基于智能网络模型的飞行器预设性能滑模控制方法及装置
本发明涉及飞行器控制领域,特别是涉及一种基于智能网络模型的飞行器预设性能滑模控制方法及装置。
背景技术:
1、随着航天技术的迅速发展,高速飞行器的结构和任务需求越来越复杂,对控制系统的精度要求越来越高。由于高速飞行器飞行环境跨大空域宽速域,气动与气动热环境变化剧烈,飞行器动力学模型复杂呈现强非线性,且模型参数呈现强不确定性。因此,如果可以提高飞行器建模精度,既可以增强系统的鲁棒性与自适应性,又可以提升系统的控制精度。
2、传统飞行器动力学模型的结构参数和气动参数均为地面测试仿真后得到的拟合结果,在控制系统设计过程中均保持标称值不变。然而高速飞行器在飞行过程中受环境因素等诸多影响,模型参数呈现快时变性与强不确定性。传统控制器仅能保证飞行器飞行状态收敛,无法保证系统状态在设定时间按照预设状态收敛。而在实际飞行过程中,由于气推耦合与复杂环境因素的影响,需要考虑高速飞行器飞行过程中的瞬态与稳态性能,否则可能导致系统跟踪误差瞬时超调较大,产生过大攻角,从而无法维持吸气式发动机进气量,导致飞行过程发动机熄火。
技术实现思路
1、本发明的目的是提供一种基于智能网络模型的飞行器预设性能滑模控制方法及装置,可提高飞行器控制的鲁棒性和控制精度。
2、为实现上述目的,本发明提供了一种基于智能网络模型的飞行器预设性能滑模控制方法,包括如下步骤。
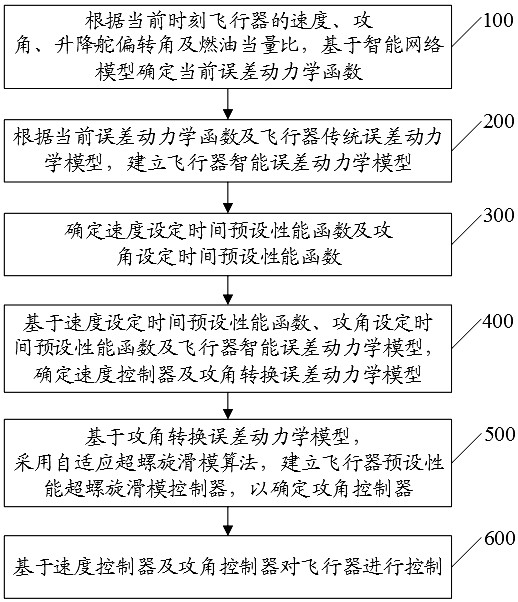
3、根据当前时刻飞行器的速度、攻角、升降舵偏转角及燃油当量比,基于智能网络模型确定当前误差动力学函数;所述智能网络模型为预先采用飞行器的历史飞行量测数据集对神经网络进行训练得到的;所述历史飞行量测数据集中包括历史设定时段内各时刻飞行器的速度、攻角、升降舵偏转角、燃油当量比及对应的误差动力学函数。
4、根据所述当前误差动力学函数及飞行器传统误差动力学模型,建立飞行器智能误差动力学模型。
5、确定速度设定时间预设性能函数及攻角设定时间预设性能函数。
6、基于所述速度设定时间预设性能函数、所述攻角设定时间预设性能函数及所述飞行器智能误差动力学模型,确定速度控制器及攻角转换误差动力学模型。
7、基于所述攻角转换误差动力学模型,采用自适应超螺旋滑模算法,建立飞行器预设性能超螺旋滑模控制器,以确定攻角控制器。
8、基于所述速度控制器及所述攻角控制器对飞行器进行控制。
9、为实现上述目的,本发明还提供了一种计算机装置,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述基于智能网络模型的飞行器预设性能滑模控制方法的步骤。
10、根据本发明提供的具体实施例,本发明公开了以下技术效果:使用智能网络模型对飞行器进行精确动力学建模,提升了飞行器智能误差动力学模型的精度,通过速度设定时间预设性能函数及攻角设定时间预设性能函数保证了飞行状态跟踪误差在设定时间收敛,提升了收敛速度与收敛精度,避免了初始时刻控制量过大的问题,针对攻角转换误差动力学模型,采用自适应超螺旋滑模算法建立飞行器预设性能超螺旋滑模控制器,以确定攻角控制器,避免了传统终端滑模的奇异问题并加快收敛速度,同时避免了控制增益过小导致控制发散与控制增益过大导致飞行器剧烈抖振的问题,提高了飞行器控制的鲁棒性和控制精度。
技术特征:
1.一种基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述基于智能网络模型的飞行器预设性能滑模控制方法包括:
2.根据权利要求1所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述当前误差动力学函数包括:当前第一速度误差动力学函数、当前第二速度误差动力学函数、当前攻角误差动力学函数、当前第一俯仰角速度误差动力学函数及当前第二俯仰角速度误差动力学函数;
3.根据权利要求1所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述速度设定时间预设性能函数为:
4.根据权利要求2所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,基于所述速度设定时间预设性能函数、所述攻角设定时间预设性能函数及所述飞行器智能误差动力学模型,确定速度控制器及攻角转换误差动力学模型,具体包括:
5.根据权利要求4所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述速度预设性能条件为:
6.根据权利要求4所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述速度控制器为:
7.根据权利要求4所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述攻角转换误差动力学模型为:
8.根据权利要求1所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述自适应超螺旋滑模算法包括非奇异快速终端滑模面及改进的自适应超螺旋趋近律;
9.根据权利要求7所述的基于智能网络模型的飞行器预设性能滑模控制方法,其特征在于,所述攻角控制器为:
10.一种计算机装置,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-9中任一项所述基于智能网络模型的飞行器预设性能滑模控制方法的步骤。
技术总结
本发明公开一种基于智能网络模型的飞行器预设性能滑模控制方法及装置,涉及飞行器控制领域,方法包括:根据当前时刻飞行器的速度、攻角、升降舵偏转角及燃油当量比,基于智能网络模型确定当前误差动力学函数;根据当前误差动力学函数及飞行器传统误差动力学模型建立飞行器智能误差动力学模型;确定速度设定时间预设性能函数及攻角设定时间预设性能函数,进一步确定速度控制器及攻角转换误差动力学模型;基于攻角转换误差动力学模型,采用自适应超螺旋滑模算法,建立飞行器预设性能超螺旋滑模控制器,以确定攻角控制器;基于速度控制器及攻角控制器对飞行器进行控制。本发明提高了飞行器控制的鲁棒性和控制精度。
技术研发人员:丁一波,张天辰,岳晓奎,代洪华,李勇,张顺家,孙军,李勰,刘传凯
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!