一种牲畜定位系统的制作方法
[0001]
本实用新型属于牲畜养殖技术领域,特别涉及一种牲畜定位系统。
背景技术:
[0002]
牛舍是指用来饲养奶牛、肉牛的房子。根据所处地域的气候以及养殖规模可以建造不同大小和结构的牛舍。例如,根据南北气候条件的不同,可建造半开放牛舍、塑料暖棚牛舍等。半开放牛舍通风较好,适宜于南方地区,而塑料暖棚牛舍保温效果好,比较适合冬天寒冷的北方。牛舍通常是一个宽15米,长150左右的活动场所,能容纳200头左右的奶牛。
[0003]
在规模化牧场的日常操作中,经常需要找到特定奶牛进行配种、防疫或治疗等工作。目前为了区分不同奶牛通常会佩戴耳标,耳标上印有牛号。目前通常需要人工查看牛号来寻找奶牛,非常耗时耗力。同样,除奶牛以外饲养其他的牲畜也存在类似的问题,如羊、马甚至家禽等。
技术实现要素:
[0004]
针对上述问题,本实用新型的目的在于提供一种牲畜定位系统,以解决人工查看牛号来寻找奶牛,非常耗时耗力的问题。
[0005]
为了实现上述目的,本实用新型采用以下技术方案:
[0006]
一种牲畜定位系统,该牲畜定位系统包括:
[0007]
牲畜标识器,用于保存牲畜标识信息;
[0008]
扫描器,用于通过无线方式读取牲畜标识器中的牲畜标识信息,当读取到指定牲畜的标识信息时,获取扫描器当前的位置信息,并将指定牲畜的标识信息和扫描器当前的位置信息发送给服务器;
[0009]
轨道装置,用于带动扫描器进行移动,以在牲畜的圈舍范围内进行扫描;
[0010]
服务器,用于接收扫描器发送的指定牲畜的标识信息和扫描器当前的位置信息,计算指定牲畜的位置并输出。
[0011]
所述轨道装置包括:电机、电机控制器、主动齿轮、从动齿轮、链条和固定装置;
[0012]
其中,固定装置将主动齿轮和从动齿轮设置于牲畜圈舍的两侧,链条横跨置于牲畜圈舍的上方且与主动齿轮和从动齿轮连接,电机控制器控制电机按固定转速正转或反转,电机通过主动齿轮带动链条运动,扫描器固定在链条上。
[0013]
所述轨道装置还包括:第一接触开关和第一接触开关;其中,第一接触开关和第二接触开关置于链条运动范围的两端,并且第一接触开关和第二接触开关与电机控制器连接;
[0014]
所述扫描器包括:第三接触开关和第四接触开关;
[0015]
当扫描器跟随链条移动到链条运动范围的一端时第一接触开关与第三接触开关接触,当扫描器跟随链条移动到链条运动范围的另一端时第二接触开关与第四接触开关接触,电机控制器通过感知接触开关之间的接触来控制电机正转或反转。
[0016]
所述扫描器还包括:中央处理单元cpu;
[0017]
所述cpu,用于在读到接触开关的接触信号时从0开始计时,计算两次接触开关的接触信号的时间间隔t,根据预先保存的链条运动范围长度l、所述时间间隔t以及读取到指定牲畜的标识信息时的计时时间t,获取扫描器当前的位置信息;其中,扫描器当前的位置信息包括距离d和方向,距离d=t/t*l,方向根据上一次的接触开关的接触信号进行判断得到。
[0018]
所述服务器,用于根据扫描器当前的位置信息和扫描器的扫描半径,计算出指定牲畜在圈舍中的位置范围,并输出相应的示意图。
[0019]
所述扫描器包括:射频识别rfid读头;
[0020]
所述牲畜标识器为rfid电子耳标。
[0021]
所述扫描器包括用于与服务器进行通信的无线通信模块。
[0022]
该系统包括多个扫描器和多个轨道装置。
[0023]
其中,畜圈舍的上方设有与轨道装置平行的绳索,绳索上套设有多个调节环,与扫描器连接的电源线依次穿过多个调节环与市电连接。
[0024]
本实用新型的优点及有益效果是:本实用新型的牲畜定位系统,通过扫描器读取牲畜标识器中的牲畜标识信息及扫描器当前的位置信息,并将指定牲畜的标识信息和扫描器当前的位置信息发送给服务器。服务器接收扫描器发送的指定牲畜的标识信息和扫描器当前的位置信息,计算指定牲畜的位置并输出,从而实现找牲畜的功能。例如,在规模化养殖奶牛的场景下,在需要找到特定奶牛进行配种、防疫或治疗等工作时,方便养殖人员进行查看,减少在牛舍找牛的时间,提高找牛的效率。
附图说明
[0025]
通过以下参照附图对本实用新型的示例性实施例的详细描述,本实用新型的其它特征及其优点将会变得清楚。
[0026]
图1是本实用新型一实施例中牲畜定位系统的结构示意图;
[0027]
图2是本实用新型一实施例中轨道装置的结构示意图;
[0028]
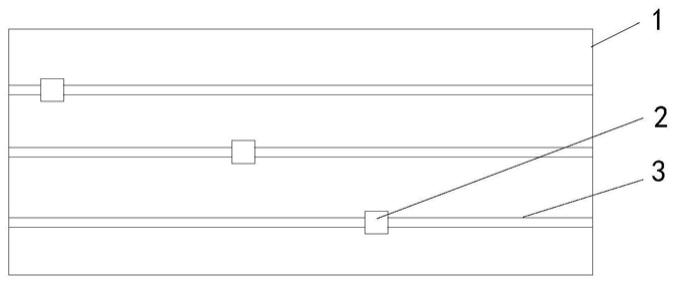
图3是本实用新型另一实施例中牲畜定位系统的结构示意图。
[0029]
图中:1为牲畜圈舍;2为扫描器;201为第三接触开关;202为第四接触开关;3为轨道装置;301为电机;302为主动齿轮;303为第一接触开关;304为电机控制器;305为涨紧齿轮;306为链条;307为从动齿轮;308为第二接触开关;4为绳索;5为电源线;6为调节环。
具体实施方式
[0030]
现在将参照附图来详细描述本实用新型的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。
[0031]
以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。
[0032]
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
[0033]
在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
[0034]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
[0035]
下面,参照附图描述根据本实用新型实施例的各个实施例和例子。
[0036]
图1是本实用新型一实施例中牲畜定位系统的结构示意图;如图1所示,本实用新型提供的一种牲畜定位系统,包括:牲畜标识器、扫描器2、轨道装置3及服务器,其中牲畜标识器用于保存牲畜标识信息;扫描器2用于通过无线方式读取牲畜标识器中的牲畜标识信息,当读取到指定牲畜的标识信息时,获取扫描器2当前的位置信息,并将指定牲畜的标识信息和扫描器2当前的位置信息发送给服务器;轨道装置3用于带动扫描器2进行移动,以在牲畜圈舍1范围内进行扫描;服务器用于接收扫描器2发送的指定牲畜的标识信息和扫描器2当前的位置信息,计算指定牲畜的位置并输出。
[0037]
如图2所示,本实用新型的实施例中,轨道装置3包括电机301、电机控制器304、主动齿轮302、从动齿轮307、链条306和固定装置;其中主动齿轮302和从动齿轮307通过固定装置设置于牲畜圈舍1的上方两侧,链条306横跨于牲畜圈舍1的上方并且与主动齿轮302和从动齿轮307连接。电机301固定在牲畜圈舍1上并且输出端与主动齿轮302连接,电机301通过主动齿轮302带动链条306运动,电机控制器304控制电机301按固定转速正转或反转;扫描器2固定在链条306上,跟随链条306在牲畜圈舍1的范围内进行运动。
[0038]
进一步地,牲畜圈舍1上方设有与链条306啮合的涨紧齿轮305,通过涨紧齿轮305调整链条306的涨紧度。
[0039]
本实用新型的实施例中,轨道装置3还包括:第一接触开关303和第一接触开关303;其中,第一接触开关303和第二接触开关308置于链条306运动范围的两端,并且第一接触开关303和第二接触开关308与电机控制器304连接。
[0040]
扫描器2包括:第三接触开关201和第四接触开关202;当扫描器2跟随链条306移动到链条306运动范围的一端时,第一接触开关303与第三接触开关201接触;当扫描器2跟随链条306移动到链条306运动范围的另一端时,第二接触开关308与第四接触开关202接触,电机控制器304通过感知接触开关之间的接触来控制电机301正转或反转,从而通过链条306带动扫描器2左右移动。
[0041]
进一步地,扫描器2还包括:中央处理单元cpu;cpu用于在读到接触开关的接触信号时从0开始计时,计算两次接触开关的接触信号的时间间隔t,根据预先保存的链条306运动范围长度l、时间间隔t以及读取到指定牲畜的标识信息时的计时时间t,获取扫描器2当前的位置信息;其中,扫描器2当前的位置信息包括距离d和方向,距离d=t/t*l,方向根据上一次的接触开关的接触信号进行判断得到。
[0042]
服务器用于根据扫描器2当前的位置信息和扫描器2的扫描半径,计算出指定牲畜在圈舍中的位置范围,并输出相应的示意图,方便养殖人员快速找到目标牲畜。
[0043]
本实用新型的实施例中,扫描器2还包括:射频识别rfid读头及用于与服务器进行通信的无线通信模块;牲畜标识器为rfid电子耳标,rfid电子耳标设置于牲畜的耳朵上或脖颈上。射频识别rfid读头扫描下方的rfid电子耳标,并把扫描的rfid标签识别信息和扫描器2的当前位置信息通过无线通信模块发送给服务器;服务器接收射频识别rfid读头发
送的电子耳标号和扫描器2的当前位置信息,完成位置计算并显示位置。
[0044]
当牲畜圈舍1比较宽时,可以并排安装多个轨道装置3及设置于各轨道装置3上的多个扫描器2,以覆盖牲畜圈舍1的全部区域,方便养殖人员快速准确地锁定目标牲畜,提高工作效率。
[0045]
如图3所示,本实用新型的另一实施例中,牲畜圈舍1的上方设有与轨道装置3平行的绳索4,绳索4上套设有多个调节环6,与扫描器2连接的电源线5依次穿过多个调节环6与市电连接。在扫描器2行走过程中,调节环6防止电源线5坠落及相互缠绕,提高系统的安全性。
[0046]
本实用新型提供的一种牲畜定位系统,其工作原理是:
[0047]
电机控制器304控制电机301按固定转速正传或反转。扫描器2和链条306刚性连接,并随着链条306移动。当链条306移动到运动范围的任意一端时扫描器2上的接触开关和轨道装置3左侧或右侧固定的接触开发接触,这时电机控制器304和扫描器2都能发现已经到达了一侧。这时电机控制器304发送相反方向的运转指令,使电机301按固定转速反转,令链条306反方向转动。同时,扫描器2读到接触开关接触信号时内部的计时器清零从新开始计时。扫描器2可以区分是左侧还是右侧的接触开关触发的,扫描器2内部自动计算两次接触接触开关接触信号产生的时间间隔t,单位毫秒。扫描器2内部固定保存牲畜圈舍1的长度l(链条306运动范围长度),单位厘米。根据预先保存的链条306运动范围长度l、时间间隔t以及读取到指定牲畜的标识信息时的计时时间t,获取扫描器2当前的位置信息,位置信息包括距离d和方向,当前位置计算方法(认为是匀速运动):
[0048]
d=t/t
×
l
[0049]
扫描器2根据左右侧哪个接触开发触发来判断是往哪个方向移动,并根据距离d找到当前位置。
[0050]
本实用新型的实施例中,一种牲畜定位系统应用于牛舍内,从左到右的全程时间控制应该在3~8分钟,不同长度靠电机控制器的不同参数实现。
[0051]
扫描器2的射频识别rfid读头按固定频率(比如20秒一次)扫描下方的rfid电子耳标,并把扫描的rfid和当前距离信息通过2g/4g模块发送给服务器。服务器端根据距离信息和rfid绘制取奶牛在牛舍的大概位置。rfid扫描半径控制在2米,因此定位精度为
±
1米。
[0052]
本实用新型的牲畜定位系统,通过扫描器读取牲畜标识器中的牲畜标识信息及扫描器当前的位置信息,并将指定牲畜的标识信息和扫描器当前的位置信息发送给服务器。服务器接收扫描器发送的指定牲畜的标识信息和扫描器当前的位置信息,计算指定牲畜的位置并输出,从而实现找牲畜的功能,方便养殖人员进行查看,减少在圈舍找牲畜的时间,提高找牲畜的效率。
[0053]
以上已经描述了本实用新型的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。本实用新型的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1