一种障碍物轨迹预测方法、系统和存储介质与流程
本说明书涉及轨迹预测领域,特别涉及一种障碍物轨迹预测方法、系统和存储介质。
背景技术:
1、随着自动驾驶技术的快速发展,轨迹预测在自动驾驶系统中扮演着重要角色。自动驾驶车辆通过预测道路上障碍物车辆的运动轨迹,从而为自动驾驶车辆的路径行驶和行为决策提供参考。由于障碍物车辆的行为和运动模式十分复杂,车辆轨迹将呈现多模态属性,即在相同历史轨迹条件下,车辆的未来轨迹具有多种可能性。例如,车辆在路口的轨迹预测结果可以是障碍物可能会有50%的概率直行、30%概率左转和20%概率右转。这也称为车辆轨迹的多模态轨迹预测结果。
2、现有针对多模态轨迹预测结果的后处理方法,一般是直接选择多模态轨迹预测结果中概率最大的预测轨迹作为障碍物车辆的轨迹预测结果。然而,这种后处理方法可能导致在连续的预测场景中出现障碍物车辆在不同的驾驶行为之间频繁切换,进而影响自动驾驶车辆的行为决策规划。
3、进一步的,由于障碍物车辆的检测、追踪结果具有一定的波动性,而且轨迹预测算法会有一定的失误率,这将导致车辆轨迹的多模态轨迹预测结果不稳定,轨迹点可能不符合运动学,降低自动驾驶系统的运行效率,甚至带来安全性问题。
4、因此,希望可以提供一种障碍物轨迹预测方法、系统和存储介质,能够提高轨迹预测的稳定性和准确性,有利于保证预测轨迹平滑且符合运动学。
技术实现思路
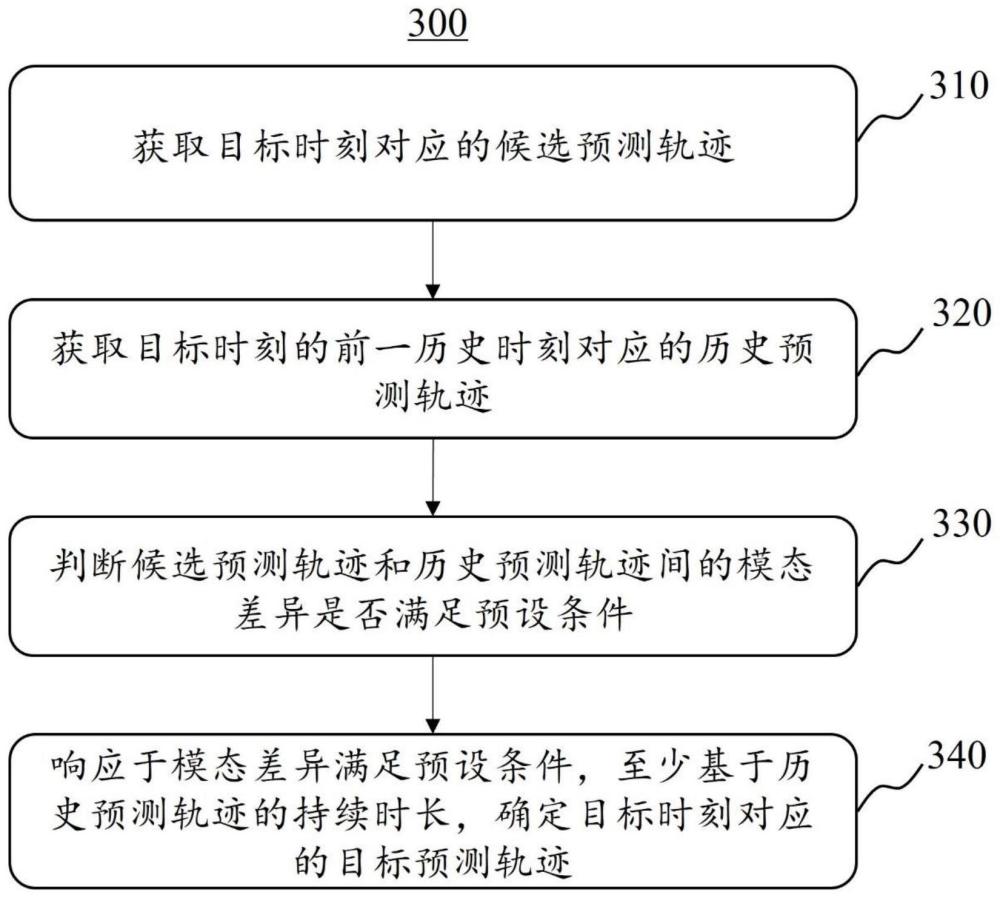
1、本说明书一个或多个实施例提供一种障碍物轨迹预测方法,所述方法包括:获取目标时刻对应的候选预测轨迹;获取所述目标时刻的前一历史时刻对应的历史预测轨迹;判断所述候选预测轨迹和所述历史预测轨迹间的模态差异是否满足预设条件;响应于所述模态差异满足所述预设条件,至少基于所述历史预测轨迹的持续时长,确定所述目标时刻对应的目标预测轨迹。
2、本说明书实施例之一提供一种障碍物轨迹预测系统,所述系统包括:获取模块,被配置为获取目标时刻对应的候选预测轨迹;以及获取所述目标时刻的前一历史时刻对应的历史预测轨迹;判断模块,被配置为判断所述候选预测轨迹和所述历史预测轨迹间的模态差异是否满足预设条件;确定模块,被配置为响应于所述模态差异满足所述预设条件,至少基于所述历史预测轨迹的持续时长,确定所述目标时刻对应的目标预测轨迹。
3、本说明书一个或多个实施例提供一种计算机可读存储介质,所述存储介质存储计算机指令,当计算机读取存储介质中的计算机指令后,计算机执行轨迹确定方法。
4、本说明书实施例至少包括如下有益效果:(1)通过慢切换策略选择模态可以有效抑制短时间内的模态切换造成的轨迹摆动,使不同模态之间转换不会过于突然,减少了障碍车辆行驶过程中预测轨迹的异常波动,有利于使不同轨迹模态之间的转换更平稳;(2)轨迹预测算法存在一定失误率可能出现历史预测轨迹为错误模态,而当前预测轨迹是正确模态的情况。通过在慢切换策略中引入快恢复策略,可以有效避免慢切换策略中将模态切换的间隔约束在较长时间外,有助于尽快将模态轨迹从错误模态向正确模态切换,进而提升预测准确率。
技术特征:
1.一种障碍物轨迹预测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述第一误差估计值、所述第二误差估计值和所述历史预测轨迹的持续时长,确定所述目标时刻对应的目标预测轨迹,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述第一误差估计值和所述第二误差值,判断所述历史预测轨迹的所述持续时长是否满足预设时长条件,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于判断结果,确定所述目标时刻对应的所述目标预测轨迹,包括:
5.根据权利要求3所述的方法,其特征在于,所述基于判断结果,确定所述目标时刻对应的所述目标预测轨迹,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于判断结果,确定所述目标时刻对应的所述目标预测轨迹,还包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种障碍物轨迹预测系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储计算机指令,当计算机读取存储介质中的计算机指令后,计算机执行如权利要求1~8中任一项所述的障碍物轨迹预测方法。
技术总结
本说明书实施例提供一种障碍物轨迹预测方法、系统和存储介质,该方法包括获取目标时刻对应的候选预测轨迹;获取目标时刻的前一历史时刻对应的历史预测轨迹;判断候选预测轨迹和历史预测轨迹间的模态差异是否满足预设条件;响应于模态差异满足所述预设条件,至少基于历史预测轨迹的持续时长,确定目标时刻对应的目标预测轨迹。本说明书实施例通过慢切换策略选择模态可以有效抑制短时间内的模态切换造成的轨迹摆动,使不同轨迹模态之间的转换更平稳;通过在慢切换策略中引入快恢复策略,有效避免慢切换策略中将模态切换的间隔约束在较长时间外,有助于尽快将模态轨迹从错误模态向正确模态切换,进而提升预测准确率。
技术研发人员:王文通,朱晓龙,刘羿,何贝
受保护的技术使用者:北京斯年智驾科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!