一种前馈自学习方法及基于前馈自学习实现的LCC控制方法与流程
本发明涉及自动驾驶,具体为一种前馈自学习方法及基于前馈自学习实现的lcc控制方法。
背景技术:
1、车辆驾驶时为了降低和相邻车道的车辆碰撞的概率,通常将车辆开在当前车道的中间。而在随着汽车电气化和智能化的快速普及,车道居中辅助功能(lcc)成为越来越多汽车的标配功能。现有的车道居中辅助功能的方向盘转角指令一般由两部分构成:前馈部分和反馈部分。
2、关于前馈部分的计算方法,现有技术中通常利用阿克曼转向几何理论将四轮汽车简化为二轮自行车模型,如图2所示,前轮轴心1和后轮轴心2之间的轴距为l;当前弯道的半径为r,也是车辆转弯半径;前轮转向角为δ,弧线3为以r为半径的目标弯道。而汽车方向盘的理论转向角的计算方法为:
3、前馈角θffbasic= g*δ= g *arctan(l*curv)。其中,curv为曲率curv=1/r,g为前轮转向角δ和方向盘的前馈角的传动比,具体数据与车辆中传动齿轮的参数相关。通过计算可以获得自车通过转弯半径为r的路段的理论转向角:前馈θffbasic。
4、但是,实际车辆行驶时,只考虑前馈角θffbasic进行转向是不能将车辆控制在当前车道的中间位置的,还需要考虑车辆行驶方向与当前目标车道的两个偏差:车辆横向偏差dy,即当前车辆是与道路中轴线是偏左还是偏右,以及车辆航向偏差dc1,即车辆航向和目标路径方向切线的夹角。如图2所示,现有技术中通常会基于pid(proportional-integral-derivativecontrol,比例积分微分控制)技术构建计算模块,通过输入的车辆横向偏差dy和车辆航向偏差dc1计算得出反馈角θfb,用来调整前馈角θffbasic的偏差,即:
5、调整后转向角 = θffbasic+θfb。
6、但是,由于目前的车辆前馈模型均为简化二轮自行车模型,模型误差不可避免,所以在实践中发现现有技术中将四轮汽车模型简化为二轮自行车模型的方法,在不同车速、不同弯道半径下仍然存在模型误差,导致会出现计算得到的θffbasic不准的问题。虽然现有技术中已经引入了θfb负责对驾驶过程中可能出现的风阻、路面颠簸、外部干扰等扰动的修正,但是前馈角θffbasic的模型偏差已经超过的θfb修正能力上限,从而导致控制策略的失败。体现在车辆行驶上,就是转向角会大幅波动,导致车辆行驶出现震荡,会使汽车在lcc过弯时出现画龙,影响了驾驶舒适性甚至引发安全问题。而为了弥补前馈角θffbasic的模型误差,通常在车辆lcc系统研发阶段需要投入大量人力进行实验和调试,极大地提高了研发成本。
技术实现思路
1、为了解决现有的基于简化二轮自行车模型计算前馈θffbasic结果不够精准的问题,本发明提供一种前馈自学习方法,其可以有效的解决由于四轮汽车模型简化为二轮自行车模型带来的建模误差,且可以降低系统研发成本。同时本技术还公开一种基于前馈自学习实现的lcc控制方法。
2、本发明的技术方案是这样的:一种前馈自学习方法,其特征在于,其包括以下步骤:
3、s1:构建lcc的转向角的角度规划方法:
4、θ = θff+ θfb= kffθffbasic+ θfb;
5、其中,θ为lcc的转向角的角度规划,θfb为反馈角,θffbasic为前馈角,θff为前馈角度规划;kff为前馈模型修正系数;
6、s2:构建二维变量空间,横坐标车道线曲率curv,纵坐标为车速vehspd,每一个车道线曲率curv和车速vehspd对应一个前馈模型修正系数kff;
7、kff= map(vehspd, curv);
8、kff的取值在所述二维变量空间中基于车速vehspd和车道线曲率curv进行查询;map()为二维变量空间的查询方法;
9、s3:将所有的前馈模型修正系数kff都初始化为默认值;
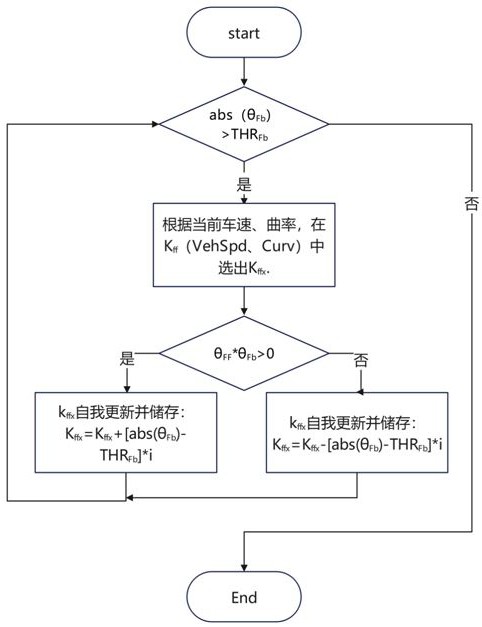
10、s4:读取待测试车辆当前的反馈角θfb和预设的反馈角阈值thrfb;
11、如果abs(θfb)>thrfb,则判断当前θff不合适,执行步骤s5;
12、否则,判断当前θff为合适的值,停止对当前的前馈角度规划的调整;
13、其中,thrfb为大于0的角度值;
14、s5:读取待测试车辆当前的θffbasic值;
15、读取待测试车辆当前的车速vehspd,以及基于当前所在车道对应的车道线曲率curv,在所述二维变量空间找到对应的kffx;
16、计算得到控制车辆当前的前馈角规划:θff= kffxθffbasic;
17、s6:通过θff*θfb的符号判断θff是偏大还是偏小;
18、当θff*θfb>0时,表示θfb在补充θff,θff偏小,需要增大kffx,执行步骤s7;
19、当θff*θfb<0时,表示θfb在缩减θff,θff偏大,需要减小kffx,执行步骤s8;
20、s7:将增大调整后的kffx记作kffx",并将kffx"的值存储到所述二维变量空间kffx的位置;并循环执行步骤s4~s6;
21、调整增大kffx的方法为:
22、kffx" = kffx+[abs(θfb)-thrfb]*i;其中,i为转化比率,0<i<1;
23、s8:将减小调整后的kffx记作kffx",并将kffx"的值存储到所述二维变量空间kffx的位置;循环执行步骤s4~s6;
24、调整减小kffx的方法为:
25、kffx" = kffx-[abs(θfb)-thrfb]*i;其中,i为转化比率,0<i<1。
26、其进一步特征在于:
27、所述二维变量空间中,横坐标车道线曲率curv包括:0.0001、0.0005、0.001、0.00125、0.0017、0.0025、0.005、0.01和0.1;
28、所述二维变量空间中,纵坐标车速vehspd的取值为以0为起始的等差数列;
29、所述二维变量空间中,前馈模型修正系数kff的默认值为1。
30、一种基于前馈自学习实现的lcc控制方法,其特征在于,其包括以下步骤:
31、a1:根据待测试车辆的车型,选择二维变量空间中的纵坐标为车速vehspd的公差,以及根据带控制车辆的车型设置其最大的车速vehspd;
32、基于车速vehspd的最大车速和公差,得到所有的纵坐标值后,构建所述二维变量空间;
33、a2:将所述二维变量空间中所有的kff都初始化为默认值;
34、a3:根据待测试车辆的车型,设置其对应的反馈角阈值thrfb和转化比率i;
35、a4:在二维变量空间的所有纵坐标中,选择出厂前测试场景;
36、所述出厂前测试场景包括:出厂前测试车速和出厂前车道线曲率;
37、a5:在待测试车辆出厂前,基于前馈自学习方法完成所有针对所述出厂前测试场景的kff的计算;其余纵坐标车速vehspd对应的kff的计算在车辆出厂后在车辆实际运行期间完成。
38、其进一步特征在于:
39、步骤a5中,在车辆实际运行中,在弯道行驶时,实时获取当前车速,并判断当前车速是否属于所述二维变量空间的纵坐标值;
40、如果当前车速属于所述二维变量空间的纵坐标值,则判断当前车速对应的前馈模型修正系数kff是否为默认值,如果是默认值则执行步骤步骤s4~s8;否则,直接使用当前车速对应的前馈模型修正系数kff进行弯道居中控制;
41、如果当前车速不属于所述二维变量空间的纵坐标值,则将所有的相邻的两个纵向坐标记作一个区间组,找到到当前车速所属的区间,记作:目标区间;基于所属目标区间的的两个边界值对应的前馈模型修正系数kff,采用线性差值的方式计算得到当前车速所对应的前馈模型修正系数kff。
42、本技术提供的一种前馈自学习方法,其通过引入前馈模型修正系数kff来修正由于四轮汽车模型简化为二轮自行车模型带来的建模误差,车辆实际运行时使用修公正后的前馈角度规划θff替代θffbasic作为方向盘的转向角计算基础;前馈模型修正系数kff计算过程中,利用反馈规划角θfb的大小与方向作为评价指标,通过预设的反馈角阈值thrfb和θfb的比较判断当前的θff大小是否合适,进而判断是否需要调整规划θff,通过θfb和θff的补偿关系来对θff的值进行调整,进而得到前馈模型修正系数kff,整个修正过程无需人工记录数据和修改参数,不但效率高,且降低了出错的概率;对二维变量空间中的前馈模型修正系数kff的测定过程分为两部分,一部分针对出厂前测试场景,在出厂前完成,其余的在出厂后自动实施,无需在出厂前完成所有的前馈模型修正系数kff的测定,也避免了在出厂前构建所有的测试场景,降低了出厂前的工序,降低了整体研发成本;前馈模型修正系数kff基于其对应的车道线曲率curv和车速vehspd存储在二维变量空间中,后续在实际使用时,已经完成计算的部分,根据和车辆当前的车速和目标车道的车道线曲率直接调用前馈模型修正系数kff,与当前的实时前馈角θffbasic进行计算即可得到对应的前馈角度规划θff,而没有完成计算的kff,调用前馈自学习方法自动实施计算过程,避免了错标或者漏标的问题发生的概率。本方法中,在kff计算过程实施之前,根据待测试车辆的车型,指定反馈角阈值thrfb和转化比率i,确保计算结果更有针对性,符合待测试车辆的品控需求。
- 还没有人留言评论。精彩留言会获得点赞!