一种集成电路的智能检修方法和装置与流程
[0001]
本发明涉及集成电路检修相关领域,尤其涉及一种集成电路的智能检修方法和装置。
背景技术:
[0002]
集成电路或称微电路(microcircuit)、微芯片(microchip)、芯片(chip)在电子学中是一种把电路(主要包括半导体装置,也包括被动元件等)小型化的方式,并通常制造在半导体晶圆表面上。集成电路在各行各业中发挥着非常重要的作用,是现代信息社会的基石。
[0003]
但本申请发明人在实现本申请实施例中发明技术方案的过程中,发现上述技术至少存在如下技术问题:现有技术中存在集成电路的微型化影响检修准确性和检修效率的技术问题。
技术实现要素:
[0004]
本申请实施例通过提供一种集成电路的智能检修方法和装置,解决了现有技术中存在集成电路的微型化影响检修准确性和检修效率的技术问题,达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0005]
鉴于上述问题,提出了本申请实施例提供一种集成电路的智能检修方法和装置。
[0006]
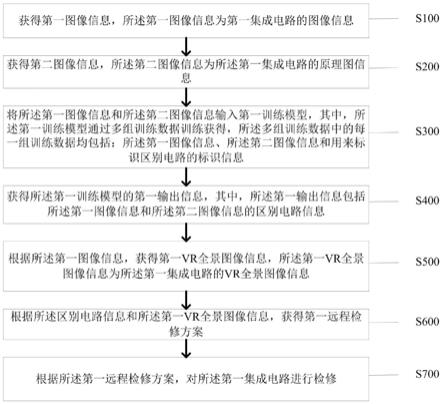
第一方面,本申请实施例提供了一种集成电路的智能检修方法,所述方法包括:获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;获得第二图像信息,所述第二图像信息为所述第一集成电路的原理图信息;将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第二图像信息的区别电路信息;根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0007]
另一方面,本申请还提供了一种集成电路的智能检修装置,所述装置包括:第一获得单元,所述第一获得单元用于获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;第二获得单元,所述第二获得单元用于获得第二图像信息,所述第二图像信息为所述第一集成电路的原理图信息;第一输入单元,所述第一输入单元用于将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;第三获得单元,所述第三获得单元用于获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第
二图像信息的区别电路信息;第四获得单元,所述第四获得单元用于根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;第五获得单元,所述第五获得单元用于根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;第一检修单元,所述第一检修得单元用于根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0008]
第三方面,本发明提供了一种集成电路的智能检修装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现第一方面所述方法的步骤。
[0009]
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:由于采用了获得集成电路的图像信息及集成电路的原理图信息,并将所述图像信息输入第一训练模型的方式,基于训练模型不断的自我修正调整的特性,通过所述训练模型输出区别电路信息,将所述区别电路信息和vr全景图信息获得第一远程检修方案,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0010]
上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
附图说明
[0011]
图1为本申请实施例一种集成电路的智能检修方法的流程示意图;图2为本申请实施例一种集成电路的智能检修装置的结构示意图;图3为本申请实施例示例性电子设备的结构示意图。
[0012]
附图标记说明:第一获得单元11,第二获得单元12,第一输入单元13,第三获得单元14,第四获得单元15,第五获得单元16,第一检修单元17,总线300,接收器301,处理器302,发送器303,存储器304,总线接口306。
具体实施方式
[0013]
本申请实施例通过提供一种集成电路的智能检修方法和装置,解决了现有技术中存在集成电路的微型化影响检修准确性和检修效率的技术问题,达到对对集成电路进行准确检修,提高检修效率的技术效果。下面,将参考附图详细的描述根据本申请的示例实施例。显然,所描述的实施例仅是本申请的一部分实施例,而不是本申请的全部实施例,应理解,本申请不受这里描述的示例实施例的限制。
[0014]
申请概述集成电路或称微电路(microcircuit)、微芯片(microchip)、芯片(chip)在电子学中是一种把电路(主要包括半导体装置,也包括被动元件等)小型化的方式,并通常制造在半导体晶圆表面上。集成电路在各行各业中发挥着非常重要的作用,是现代信息社会的基石。但现有技术中存在集成电路的微型化影响检修准确性和检修效率的技术问题。
[0015]
针对上述技术问题,本申请提供的技术方案总体思路如下:本申请实施例提供了一种集成电路的智能检修方法,所述方法包括:获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;获得第二图像信息,所述第二图像信息
为所述第一集成电路的原理图信息;将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第二图像信息的区别电路信息;根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0016]
在介绍了本申请基本原理后,下面将结合说明书附图来具体介绍本申请的各种非限制性的实施方式。
[0017]
实施例一如图1所示,本申请实施例提供了一种集成电路的智能检修方法,其中,所述方法包括:步骤s100:获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;具体而言,所述第一图像信息为根据所述第一集成电路获得的图像信息,所述第一图像信息为清晰展现第一集成电路的结构的图像信息。
[0018]
步骤s200:获得第二图像信息,所述第二图像信息为所述第一集成电路的原理图信息;具体而言,所述原理图为电路板上各器件之间连接原理的图表,它反映了各个器件之间的连接关系及连接原理,获得所述第一集成电路的原理图信息。
[0019]
步骤s300:将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;步骤s400:获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第二图像信息的区别电路信息;具体而言,所述第一训练模型为神经网络模型,所述神经网络模型即机器学习中的神经网络模型,神经网络(neural networks,nn)是由大量的、简单的处理单元(称为神经元)广泛地互相连接而形成的复杂神经网络系统,它反映了人脑功能的许多基本特征,是一个高度复杂的非线性动力学习系统。神经网络模型是以神经元的数学模型为基础来描述的。人工神经网络(artificial neural networks),是对人类大脑系统的一阶特性的一种描述。简单地讲,它是一个数学模型。通过大量训练数据的训练,将所述第一图像信息和所述第二图像信息输入神经网络模型,则输出所述第一图像信息和所述第二图像信息的区别电路信息。
[0020]
更进一步而言,所述训练的过程实质为监督学习的过程,每一组监督数据均包括所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息,将所述第一图像信息、所述第二图像信息输入到神经网络模型中,根据用来标识区别电路的标识信息,对所述神经网络模型进行不断的修正、调整,直至获得输出信息与用来标识区别电路的标识信息一致时,则结束本组数据监督学习,进行下一组数据监督学习;当所述神经网络模型的输出信息达到预定的准确率/达到收敛状态时,则监督学习过程结束。通过对所述神经网络模型的监督学习,进而使得所述神经网络模型处理所述输入数据更加准确,进而使得输出的
所述第一图像信息和所述第二图像信息的区别电路信息更加准确,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0021]
步骤s500:根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;具体而言,所述vr全景是基于全景图像的真实场景虚拟现实技术,是虚拟现实技术中非常核心的部分。全景是把相机环360
°
拍摄的一组或多组照片拼接成一个全景图像,通过计算机技术实现全方位互动式观看的真实场景还原展示方式。获得第一集成电路的vr全景图像信息,为后续准确判断故障夯实了基础。
[0022]
步骤s600:根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;步骤s700:根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0023]
具体而言,通过所述训练模型输出的区别电路信息和第一vr全景图像信息的比对和分析判断,根据所述区别电路的不同的类别匹配至相适应的远程工程师,通过所述远程工程师对所述电路进行检修,获得第一远程检修方案,根据所述第一远程检修方案,对所述第一集成电路进行检修处理。
[0024]
进一步而言,所述根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案,本申请实施例步骤s600还包括:步骤s610:获得第一远程工程师数据库;步骤s620:根据所述区别电路信息,获得所述区别电路信息的类别信息;步骤s630:根据所述区别电路信息的类别信息,从所述第一远程工程师数据库中获得第一工程师信息;步骤s640:根据所述第一工程师信息,获得所述第一远程检修方案。
[0025]
具体而言,所述第一远程工程师数据库为存储相应的远程工程师的相关信息的数据库,它包括工程师们的类别信息,技能情况,时间安排等,根据所述区别电路的类别,从所述第一远程工程师数据库获得第一工程师信息,将所述区别电路信息及第一vr全景图像信息发送至所述第一工程师,获得第一远程检修方案。通过根据电路的类别及工程师的技能属性相互匹配的方式,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0026]
进一步而言,所述将所述第一图像信息和所述第二图像信息输入第一训练模型之前,本申请实施例步骤s300还包括:步骤s310:获得输入所述第一训练模型的第一训练数据、第二训练数据直至第n训练数据,其中,n为大于1的自然数;步骤s320:根据所述第一训练数据生成第一标识码,所述第一标识码与所述第一训练数据一一对应;步骤s330:根据所述第二训练数据和第一标识码生成第二标识码,以此类推,根据所述第n训练数据和第n-1标识码生成第n标识码;步骤s340:将所有训练数据和标识码复制存储在m台电子设备上,其中,m为大于1的自然数。
[0027]
具体而言,区块链技术也被称之为分布式账本技术,是一种由若干台计算设备共同参与“记账",共同维护一份完整的分布式数据库的新兴技术。由于区块链技术具有去中
心化、公开透明、每台计算设备可以参与数据库记录、并且各计算设备之间可以快速的进行数据同步的特性,使得区块链技术已在众多的领域中广泛的进行应用。根据所述第一训练数据生成第一标识码,所述第一标识码与第一训练数据一一对应;根据所述第二训练数据和第一标识码生成第二标识码,第二标识码与第二训练数据一一对应;以此类推,根据所述第n训练数据和第n-1标识码生成第n标识码,其中,n为大于1的自然数,所述训练数据中的每组均包括所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息。将所有训练数据和标识码分别复制保存在m台设备上,其中,所述第一训练数据和所述第一标识码作为第一存储单位保存在一台设备上,所述第二训练数据和所述第二标识码作为第二存储单位保存在一台设备上,所述第n训练数据和所述第n标识码作为第n存储单位保存在一台设备上,当需要调用所述训练数据时,每后一个节点接收前一节点存储的数据后,通过“共识机制”进行校验后保存,通过哈希函数对于每一存储单位进行串接,使得训练数据不易丢失和遭到破坏,通过区块链的逻辑对所述训练数据进行加密处理,保证了所述训练数据的安全性,并存储于多台设备上,所述存储于多台设备上的数据通过共识机制进行处理,进一步的保证了训练数据的安全性,进而保证通过所述训练数据训练获得的第一训练模型的准确性,进而使得输出的所述第一图像信息和所述第二图像信息的区别电路信息更加准确合理,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0028]
进一步而言,本申请实施例还包括:步骤s810:获得第一故障现象信息;步骤s820:根据所述第一故障现象信息,判断所述第一远程检修方案与所述第一故障现象信息是否匹配;步骤s830:如果所述第一远程检修方案与所述第一故障现象信息相匹配,根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0029]
具体而言,所述第一故障现象为所述第一集成电路表现的故障的情况,根据所述第一故障现象对所述第一远程检修方案提出的故障现象是否匹配,当所述第一远程检修方案说明的故障现象与所述第一故障现象不一致时,表明所述第一远程检修方案可能还存在其他问题,此时不能直接根据所述第一远程检修方案进行检修,如果所述第一远程检修方案与所述第一故障现象信息相匹配,根据所述第一远程检修方案,对所述第一集成电路进行检修。通过第一故障现象对所述第一远程检修方案进行故障判断,进而保证所述第一远程检修方案适配所述第一集成电路。
[0030]
进一步而言,本申请实施例还包括:步骤s910:根据所述第一图像信息,获得所述第一集成电路的规模等级信息;步骤s920:获得预定规模等级阈值;步骤s930:判断所述第一集成电路的规模等级信息是否在所述预定规模等级阈值之内;步骤s940:如果所述第一集成电路的规模等级信息不在所述预定规模等级阈值之内,获得第一分区信息;步骤s950:根据所述第一分区信息,对所述第一图像信息进行分区;步骤s960:获得第一分区图像信息、第二分区图像信息,直到第n分区图像信息。
[0031]
具体而言,所述预定规模等级阈值为根据所述集成电路的复杂程度获得的阈值,
当所述集成电路的复杂程度超过所述预定规模等级阈值时,对所述集成电路进行分区处理,将所述第一集成电路分为第一分区图像信息、第二分区图像信息、第三分区图像信息直至第n分区图像信息,其中,n为大于1的自然数。
[0032]
进一步而言,本申请实施例步骤s960还包括:步骤s961:根据所述第一分区图像信息,获得所述第一分区图像信息的类别信息;步骤s962:根据所述第一分区图像信息的类别信息,获得第二工程师信息;步骤s963:根据所述第二分区图像信息,获得所述第二分区图像信息的类别信息;步骤s964:根据所述第二分区图像信息的类别信息,获得第三工程师信息;步骤s965:以此类推,根据所述第n分区图像信息,获得所述第n分区图像信息的类别信息;步骤s966:根据所述第n分区图像信息的类别信息,获得第n工程师信息;步骤s967:获得所有工程师的检测结果;步骤s968:根据所述所有工程师的检测结果,获得第二远程检修方案。
[0033]
具体而言,根据所述第一集成电路的分区信息,获得第一分区图像的类别信息,根据所述类别信息匹配与所述类别一致的工程师信息,进一步而言,所述第二分区图像信息、第三分区图像信息直至第n分区图像信息均采用如所述第一分区图像信息的匹配方法,获得所有工程师的检测结果,对所述检测结果进行整合处理,获得第二远程检修方案,根据所述第二元远程检修方案对所述第一集成电路进行检修处理。
[0034]
进一步而言,本申请实施例还包括:步骤s1010:根据所述第一vr全景图像信息,判断所述第一集成电路封装是否完整;步骤s1020:如果所述第一集成电路封装不完整,获得第一封装位置信息;步骤s1030:根据所述第一封装位置信息,对所述第一集成电路进行封装。
[0035]
具体而言,集成电路封装不仅起到集成电路芯片内键合点与外部进行电气连接的作用,也为集成电路芯片提供了一个稳定可靠的工作环境,对集成电路芯片起到机械或环境保护的作用,从而集成电路芯片能够发挥正常的功能,并保证其具有高稳定性和可靠性。根据所述第一vr全景图像信息判断所述第一集成电路的封装是否完整,当所述第一集成电路封装不完整,对所述第一集成电路进行封装处理。
[0036]
进一步而言,本申请实施例还包括:步骤s1210:根据所述第一vr全景图像信息,判断所述第一集成电路布线是否正确;步骤s1220:如果所述第一集成电路布线不正确,获得第一布线位置信息;步骤s1230:根据所述第一布线位置信息,对所述第一集成电路进行重新布线。
[0037]
具体而言,规范的布线方式可以使得所述第一集成电路更加方便准确的发现问题并解决,通过所述第一vr全景图像信息判断所述第一集成电路的布线是否准确,当所述布线位置不准确时,获得第一布线位置信息,根据所述布线位置信息对所述第一集成电路进行重新不布线处理。
[0038]
综上所述,本申请实施例所提供的一种集成电路的智能检修方法和装置具有如下技术效果:1、由于采用了获得集成电路的图像信息及集成电路的原理图信息,并将所述图像信息输入第一训练模型的方式,基于训练模型不断的自我修正调整的特性,通过所述训练模型
输出区别电路信息,将所述区别电路信息和vr全景图信息获得第一远程检修方案,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0039]
2、由于采用了通过根据电路的类别及工程师的技能属性相互匹配的方式,进而达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0040]
3、由于采用了根据第一故障现象对所述第一远程检修方案进行故障判断的方式,进而保证所述第一远程检修方案适配所述第一集成电路。
[0041]
实施例二基于与前述实施例中一种集成电路的智能检修方法同样发明构思,本发明还提供了一种集成电路的智能检修装置,如图2所示,所述装置包括:第一获得单元11,所述第一获得单元11用于获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;第二获得单元12,所述第二获得单元12用于获得第二图像信息,所述第二图像信息为所述第一集成电路的原理图信息;第一输入单元13,所述第一输入单元13用于将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;第三获得单元14,所述第三获得单元14用于获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第二图像信息的区别电路信息;第四获得单元15,所述第四获得单元15用于根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;第五获得单元16,所述第五获得单元16用于根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;第一检修单元17,所述第一检修得单元17用于根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0042]
进一步的,所述装置还包括:第六获得单元,所述第六获得单元用于获得第一远程工程师数据库;第七获得单元,所述第七获得单元用于根据所述区别电路信息,获得所述区别电路信息的类别信息;第八获得单元,所述第八获得单元用于根据所述区别电路信息的类别信息,从所述第一远程工程师数据库中获得第一工程师信息;第九获得单元,所述第九获得单元用于根据所述第一工程师信息,获得所述第一远程检修方案。
[0043]
进一步的,所述装置还包括:第十获得单元,所述第十获得单元用于获得第一故障现象信息;第一判断单元,所述第一判断单元用于根据所述第一故障现象信息,判断所述第一远程检修方案与所述第一故障现象信息是否匹配;第二检修单元,所述第二检修单元用于如果所述第一远程检修方案与所述第一故障现象信息相匹配,根据所述第一远程检修方案,对所述第一集成电路进行检修。
[0044]
进一步的,所述装置还包括:第十一获得单元,所述第十一获得单元用于根据所述第一图像信息,获得所述第一集成电路的规模等级信息;第十二获得单元,所述第十二获得单元用于获得预定规模等级阈值;第二判断单元,所述第二判断单元用于判断所述第一集成电路的规模等级信息是否在所述预定规模等级阈值之内;第十三获得单元,所述第十三获得单元用于如果所述第一集成电路的规模等级信息不在所述预定规模等级阈值之内,获得第一分区信息;第十四获得单元,所述第十四获得单元用于根据所述第一分区信息,对所述第一图像信息进行分区;第十五获得单元,所述第十五获得单元用于获得第一分区图像信息、第二分区图像信息,直到第n分区图像信息。
[0045]
进一步的,所述装置还包括:第十六获得单元,所述第十六获得单元用于根据所述第一分区图像信息,获得所述第一分区图像信息的类别信息;第十七获得单元,所述第十七获得单元用于根据所述第一分区图像信息的类别信息,获得第二工程师信息;第十八获得单元,所述第十八获得单元用于根据所述第二分区图像信息,获得所述第二分区图像信息的类别信息;第十九获得单元,所述第十九获得单元用于根据所述第二分区图像信息的类别信息,获得第三工程师信息;第二十获得单元,所述第二十获得单元用于以此类推,根据所述第n分区图像信息,获得所述第n分区图像信息的类别信息;第二十一获得单元,所述第二十一获得单元用于根据所述第n分区图像信息的类别信息,获得第n工程师信息;第二十二获得单元,所述第二十二获得单元用于获得所有工程师的检测结果;第二十三获得单元,所述第二十三获得单元用于根据所述所有工程师的检测结果,获得第二远程检修方案。
[0046]
进一步的,所述装置还包括:第三判断单元,所述第三判断单元用于根据所述第一vr全景图像信息,判断所述第一集成电路封装是否完整;第二十四获得单元,所述第二十四获得单元用于如果所述第一集成电路封装不完整,获得第一封装位置信息;第一封装单元,所述第一封装单元用于根据所述第一封装位置信息,对所述第一集成电路进行封装。
[0047]
进一步的,所述装置还包括:第四判断单元,所述第四判断单元用于根据所述第一vr全景图像信息,判断所述第一集成电路布线是否正确;第二十五获得单元,所述第二十五获得单元用于如果所述第一集成电路布线不正确,
获得第一布线位置信息;第二十六获得单元,所述第二十六获得单元用于根据所述第一布线位置信息,对所述第一集成电路进行重新布线。
[0048]
前述图1实施例一中的一种集成电路的智能检修方法的各种变化方式和具体实例同样适用于本实施例的一种集成电路的智能检修装置,通过前述对一种集成电路的智能检修方法的详细描述,本领域技术人员可以清楚的知道本实施例中一种集成电路的智能检修装置的实施方法,所以为了说明书的简洁,在此不再详述。
[0049]
示例性电子设备下面参考图3来描述本申请实施例的电子设备。
[0050]
图3图示了根据本申请实施例的电子设备的结构示意图。
[0051]
基于与前述实施例中一种集成电路的智能检修方法的发明构思,本发明还提供一种集成电路的智能检修装置,其上存储有计算机程序,该程序被处理器执行时实现前文所述一种集成电路的智能检修方法的任一方法的步骤。
[0052]
其中,在图3中,总线架构(用总线300来代表),总线300可以包括任意数量的互联的总线和桥,总线300将包括由处理器302代表的一个或多个处理器和存储器304代表的存储器的各种电路链接在一起。总线300还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口306在总线300和接收器301和发送器303之间提供接口。接收器301和发送器303可以是同一个元件,即收发机,提供用于在传输介质上与各种其他系统通信的单元。
[0053]
处理器302负责管理总线300和通常的处理,而存储器304可以被用于存储处理器302在执行操作时所使用的数据。
[0054]
本发明实施例提供的一种集成电路的智能检修方法,所述方法包括:获得第一图像信息,所述第一图像信息为第一集成电路的图像信息;获得第二图像信息,所述第二图像信息为所述第一集成电路的原理图信息;将所述第一图像信息和所述第二图像信息输入第一训练模型,其中,所述第一训练模型通过多组训练数据训练获得,所述多组训练数据中的每一组训练数据均包括:所述第一图像信息、所述第二图像信息和用来标识区别电路的标识信息;获得所述第一训练模型的第一输出信息,其中,所述第一输出信息包括所述第一图像信息和所述第二图像信息的区别电路信息;根据所述第一图像信息,获得第一vr全景图像信息,所述第一vr全景图像信息为所述第一集成电路的vr全景图像信息;根据所述区别电路信息和所述第一vr全景图像信息,获得第一远程检修方案;根据所述第一远程检修方案,对所述第一集成电路进行检修。解决了现有技术中存在集成电路的微型化影响检修准确性和检修效率的技术问题,达到对对集成电路进行准确检修,提高检修效率的技术效果。
[0055]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0056]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流
程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的系统。
[0057]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令系统的制造品,该指令系统实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0058]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0059]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1