晶圆缺陷的识别方法及装置与流程
晶圆缺陷的识别方法及装置
1.技术领域
2.本发明涉及半导体器件制造领域,具体是失效分析领域,特别是指一种晶圆缺陷的识别方法。本发明还涉及所述晶圆缺陷的识别装置。
背景技术:
3.随着半导体制造技术尺寸的不断缩小,制造工艺也越来越复杂,晶圆的制造和封装是个涉及几百步工艺的相当长而复杂的过程,这些步骤绝不可能每次都完美进行,污染和材料的变化将结合到工艺中造成晶圆的缺陷损失。维持及提高工艺和产品的良品率对半导体工业至关重要。在晶圆制造工艺中,缺陷已成为制约良率提升的关键。晶圆的缺陷包含很多种,比如短路、断路、杂质沾污等。通常,工厂将在工艺的三个主要点监测,分别是晶圆制造工艺完成时、晶圆中测后和封装完成时进行终测。
4.在半导体器件制造工艺中,测试是保证器件出厂品质的重要环节,通过测试,能将制造过程中产生的一些残次品,或者性能不合格产品挑选出来,或者是通过测试,获知器件的性能参数,能对产品进行等级的区分。
5.缺陷是引起芯片制造良率和可靠性降低的最主要原因,因此对缺陷的管理控制在半导体制造过程中尤为重要。
6.芯片制作工艺涉及成百上千道序,不同阶段图形、缺陷的表征形式差别巨大。尤其对于特定的图形,需要对每个芯片对应位置进行定点拍摄观察,然后进行人工分类。目前会对每片晶圆的特定工艺阶段定点拍摄400
‑
500张图片,从缺陷特征、数量角度进行人工计数、分类。大量单一图形的呈现及缺陷较弱信号的特点,给负责分类处理的工程师带来巨大的工作压力,需要消耗大量工作时间对弱信号的缺陷进行数量上的分类,如何提高弱信号缺陷的分类效率至关重要。
技术实现要素:
7.本发明所要解决的技术问题在于提供一种晶圆缺陷图像处理方法,提高图像中缺陷的提取及分类的效率,减轻人工压力。
8.为解决上述问题,本发明所述的晶圆缺陷图像处理方法,所述方法包括:获取晶圆缺陷图像,所述晶圆缺陷图像包括灰度图像。
9.对所述晶圆缺陷图像进行弱信号区分处理,得到处理后的晶圆缺陷图像;所述弱信号区分处理用于将所述晶圆缺陷图像中的晶圆缺陷与背景进行区分。
10.对所述晶圆缺陷进行定位框选,统计定位框选的晶圆缺陷,得到所述晶圆缺陷图像中的晶圆缺陷数量。
11.进一步地改进是,所述对晶圆缺陷进行定位框选,得到所述晶圆缺陷图像中的晶圆缺陷数量,包括:
根据所述晶圆缺陷的外轮廓进行框定处理,得到所述晶圆缺陷对应的最小定位框。
12.获取所述最小定位框的面积。
13.设定一个面积阈值,确定所述最小定位框的面积大于面积阈值的定位框的数量。
14.将所述定位框的数量确定为所述晶圆缺陷数量。
15.进一步地改进是,根据所述晶圆缺陷的外轮廓进行框定处理,得到所述晶圆缺陷对应的最小定位框,包括:获取所述晶圆缺陷的左上角坐标和右下角坐标。
16.所述最小定位框为矩形。
17.根据所述左上角坐标和所述右下角坐标确定所述晶圆缺陷对应的最小定位框,并计算所述最小定位框的面积。
18.进一步地改进是,所述对所述晶圆缺陷图像进行弱信号区分处理,包括:对所述晶圆缺陷图像进行二值化处理,得到二值化处理后的图像。
19.对所述二值化处理后的图像进行腐蚀处理,得到腐蚀处理后的图像;或者是,对所述二值化处理后的图像进行膨胀处理,得到膨胀处理后的图像。
20.将所述腐蚀处理后的图像或所述膨胀处理后的图像作为所述处理后的晶圆缺陷图像。
21.进一步地改进是,所述对所述晶圆缺陷图像进行二值化处理,得到二值化处理后的图像,包括:获取所述二值化处理对应的像素阈值;根据所述像素阈值将所述灰度图像中的像素点的灰度值进行两极化处理。
22.本发明提供一种晶圆缺陷的识别装置,所述装置包括:图像获取模块,用于获取晶圆缺陷图像,所述晶圆缺陷图像包括灰度图像;数据处理模块,用于对所述晶圆缺陷图像进行弱信号区分处理,得到处理后的晶圆缺陷图像,所述弱信号区分处理通过对获取的晶圆缺陷图像的数据进行计算处理,将所述晶圆缺陷图像中的晶圆缺陷与背景分开;统计模块,用于对所述晶圆缺陷进行定位框选,得到所述晶圆缺陷图像中的晶圆缺陷数量。
23.进一步地改进是,所述的图像获取模块为电子显微镜。
24.进一步地改进是,所述的数据处理模块,还包含有存储介质,对数据处理模块处理的数据,以及能对数据处理控制的计算机程序进行存储。
25.本发明所述的晶圆缺陷的识别方法,通过对缺陷图片进行预处理(二值化、锐化、腐蚀、膨胀等),然后在线自动框选标定缺陷数目并分类,提高了缺陷识别效率。
附图说明
26.图1 是现有的缺陷及人工分类的示意图。
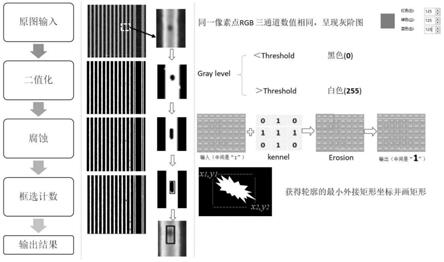
27.图2 是本发明方法对缺陷进行处理的步骤流程图。
28.图3 是本发明方法对缺陷进行处理的步骤示意图。
29.图4 是本发明方法与现有技术的效率对比示意图。
30.图5 是本发明方法检出的缺陷数量误差曲线。图6 是本发明晶圆缺陷的识别装置的结构框图。
具体实施方式
31.本发明所述的晶圆缺陷的识别方法,包含:获取晶圆缺陷图像,所述晶圆缺陷图像包括灰度图像。
32.对所述晶圆缺陷图像进行弱信号区分处理,得到处理后的晶圆缺陷图像;所述弱信号区分处理用于将所述晶圆缺陷图像中的晶圆缺陷与背景进行区分。
33.对所述晶圆缺陷进行定位框选,统计定位框选的晶圆缺陷,得到所述晶圆缺陷图像中的晶圆缺陷数量。
34.具体来时候,参考图2及图3所示,包含如下的步骤:首先获取晶圆缺陷图像的原图,比如灰度图像。原图中同一像素点的rgb三通道数值相同,呈现灰阶图。图3中截取以像素点的rgb三通道的数值均是125。根据缺陷分析的需要以及晶圆上缺陷的种类数量及分布,获取的原图的数量一般为400~500张。
35.再进行数据处理,使缺陷从背景中突出、分离。一种典型的数据处理方法是二值化:对所有获取的晶圆缺陷图像的原图进行二值化处理,将图像上的像素点的灰度值进行两极化处理,使整个图像呈现出明显的黑白效果的过程;二值化处理过程通过设定一个阈值,通过阈值的卡控将信号较弱的缺陷与背景加以区分。
36.图像二值化是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。
37.将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。在数字图像处理中,二值图像占有非常重要的地位,首先,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像。
38.所有灰度大于或等于阈值的像素点被判定为属于缺陷,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。阈值可以根据实际情况自定义,判定小于等于某一阈值的像素点也可以被定义为缺陷。
39.将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。在数字图像处理中,二值图像占有非常重要的地位,首先,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像。
40.如图3中所示,在此实施例中,二值化处理时,通过设定的阈值,所有灰度小于或等于阈值的像素被判定为属于缺陷。其灰度值为255表示,为白色,判定为背景;灰度值为0,为黑色,判定为缺陷。
41.再对原图继续进行腐蚀运算处理,腐蚀运算能放大突出黑色缺陷,使缺陷在背景中更进一步地突出。腐蚀运算是定义结构元素(与模板类似),结构元素在整幅图像中移动,
移动到每个像素点上,只有结构元素与图像上对应像素点的像素值全部相等时,保留这个像素点的值。腐蚀运算能消除物体边界点,使边界点向内部收缩,可以把小于结构元素的物体去除。选取不同大小的结构元素,去除不同大小的物体。如两个物体间有细小的连通,通过腐蚀可以将两个物体分开。
42.腐蚀运算的基本方法通常拖到像素在x域移动,在每一个位置上,当像素b在中心平移到x图像上的某优点(x,y)。如果结构元素内的每一个像素都与以(x,y)为中心的相同邻域中对应像素完全相同,那么就保留(x,y)像素点。对于不满足条件的像素点则全部删除,达到边界向内收缩的效果。
43.对于晶圆缺陷图像的二值化运算,除了腐蚀运算,还可以进行膨胀运算,得到膨胀处理后的图像。
44.不管是进行腐蚀运算还是进行膨胀运算,都能将缺陷放大与背景进行区分,便于将缺陷标记出来。
45.统计运算:对处理后的原图进行定位框选计数,统计定位框选的晶圆缺陷,得到所述晶圆缺陷图像中的晶圆缺陷数量。如图3中所示,通过腐蚀运算将缺陷进一步与背景剥离之后,将晶圆缺陷框选出来。
46.所述对晶圆缺陷进行定位框选,得到所述晶圆缺陷图像中的晶圆缺陷数量,包括:对腐蚀处理后的缺陷获取其轮廓的最小外接矩形坐标并以对角线形式画出矩形,对矩形的面积大小进行阈值卡控,并统计出超出阈值的矩形的数量。
47.根据所述晶圆缺陷的外轮廓进行框定处理,得到所述晶圆缺陷对应的最小定位框。
48.获取所述最小定位框的面积;将所述定位框的数量确定为所述晶圆缺陷数量。
49.根据所述晶圆缺陷的外轮廓进行框定处理,得到所述晶圆缺陷对应的最小定位框,包括:获取所述晶圆缺陷的左上角坐标和右下角坐标;对于缺陷的框选采用对角线形式选定两个对角的坐标(x1,y1)、(x2,y2),然后自动划定形成矩形框。
50.根据所述左上角坐标和所述右下角坐标确定所述晶圆缺陷对应的最小定位框,并计算所述最小定位框的面积。
51.设定一个面积阈值,确定所述最小定位框的面积大于该设定的面积阈值的定位框的数量,统计该数量即为晶圆缺陷的数量。
52.步骤五,输出结果。
53.通过上述方法,我们对55nm工艺节点的某一产品进行缺陷分类,总共500张缺陷图片,人工分类约需120~150min,如图4及图5所示,本发明可将分类时间缩短至15min,较原方法效率提高7~9倍,缺陷预测的平均准确率达到88%,缺陷数量误差
±
0.1ea。
54.本发明所述的晶圆缺陷的识别装置,如图6所示,所述装置包括:图像获取模块,用于获取晶圆缺陷图像,所述晶圆缺陷图像包括灰度图像。在一实施例中,该图像获取模块为电子显微镜,或者是相机等其他具有图像采集功能的器件。
55.数据处理模块,该数据处理模块包括运算单元以及存储介质,用于对所述晶圆缺陷图像进行弱信号区分处理,得到处理后的晶圆缺陷图像。存储介质中有至少一条指令、至少一段程序、代码集或指令集,所述指令、所述程序、所述代码集或所述指令集由所述处理
器加载并执行以实现所述的晶圆缺陷的识别。所述存储介质还对数据运算处理的结果进行存储。所述弱信号区分处理通过对获取的晶圆缺陷图像的数据进行计算处理,将所述晶圆缺陷图像中的晶圆缺陷与背景分开。
56.统计模块,用于对所述晶圆缺陷进行定位框选,得到所述晶圆缺陷图像中的分离出晶圆缺陷数量并输出结果。
57.以上仅为本发明的优选实施例,并不用于限定本发明。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1