一种建筑物震害信息检测提取方法与流程
1.本发明涉及一种建筑物震害信息检测提取方法,属于地震灾害评估技术领域。
背景技术:
2.地震灾害会对人们的生命财产造成严重影响,其中建筑物的损坏是造成人员 伤亡的主要原因之一。地震发生后快速评估损失对于应急响应处置、救援行动和 灾后重建至关重要。破坏性地震发生后,建筑物结构类型的抗震设防等级在人员 伤亡中起着至关重要的作用。震后不同结构类型建筑物震害信息的提取分析研究, 能够为震后的应急救援、建筑物的损坏程度评估、其他建构筑物(桥梁、隧道、 大坝等)的变形特征提取及建筑物抗震加固等方面提供科学依据和技术支撑。
3.震后建筑物损失评估判定的方法是由地震应急抗震救灾指挥部派出的相关专家组成震后现场科考小组,通过测量和目视解读(解译)判定的方法对震后建筑物破坏情况进行评估分析。震后建筑物的损失评估工作,时间紧任务重,现场工作人员在调查的过程中用尺子量测建筑物裂缝信息,存在人为误差。建筑物墙体发生轻微倾斜变形的,在工作人员现场调查中存在不易被识别的缺点,疏漏建筑物变形信息。破坏程度较高的建筑物存在二次倒塌的风险,为现场科考工作人员的人身安全带来较大的危险。
技术实现要素:
4.本发明所要解决的技术问题是提供一种利用地面三维激光扫描数据,基于对点云中每个点的局部表面曲率值的分析,进行点云震害信息识别,针对初步提取结果,结合密度聚类算法来定义提取信息程度的建筑物震害信息检测提取方法。
5.本发明采用如下技术方案:
6.本发明建筑物震害信息检测提取方法,其采用如下步骤:
7.s1,点云数据预处理
8.采用三维激光扫描仪采集建筑物表面的点云数据,所述点云数据包括:x/y/z 空间位置信息、反射强度、rgb信息以及x/y/z的法线信息数据;
9.利用三维激光扫描仪软件realworks的功能进行点云数据去噪、滤波处理和坐标转换;取坐标转换后的建筑物每个墙面的原始数据,并将其保存为独立的一个点云数据文件,定义墙面点云数据的左下角为原点坐标x/y/z的起点(0.0.0),对处理后的数据按照单位为米的规范进行转存,xyz为点云数据的三维坐标,其中x为横坐标,y为纵坐标,z为垂直于xy平面的坐标;
10.s2,将坐标转换后的建筑物每个墙面的原始数据进行主成分分析,计算墙面点云数据的曲率值;统计分析震后建筑物墙体裂缝特征值的分布特点,并设定曲率阈值,提取曲率正态分布期望值大于阈值的点;
11.通过主成分分析降低具有大量相互关联变量数据的维度;缩减包括将原始数据转换为一组新的不相关的变量,这些变量的数量等于所分析数据的维数,在离散点云数据集p
中选中任意一点a,其在离散点云数据集p中的位置为i,那么点a曲率k
i
的表达式为:
[0012][0013]
其中x、y为点a的横、纵坐标值,x、y的单位为:米;
[0014]
s3,计算墙面点云数据的临近点夹角值,统计分析震后建筑物墙体裂缝临近点云夹角特征值的分布特点,并设定夹角阈值,提取临近点夹角值大于阈值的点;
[0015]
对离散点云数据集p中任意一点,搜索其半径r邻域内的所有临近点,r的单位为:米,设临近点数目为g,点p
i
的g临近点对应法线分别为 {n
i1
,n
i2
,n
i3
,
……
n
ig
},点pi与r邻域内临近点法线夹角值α的计算公式为:
[0016][0017]
s4,对点云数据的法向量进行统计分析,得到建筑物破坏区域所对应的判别阈值,通过设定与阈值的关系,剔除临近平面的点,将计算结果与步骤s2和步骤s3的结果取交集,得到墙体裂缝和墙皮脱落区域的初步提取结果,所述交集为具有相同坐标位置的点;
[0018]
s5,采用密度聚类算法对s4计算的初步提取结果进行去噪处理,降低墙面抹灰不均匀和边界效应对震害特征的影响,得到建筑物墙体裂缝点云的分布区域。
[0019]
本发明步骤s5中,在密度聚类算法中将数据点分为三类:
[0020]
(1)核心点,若样本p
i
的半径r邻域内至少包含了指定数目minpts个样本,即n
r
(p
i
)≥minpts,则称样本点p
i
为核心点;
[0021]
(2)边界点,若样本p
i
的r邻域内包含的样本数目小于minpts,但是它在其他核心点的邻域内,则称样本点p
i
为边界点;
[0022]
(3)噪点,既不是核心点也不是边界点的点。
[0023]
本发明积极效果如下:
[0024]
(1)本发明通过主成分分析计算点云数据的曲率值和临近点夹角值,发挥了三维激光扫描仪(地基lidar)数据高精度的优势;
[0025]
(2)自动化程度高,运算速度快,适合数万点云数据的加载计算。
[0026]
(3)具有一定的灵活性,通过调整曲率和夹角的阈值,可以降低人为干扰因素。
[0027]
(4)解决了建筑物震害信息三维激光扫描仪(地基lidar)数据的自动检测提取。
[0028]
采用本发明方法可减少不必要的劳动,降低现场调查人员二次伤害的风险,消除人为主观干扰因素,快速、准确地评价建筑物的健康状况。
[0029]
本发明通过三维激光扫描仪扫描震后建筑物获取三维点云数据,快速提取建筑物震害信息,能够为震后的应急救援和损失评估提供技术支撑和科学保障。
附图说明
[0030]
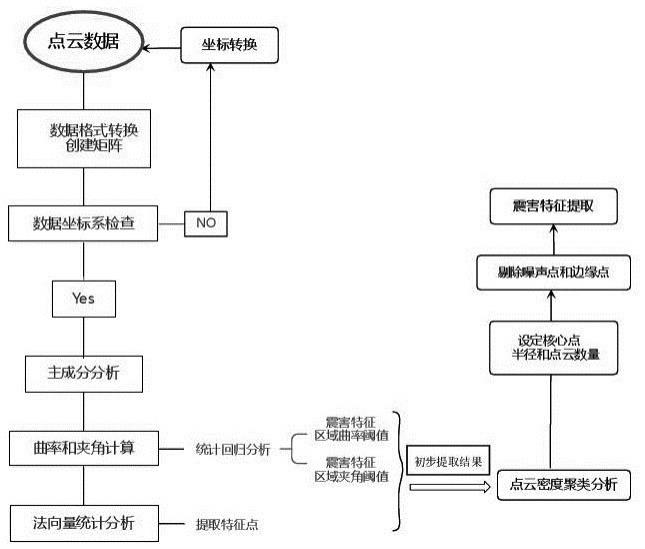
图1为本发明数据处理流程图;
[0031]
图2为砖木结构建筑现场图;
[0032]
图3为砖木结构建筑原始点云数据;
[0033]
图4为砖木结构建筑初步提取结果图;
[0034]
图5为砖结构建筑现场图;
[0035]
图6为砖结构建筑原始点云数据图;
[0036]
图7为砖结构建筑初步提取结果图;
[0037]
图8为砖混结构建筑现场图;
[0038]
图9为砖混结构建筑原始点云数据图;
[0039]
图10为砖混结构建筑初步提取结果图;
[0040]
图11为框架结构建筑现场照片图;
[0041]
图12为框架结构原始点云数据图;
[0042]
图13为墙面脱落区域的信息初步提取结果图;
[0043]
图14为砖木结构建筑墙体右下角倾斜变形提取结果图;
[0044]
图15为砖结构建筑墙面震害信息提取结果图;
[0045]
图16为砖混结构建筑墙面震害信息提取结果图;
[0046]
图17为框架结构建筑震害信息提取结果图;
[0047]
图18调查点及实例样点分布图。
具体实施方式
[0048]
如附图1所示,本发明建筑物震害信息检测提取方法采用如下步骤实现:
[0049]
s1,点云数据预处理
[0050]
三维激光扫描仪采集建筑物表面的原始数据主要包括:x/y/z空间位置信息 (1
‑
3列)、反射强度(4列)、rgb信息(5
‑
7列)以及x/y/z的法线信息(8
‑
10 列),如下表1所示:
[0051][0052]
表1:建筑物墙面原始三维激光扫描仪(地基lidar)数据
[0053]
利用三维激光扫描仪软件realworks的功能进行点云数据去噪、滤波处理和坐标转换;取坐标转换后的建筑物每个墙面的原始数据,并将其保存为独立的一个点云数据文件,定义墙面点云数据的左下角为原点坐标x/y/z的起点(0.0.0),对处理后的数据按照单位为米的规范进行转存,xyz为点云数据的三维坐标,其中x为横坐标,y为纵坐标,z为垂直于xy平面的坐标,如下表2所示:
[0054][0055]
表2 坐标转换后的数据
[0056]
s2,将坐标转换后的建筑物每个墙面的原始数据进行主成分分析,计算墙面点云数据的曲率值;统计分析震后建筑物墙体裂缝特征值的分布特点,并设定曲率阈值,提取曲率正态分布期望值大于阈值的点;
[0057]
主成分分析(pca)是在保留数据变异性的前提下,降低具有大量相互关联变量数据的维度;缩减包括将原始数据转换为一组新的不相关的变量,这些变量的数量等于所分析数据的维数;主成分分析可以从海量数据集中提取特征,目前已成功应用于点云处理(法向量、局部曲率和夹角计算),用于分割和检测tls 数据中的特征或对象;在离散点云数据集p中选中任意一点a,其在离散点云数据集p中的位置为i,那么点a曲率k
i
的表达式为:
[0058][0059]
其中x、y为点a的横、纵坐标值,x、y的单位为:米;
[0060]
s3,计算墙面点云数据的临近点夹角值,统计分析震后建筑物墙体裂缝临近点云夹角特征值的分布特点,并设定夹角阈值,提取临近点夹角值大于阈值的点;
[0061]
对离散点云数据集p中任意一点,搜索其半径r邻域内的所有临近点,r的单位为:米,设临近点数目为g,点p
i
的g临近点对应法线分别为 {n
i1
,n
i2
,n
i3
,
……
n
ig
},点pi与r邻域内临近点法线夹角值α的计算公式为:
[0062][0063]
s4,对点云数据的法向量进行统计分析,得到建筑物破坏区域所对应的判别阈值,通过设定与阈值的关系,剔除临近平面的点,将计算结果与步骤s2和步骤s3的结果取交集,交集为具有相同坐标位置的点;得到墙体裂缝和墙皮脱落区域的初步提取结果;
[0064]
地震现场的建筑物结构类型主要分为砖结构、砖木结构、砖混结构和框架结构;在曲率估计和临近点夹角计算过程中,需充分考虑建筑物单体墙面的曲率分布形态,排除建筑物墙面平整度不均匀性等人为干扰因素。
[0065]
对震区建筑物单体墙面曲率统计分析,本发明中将曲率阈值设定为0.0015,当墙面曲率正态分布期望值小于0.0015时,建筑物墙面平整度较高,对临近点夹角的阈值设定
为大于1.5度,该方法适用于墙体表面平整度较高,墙体裂缝位移错动量较小的建筑;当墙面曲率正态分布期望值大于0.0015时,建筑物墙面平整度较低,对临近点夹角的阈值设定为大于6度,该方法适用于墙体表面平整度较差,墙体裂缝位移错动量较大的建筑如下表3所示:
[0066][0067]
表3 阈值设定对照表
[0068]
通过上述方法对四种不同建筑结构类型墙体裂缝的提取如图2
‑
13所示:
[0069]
图2为砖木结构建筑现场照片,该建筑位于此次地震的
ⅶ
度区(图18),属于当地居民自建房屋,其建筑特点:墙面存在抹灰不平整的人为因素,砖墙砌体,没有抗震构造措施,屋顶为木梁和瓦片,墙面曲率正态分布期望值为0.0462;图3为砖木结构建筑原始点云数据;图4为砖木结构建筑提取结果,墙面抹灰不平整掩盖了墙面右下角细微裂缝的变形信息,在曲率计算的初步识别中不能够提取到裂缝的相关信息。
[0070]
图5为砖结构建筑现场照片,该建筑位于此次地震的
ⅸ
度区(图18),属于当地居民自建二层房屋,其建筑特点:建筑成本低廉,不具备抗震构造措施,承重墙为砖砌体,没有钢筋水泥混凝土柱和梁,屋顶为预制板,墙面曲率正态分布期望值为0.0012;图6为砖结构建筑原始点云数据;图7为砖结构建筑提取结果,墙体裂缝的提取信息在分布形态、长度和宽度等方面与实际值吻合,由于受自建房屋墙面抹灰不均匀及边界效应的影响,在初步提取结果中存在一些噪点,但不影响墙体震害信息的提取。
[0071]
图8为砖混结构建筑现场照片,该建筑位于此次地震的ix度区(图18),属于当地居民的自建三层房屋,具备抗震设防措施,其建筑特点为:砖混砌体结构,在墙角有构造柱与墙面共同承重,一楼、二楼屋顶为钢筋水泥浇筑,同时配有承重梁,开间较大;其震害特征较为明显,墙面发生倾斜变形和x裂缝,属于严重破坏;墙面曲率正态分布期望值为0.0213;图9为砖混结构建筑原始点云数据;图10为砖混结构建筑初步提取结果,墙面左侧和顶部的裂缝能够完全提取,在该墙体右侧受瓷砖装饰面不平的影响,产生了一些噪点,掩盖了墙体右下角连接墙皮脱落区域的细微裂缝信息。
[0072]
图11为框架结构建筑现场照片,该建筑位于此次地震的
ⅷ
度区(图18),属于钢筋混凝土框架结构,具备抗震构造措施;受地震的影响,该建筑存在墙皮脱落的现象,墙面曲率正态分布期望值为0.0017;图12为框架结构原始点云数据;图13为墙面脱落区域的信息提取,其宽度为8m,高度为12m,由于受混凝土抹灰不均匀、墙面悬挂条幅及边界效应的影响,存在一定的噪声点,但不影响墙体脱落范围信息的提取。
[0073]
s5,采用密度聚类算法对s4计算的初步提取结果进行去噪处理,降低墙面抹灰不均匀和边界效应对震害特征的影响,得到建筑物墙体裂缝点云的分布区域。在密度聚类算法中将数据点分为三类:
[0074]
(1)核心点,若样本p
i
的半径r邻域内至少包含了指定数目(该指定数目为人工输
入参数,即设定聚类点的个数,若想提取半径r邻域内≥n的点云,则该数目为n。)minpts个样本,即n
r
(p
i
)≥minpts,则称样本点p
i
为核心点;
[0075]
(2)边界点,若样本p
i
的r邻域内包含的样本数目小于minpts,但是它在其他核心点的邻域内,则称样本点p
i
为边界点;
[0076]
(3)噪点,既不是核心点也不是边界点的点;
[0077]
对计算过程中出现的边界效应、人为因素造成的墙面点云噪点进行二次过滤去噪;如图14
‑
17所示,在图中:*为噪点,o为边界点,
·
为核心点;
[0078]
图14为砖木结构建筑提取结果,由于细微裂缝的宽度小于lidar点云数据的点间距,因此在震害信息提取过程中,只检测到了墙体右下角的倾斜变形,未提取到相关的裂缝信息;该墙面的震害信息提取度为80%。图15为砖结构建筑提取结果,墙体裂缝的分布形态、纹理形状等信息与实际情况吻合度较高,该墙面的震害信息提取度约为98%。图16为砖混结构建筑提取结果,墙体裂缝、墙皮脱落及不平整墙面的相关信息均被提取,该墙面的震害信息提取度约为95%。图17为框架结构建筑提取结果,墙皮脱落区域的边界提取度较高,该墙面的震害信息提取度约为95%。
[0079]
实施例:
[0080]
如图18所示2013年8月震区调查,使用trimble gx200三维激光扫描仪(技术指标见表4)在
ⅶ
、
ⅷ
、
ⅸ
度区进行震后建筑物点云数据采集(如图1),共涉及四类建筑结构类型房屋,为砖木结构、砖结构、砖混结构、框架结构。在数据采集过程中,为提高工作效率,每个建筑物采用夹角式扫描,即同时采集建筑物的正面和侧面;为降低坐标误差,采用相对坐标的形式,即三维激光扫描仪所在点为控制点坐标。
[0081][0082]
表4:trimble gx200技术指标
[0083]
本发明利用地面三维激光扫描数据,检测和测量建筑物的损伤,基于对点云中每个点的局部表面曲率值的分析,该值由主成分分析确定,然后利用临近点夹角算法,结合实际测量值的数据特征进行点云震害信息识别,基于每个点的法向量分析,对原始点云数据去噪处理,针对初步提取结果,结合密度聚类算法来定义提取信息的程度。
[0084]
(1)本发明通过主成分分析计算点云数据的曲率值和临近点夹角值,发挥了三维激光扫描仪数据高精度的优势;
[0085]
(2)自动化程度高,运算速度快,适合数万点云数据的加载计算。
[0086]
(3)具有一定的灵活性,通过调整曲率和夹角的阈值,可以降低人为干扰因素。
[0087]
(4)解决了建筑物震害信息三维激光扫描仪(lidar)数据的自动检测提取。
[0088]
采用本发明方法可减少不必要的劳动,降低现场调查人员二次伤害的风险,消除人为主观干扰因素,快速、准确地评价建筑物的健康状况。
[0089]
最后说明的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1