一种基于改进粒子群算法的分动箱齿轮优化设计方法与流程
[0001]
本发明涉及一种分动箱齿轮的优化设计方法,尤其涉及一种基于改进粒子群算法的分动箱齿轮优化设计方法,适用于串联式混合动力拖拉机分动箱。
背景技术:
[0002]
串联式混合动力拖拉机的分动箱输入、输出端分别与发动机输出端,配套旋耕机输入端相连,是混合动力拖拉机联接配套农机具的关键部分。分动箱结构性能的好坏直接影响着混合动力拖拉机整机性能以及配套旋耕机作业性能。因此找到串联式混合动力拖拉机分动箱齿轮最优设计参数对于提升分动箱作业性能有重要作用。
[0003]
分动箱齿轮的设计参数众多,需要优化的目标函数也为多个,在进行齿轮的优化设计时如果对每一个设计参数的每一个可能取值都进行计算再从中选取最优解,那么计算步骤将十分繁杂,且结果并不能保证全局最优,所以找到一种快速收敛且为全局最优的优化算法对于提升分动箱齿轮的优化设计有重要意义。有重要作用。
技术实现要素:
[0004]
本发明的目的在于:提供一种基于改进粒子群算法的分动箱齿轮优化设计方法。首先计算分动箱所有齿轮的体积和分动箱总中心距,并作为目标函数,之后利用改进的粒子群算法快速找到分动箱齿轮全局最优的设计参数。
[0005]
为实现上述目的,本发明采用的技术方案为一种基于改进粒子群算法的分动箱齿轮优化设计方法,其实现过程包括如下步骤:
[0006]
步骤1:建立分动箱齿轮的参数化模型,根据机械设计相关理论计算约束条件量,分动箱齿轮模数m、齿数z、第一级减速比、齿宽系数、总中心距、齿轮与轴不干涉、齿面接触疲劳强度、齿根弯曲强度;
[0007]
步骤2:确定粒子群的个数,优化参数的优化约束范围,粒子更新速度,惯性权重参数,建立粒子群算法,算法中其中惯性权重与粒子更新的速度将随着局部最优解与全局最优解的改变而实时修正;
[0008]
步骤3:使用matlab编写粒子群算优化程序,计算分动箱齿轮的最优设计参数。
[0009]
与现有技术相比,本发明具有如下有益效果:
[0010]
本发明解决了基本粒子群算法优化分动箱齿轮参数容易陷入局部最优的缺点,采用基于改进粒子群算法优化策略。将整个迭代周期分为前期i、中期ii、后期iii三个子周期,在每一个子周期里,惯性权重在最合适的区间范围内波动。这样既提高了算法的收敛速度与收敛精度,同时避免算法陷入局部最优。发明主要包括三部分,第一部分以分动箱齿轮总体积与总中心距建立优化目标函数,第二部分,确定待优化参数的约束条件,第三部分,使用matlab编写粒子群算优化程序,计算分动箱齿轮的最优设计参数。
附图说明
[0011]
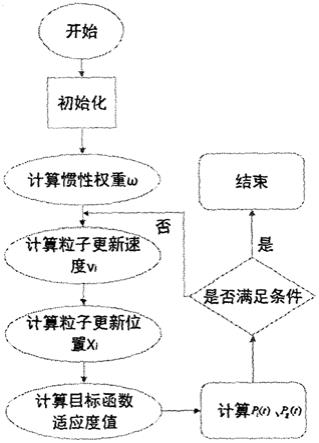
图1为本发明分动箱的结构简图。图2为本发明优化流程图。图3为本发明优化迭代过程图。
具体实施方式
[0012]
下面结合附图对本发明作进一步的详细说明。
[0013]
本发明实施一种基于改进粒子群算法的分动箱齿轮优化设计方法,下面结合附图,对本发明的实施进行具体说明。
[0014]
图1为分动箱的结构简图,输入轴1与发动机的输出端直接相连,将动力通过轴1直接输出到发电机的输入端,当分动箱工作时,动力输入轴1将发动机的机械能传递至z1,z1与z2啮合,将机械能传递至z2;z2带动中间轴2转动,同时,中间轴2带动双联滑动齿轮z3、z5转动;滑动齿轮靠手柄操作拨叉移动,当z3与z4啮合时,z3带动z4转动,z4带动输出轴3转动,将机械能输出给后续装置,此时,动力分配装置输出高速档,轴3输出转速约为1000r/min;当z5与z6啮合时,原理同上,此时动力分配装置处于低速档,轴3输出转速约为540r/min。
[0015]
步骤1,目标函数的建立,
[0016]
以分动箱所有齿轮的体积最小和分动箱总中心距最小为优化目标,f1(x)为齿轮总体积的目标函数,f2(x)为齿轮箱总中心距的目标函数,因而有:(x)为齿轮箱总中心距的目标函数,因而有:
[0017]
上式中为d
i
=mz
i
为齿轮的节圆直径,i=1,2,3,4,5,6;b
i
=mz
j
φ
a
为齿宽,j=1,2,3,4,5,6,z1,z2,z3,z4分别为齿轮z1、z2、z3、z4的齿数;
[0018]
1.1齿轮齿数z2,z4,z6的计算
[0019]
与分动箱配套使用的发动机的标定转速n
e
是1500r/min,发动机额定功率为36kw。并且当发动机的转速达到标定转速的80%~90%时,经轴1、轴2传递到轴3的抵档、高档转速分别需满足标准转速540r/min或1000r/min。本文在设计时选取百分比为90%。因而有齿轮z3与z4,z5与z6分别啮合时,分动箱高低档位的传动比满足:分别啮合时,分动箱高低档位的传动比满足:
[0020]
上式中i
34
和i
56
分别为齿轮z3与z4啮合,z5与z6啮合时,分动箱第二级减速比。因而有:z2=i
12
·
z1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)(5)
[0021]
因而分动箱齿轮优化总的目标函数为:min f(x)=(f1(x)f2(x))
t
ꢀꢀꢀꢀꢀꢀ
(8)需要优化的参数为:x=[x1,x2,x3,x4,x5,x6]=[m,z1,z3,z5,i
12
,φ
a
]
t
[0022]
步骤2,待优化参数的约束条件
[0023]
2.1模数m
i
的限值由分动箱的强度及结构设计确定齿轮模数范围为1~3,即g
1,3,5
(x)=-(m
1,3,5-1)≤0,g
2,4,6
(x)=m
2,4,6-3≤0;
[0024]
2.2齿数z1,z3,z5的限制一般用途的齿轮,标准压力角α为20
°
,为避免根切,在此压力角下标准直齿轮的小齿轮齿数应≥17。因而有:g
7,8,9
(x)=-(z
1,3,5-17)≤0
[0025]
2.3第一级减速比i
12
限制g
10
(x)=-(i
12-1.35)<0,g
11
(x)=i
12-2,5<0
[0026]
2.4齿宽系数φ
a
的限制齿宽系数,规定值为0.2,0.25,0.3,0.4,0.5,0.6,0.8,1.0,1.2。有:g
12
(x)=-(φ
a-0,3)≤0,g
13
(x)=φ
a-0.6≤0
[0027]
2.5总中心距a设计分动箱在设计的串联式混合动力拖拉机中位置安装在发动机和发电机之间,为了避免pto与发电机干涉,要求输入轴1与输出轴3的距离,即分动箱总中心距大于选用的发电机的宽度270mm,即:g
14
(x)=-(a-270)≤0
[0028]
2.6齿轮与轴不干涉轴1、2、3的轴径分别为d1,d2,d3,因而有齿轮z2与轴3不干涉,齿轮z3与轴1不干涉,齿轮z5与轴1不干涉。同时,齿轮副z3z4与z5z6的中心距要满足要求,即有:的中心距要满足要求,即有:的中心距要满足要求,即有:g
18
(x)=a
34-a
56
=0
[0029]
上式中,d1、d3为轴1、轴3直径,d
a2
,d
a3
,d
a5
分别为齿轮z2、z3、z5的齿顶圆直径,d
a2,3,5
=(z
2,3,5
+2)
·
m;
[0030]
2.7齿轮副齿面接触疲劳强度约束齿轮副z1z2、z3z4、z5z6的接触疲劳强度约束有:g
19,20,21
(x)=σ
h12,34,56-[σ
h
]≤0
[0031]
2.8齿轮齿根弯曲强度约束齿轮z1、z2、z3、z4、z5、z6的齿根弯曲强度约束为:g
22,23,24,25,26,27
(x)=σ
f1,2,3,4,5,6-[σ
f
]≤0
[0032]
步骤3,改进的粒子群算法
[0033]
由于优化参数以及目标函数均为多个,所以采用粒子群算法对其进行优化。
[0034]
假设x
i
=(x
i,1
,x
i,2
,
…
,x
i,n
)是微粒i的当前位置,v
i
=(v
i,1
,v
i,2
,
…
v
i,n
)是微粒i的当前飞行速度,那么粒子群算法的进化方程如下:v
i,j
(t+1)=ω*v
i,j
(t)+c1rand1()(p
i,j
(t)-x
i,j
(t))+c2rand2()(p
g,t
(t)-x
i,j
(t))
ꢀꢀꢀꢀ
(9)x
i,j
(t+1)=x
i,j
(t)+v
i,j
(t+1)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)p
i
(t)=(p
i,1
(t),p
i,2
(t),
…
,p
i,n
(t))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)p
g
(t)=(p
g,1
(t),p
g,2
(t),
…
,p
g,n
(t))
ꢀꢀꢀꢀꢀꢀꢀ
(12)
[0035]
上式中t表示迭代代数;p
i
(t)表示微粒i迄今为止经过的历史最好位置;p
g
(t)是当前粒子群搜索到的最好位置,也称为全局最好位置;c1,c2为学习因子,c1主要是为了调节微粒向自身的最好位置飞行的步长,c2是为了调节微粒向全局最好位置飞行的步长,rand1(),rand2()是在[0,1]上的两个相互独立的随机数。ω为惯性权重,它具有维护全局和局部搜索能力的平衡作用,可以使得微粒保持运动惯性,使其有扩展空间搜索的趋势,有能力搜索到新的区域。ω=ω
max-ω
k
*t
ꢀꢀꢀꢀꢀꢀꢀ
(13)
[0036]
式中ω
max
为初始的最大惯性权重值,ω
k
为惯性权重系数的递减斜率。
[0037]
将整个迭代周期分为前期i、中期ii、后期iii三个子周期,在每一个子周期里,惯性权重在最合适的区间范围内波动。具体策略如下:(1)在周期i中,当惯性权重ω的值不超过合适区间范围的下限,惯性权重线性递减,即ω=ω
max-ω
k
*t;
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)(2)在周期ii中,当算法迟迟得不到比当前更优的最优解时,使惯性权重ω在某次迭代加入一定量的常数扰动。此时粒子群群算法更新迭代计算公式如下:v
i,j
(t+1)=ω*v
i,j
(t)+c1rand1()(p
i,j
(t)-x
i,j
(t))+c2rand2()(p
g,i
(t)-x
i,j
(t))x
i,j
(t+1)=x
i,j
(t)+v
i,j
(t+1)ω=ω
max-ω
k
*t+r
t
;r
t
∈[0,0.1]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(15)其中r
t
为扰动常数,本文在一定的扰动概率下取r
t
为0.1。(3)在周期iii中,动态自适应的改变惯性权重系数。在35%的概率下,将周期ii中(15)的惯性权重乘以一个固定范围内的系数。该系数在0.9-1.1区间内。即:v
i,j
(t+1)=ω*v
i,j
(t)+c1rand1()(p
i,j
(t)-x
i,j
(t))+c2rand2()(p
g,t
(t)-x
i,j
(t))x
i,j
(t+1)=x
i,j
(t)+x
i,j
(t+1)ω=(ω
max-ω
k
*t)*r+r
t
r∈[0.9,1.1]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)同时为了防止粒子聚集导致损失多样性,还要在后期引入随机个体来保持粒子群的多样性。在25%的概率下,将解空间里的某一随机个体与粒子群算法得到的粒子进行相应替换。一般在较小概率的引入随机个体,不会影响粒子群算法实际的迭代趋势。
[0038]
改进的粒子群算法计算程序用matlab编写,为了验证改进粒子群算法策略的有效性,分别采用基本粒子群算法和改进粒子群算法对分动箱齿轮适应度函数进行优化设计,种群规模设置为20,最大迭代次数迭代300次。优化流程如图2所示,优化迭代过程如图3所示,优化初值以及最终优化结果如表1所示。
[0039]
表1优化的初始值与最终结果
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1