工程最速比例-积分控制器的调节性能。
35、作为优选例子,所述加速型工程最速比例-积分控制器,表达为:
36、faefpi(s)=kaefpi[1+faefi(s)],
37、
38、
39、taefi=taeftf
40、其中,所述faefpi(s)为所述加速型工程最速比例-积分控制器的传递函数,所述kaefpi为串级比例控制增益,单位为无量纲,所述faefi(s)为加速型工程最速积分器的传递函数,所述faeftf(s)为加速型工程最速跟踪滤波器的传递函数,所述taefi为所述加速型工程最速积分器的时间常数,单位为ms;taeftf为所述加速型工程最速跟踪滤波器的时间常数,单位为ms;,n为阶次,单位为无量纲,i和l为过程变量,均为正整数。
41、本发明利用所述加速型工程最速比例-积分控制器可提高控制系统的控制性能。
42、第四方面,本发明公开了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现如第一方面所述的一种控制系统中过程超调的抑制方法。
43、第五方面,本发明公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的一种控制系统中过程超调的抑制方法。
- 还没有人留言评论。精彩留言会获得点赞!