一种复合式无人车-无人机空地协同系统及其工作方法
本发明涉及空地协同,特别是涉及一种多功能复合式无人车-无人机空地协同系统及其工作方法。
背景技术:
1、无人车具有体积小、成本低和无人员伤亡风险等优点,但其局限在于搜索范围小和通信距离近,无人机具有搜索范围大和通信距离远等优点,但其局限在于续航时间短,无人车和无人机构成空地异构多自主体协同系统,可大大提升完成复杂任务的能力,在远距离救援、搜救、监测等方面展现出惊人的前景,其中,无人机在无人车上的快速、自主、安全、可靠降落是决定无人车与无人机协同工作成败的关键和难点。
2、目前,已有研究将无人机与无人车相结合,构成空地协同系统,用来解决大范围连续飞行情况下,无人机因续航时间短导致任务距离有限的问题,但目前的结合方式中在无人机需要降落时,无人车是静止不动的,即无人机是降落到静态平台上,此时无人机可以根据静态平台的地理位置信息(可通过rtk(实时差分定位)得到静态平台准确的地理位置信息),提前进行离线路径规划,以降落到静态平台上,无需考虑静态平台的实时位姿信息,属于离线降落。事实上,为提高无人机和无人车空地协同系统作业的机动性和灵活性,无人车也是处在实时移动当中,无人机在移动的无人车上的降落属于动态在线降落,但目前缺少能够精确完成动态在线降落的技术。
技术实现思路
1、本发明的目的是提供一种复合式无人车-无人机空地协同系统及其工作方法,可以实现无人机精准可靠的降落在处于移动状态的无人车上,使得无人车与无人机能够更好的协同工作。
2、为实现上述目的,本发明提供了如下方案:
3、一种复合式无人车-无人机空地协同系统,包括:无人车和无人机,无人车和无人机通信连接;
4、无人车包括第一处理模块和无人机降落与充电平台;所述第一处理模块用于控制无人车移动;所述无人机降落与充电平台用于承载无人机,并对无人机进行充电;
5、无人机包括第二处理模块;当无人机需要降落时,所述第二处理模块用于基于无人车的实时位姿控制无人机飞行至无人车上方,获取对所述无人机降落与充电平台进行拍摄所得到的多张拍摄图像,基于多张拍摄图像确定无人机相对于无人车的相对位姿,根据所述相对位姿控制无人机降落在所述无人机降落与充电平台上。
6、在一些实施例中,无人车还包括激光雷达传感器、惯性导航系统和rtk定位系统,所述激光雷达传感器、所述惯性导航系统和所述rtk定位系统均与所述第一处理模块通信连接;所述第一处理模块用于基于所述激光雷达传感器获取的激光雷达数据、所述惯性导航系统获取的无人车位姿以及所述rtk定位系统获取的无人车位置控制无人车移动。
7、在一些实施例中,所述第一处理模块用于以所述激光雷达数据、所述无人车位姿和所述无人车位置作为输入,利用cartographer算法进行建图,得到地图数据;利用所述地图数据、无人车的起点和终点进行路径规划,得到规划路径;以所述激光雷达数据、所述无人车位姿和所述无人车位置作为输入,利用卡尔曼滤波算法估计无人车实时位姿;以所述地图数据、所述规划路径和所述无人车实时位姿作为输入,利用ros-navigation算法进行导航,控制无人车移动。
8、在一些实施例中,所述无人机降落与充电平台上布设有地标,所述地标包括多个vrip图像和位于每一所述vrip图像内部的aruco码;所述地标用于确定无人机相对于无人车的相对位姿。
9、一种上述的一种复合式无人车-无人机空地协同系统的工作方法,包括:
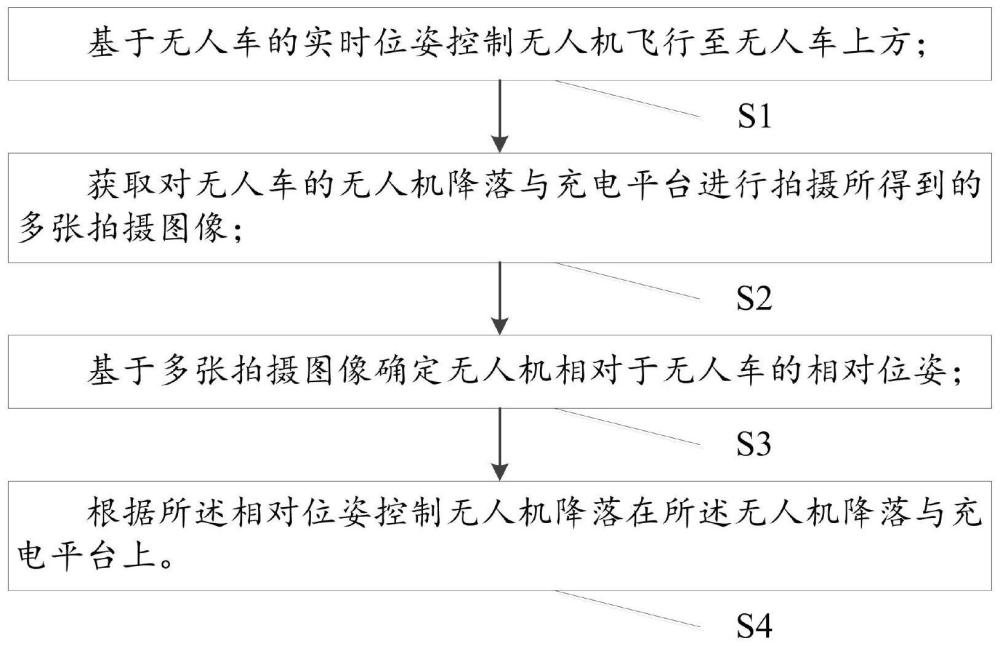
10、基于无人车的实时位姿控制无人机飞行至无人车上方;
11、获取对无人车的无人机降落与充电平台进行拍摄所得到的多张拍摄图像;
12、基于多张拍摄图像确定无人机相对于无人车的相对位姿;
13、根据所述相对位姿控制无人机降落在所述无人机降落与充电平台上。
14、在一些实施例中,基于无人车的实时位姿控制无人机飞行至无人车上方,具体包括:
15、获取无人机的实时位置;
16、判断所述实时位置与无人车的实时位姿中的位置的差值是否小于预设值,得到第一判断结果;
17、若所述第一判断结果为否,则控制无人机继续飞行,返回“获取无人机的实时位置”的步骤;
18、若所述第一判断结果为是,则确定已控制无人机飞行至无人车上方。
19、在一些实施例中,基于多张拍摄图像确定无人机相对于无人车的相对位姿,具体包括:
20、对多张拍摄图像进行阴影去除,得到无阴影图像;
21、以所述无阴影图像作为输入,利用关键滤波器感知方法确定无人机降落与充电平台上的地标图像;
22、基于所述地标图像确定无人机相对于无人车的相对位姿。
23、在一些实施例中,对多张拍摄图像进行阴影去除,得到无阴影图像,具体包括:
24、对于每一张拍摄图像,对所述拍摄图像进行曝光处理,得到曝光图像;
25、对所有所述曝光图像进行加权,得到融合权重图;
26、对所述融合权重图进行阴影边界去除,得到无阴影图像。
27、在一些实施例中,基于所述地标图像确定无人机相对于无人车的相对位姿,具体包括:
28、以所述地标图像作为输入,利用vrip算法对所述地标图像中的vrip图像进行处理,得到无人机相对于无人车的第一位姿;
29、以所述地标图像作为输入,对所述地标图像中的aruco码进行识别,得到无人机相对于无人车的第二位姿;
30、利用卡尔曼滤波算法对所述第一位姿和所述第二位姿进行融合,得到无人机相对于无人车的相对位姿。
31、在一些实施例中,根据所述相对位姿控制无人机降落在所述无人机降落与充电平台上,具体包括:
32、根据所述相对位姿和无人机的实时位姿,确定无人车的实时估计位姿;
33、以无人机的实时位姿和无人车的实时估计位姿作为输入,利用预定时间滑模观测器控制无人机降落在所述无人机降落与充电平台上。
34、根据本发明提供的具体实施例,本发明公开了以下技术效果:
35、本发明用于提供一种复合式无人车-无人机空地协同系统及其工作方法,包括:无人车和无人机,无人车包括第一处理模块和无人机降落与充电平台,第一处理模块用于控制无人车移动,无人机降落与充电平台用于承载无人机,并对无人机进行充电,无人机包括第二处理模块,当无人机需要降落时,第二处理模块用于基于无人车的实时位姿控制无人机飞行至无人车上方,获取对无人机降落与充电平台进行拍摄所得到的多张拍摄图像,基于多张拍摄图像确定无人机相对于无人车的相对位姿,根据相对位姿控制无人机降落在无人机降落与充电平台上,通过结合无人车的实时位姿和无人机相对于无人车的相对位姿来控制无人机降落,可以实现无人机精准可靠的降落在处于移动状态的无人车上,使得无人车与无人机能够更好的协同工作。
技术特征:
1.一种复合式无人车-无人机空地协同系统,其特征在于,包括:无人车和无人机,无人车和无人机通信连接;
2.根据权利要求1所述的一种复合式无人车-无人机空地协同系统,其特征在于,无人车还包括激光雷达传感器、惯性导航系统和rtk定位系统,所述激光雷达传感器、所述惯性导航系统和所述rtk定位系统均与所述第一处理模块通信连接;所述第一处理模块用于基于所述激光雷达传感器获取的激光雷达数据、所述惯性导航系统获取的无人车位姿以及所述rtk定位系统获取的无人车位置控制无人车移动。
3.根据权利要求2所述的一种复合式无人车-无人机空地协同系统,其特征在于,所述第一处理模块用于以所述激光雷达数据、所述无人车位姿和所述无人车位置作为输入,利用cartographer算法进行建图,得到地图数据;利用所述地图数据、无人车的起点和终点进行路径规划,得到规划路径;以所述激光雷达数据、所述无人车位姿和所述无人车位置作为输入,利用卡尔曼滤波算法估计无人车实时位姿;以所述地图数据、所述规划路径和所述无人车实时位姿作为输入,利用ros-navigation算法进行导航,控制无人车移动。
4.根据权利要求1所述的一种复合式无人车-无人机空地协同系统,其特征在于,所述无人机降落与充电平台上布设有地标,所述地标包括多个vrip图像和位于每一所述vrip图像内部的aruco码;所述地标用于确定无人机相对于无人车的相对位姿。
5.一种权利要求1-4任一项所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,包括:
6.根据权利要求5所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,基于无人车的实时位姿控制无人机飞行至无人车上方,具体包括:
7.根据权利要求5所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,基于多张拍摄图像确定无人机相对于无人车的相对位姿,具体包括:
8.根据权利要求7所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,对多张拍摄图像进行阴影去除,得到无阴影图像,具体包括:
9.根据权利要求7所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,基于所述地标图像确定无人机相对于无人车的相对位姿,具体包括:
10.根据权利要求5所述的一种复合式无人车-无人机空地协同系统的工作方法,其特征在于,根据所述相对位姿控制无人机降落在所述无人机降落与充电平台上,具体包括:
技术总结
本发明公开一种复合式无人车‑无人机空地协同系统及其工作方法,涉及空地协同技术领域,包括:无人车和无人机,无人机包括第二处理模块,当无人机需要降落时,第二处理模块用于基于无人车的实时位姿控制无人机飞行至无人车上方,获取对无人车的无人机降落与充电平台进行拍摄所得到的多张拍摄图像,基于多张拍摄图像确定无人机相对于无人车的相对位姿,根据相对位姿控制无人机降落在无人机降落与充电平台上,通过结合无人车的实时位姿和无人机相对于无人车的相对位姿来控制无人机降落,可以实现无人机精准可靠的降落在处于移动状态的无人车上,使得无人车与无人机能够更好的协同工作。
技术研发人员:林立雄,杨通海,施亦凡,许志平,何荧
受保护的技术使用者:集美大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!