一种市政道路检测系统的制作方法
1.本发明涉及计算机应用技术领域,尤其是涉及一种市政道路检测系统。
背景技术:
2.市政道路平整铺设好后,因大量的机动车辆的倾轧、环境中的酸碱性物质对市政道路进行腐蚀等原因造成市政道路的混凝土结构变化导致市政道路变形甚至道路断裂,导致交通事故。为提高道路交通安全,需要对道路质量进行检测。现有技术中采用探地雷达对道路路年厚度进行检测。探地雷达的工作原理是通过路面向下发射高频的电磁波,由接收天线接收到返回路面的电磁波,电磁波在地下穿越不同的介质层,并以一种电性差异进行接收电磁波的波形、振幅变化情况等特点来推断介质的空间状态和结构形态的,最终得到检测的路面厚度和道路路面弯沉的数据。但是上述检测方法的测量精度不高且测量结果并不能直接反映道路质量,因此亟需一种市政道路检测系统。
技术实现要素:
3.本发明的目的在于提供了一种只需要用钉子在道路表面敲出微小的裂缝即可了解市政道路混凝土抗压强度的市政道路检测系统。
4.为实现上述目的,本发明采取的技术方案为:一种市政道路检测系统,包括道路洼地数据库和裂缝形态数据库,所述道路洼地数据库存储有若干洼地钉测数据组,所述洼地钉测数据组存储有洼地信息和钉入信息,所述洼地信息反映洼地的开口大小和洼地的深度值,所述钉入信息反映钉入力的大小和钉子的型号,所述洼地信息与所述钉入信息一一对应,所述裂缝形态数据库存储有若干裂缝形态数据组,不同所述裂缝形态数据组对应不同的所述钉入信息,所述裂缝形态数据组存储有若干裂缝图像信息和道路质量信息,所述裂缝图像信息反映裂缝的长度和形态,所述道路质量信息反映混凝土抗压强度,所述裂缝图像信息与所述道路质量信息一一对应;
5.所述市政道路检测系统还包括网格灯、摄像头和中心服务器,所述摄像头用于获得被所述网格灯照射的道路的图像信息,所述中心服务器内配置有数据处理策略,所述数据处理策略包括三维模型建立步骤、洼地信息获取步骤、第一钉入点确定步骤、钉入条件确定步骤和道路质量确定步骤;
6.所述三维模型建立步骤,获得被所述网格灯照射的道路的图像信息作为道路图像信息,根据所述道路图形信息建模得到道路三维图;
7.所述洼地信息获取步骤,在所述道路三维图中建立三维坐标,获得所述道路三维图中洼地的坐标,所述洼地的坐标包括洼地边沿坐标和洼地底端坐标;
8.所述第一钉入点确定步骤,从所述洼地信息获取步骤中获得洼地的坐标,并根据第一钉入点定位算法计算第一钉入点的坐标,所述第一钉入点定位算法包括:
9.[0010][0011]
其中,x
d1
为第一钉入点的横坐标,x
b
为洼地边沿上某一点的横坐标,x
w
为洼地底端的横坐标,y
d1
第一钉入点的纵坐标,y
b
为洼地边沿上某一点的纵坐标,y
w
为洼地底端的纵坐标,a表示预设的第一调节参数,b表示预设的第二调节参数,c表示预设的第三调节参数;根据所述第一钉入点的横坐标和纵坐标确定洼地表面两点疑似第一钉入点,选择z轴坐标更接近洼地底端的z轴坐标的点作为第一钉入点;
[0012]
所述钉入条件确定步骤,根据洼地的坐标得到洼地测定信息,以所述洼地测定信息为索引从所述道路洼地数据库中获得对应的钉入信息;
[0013]
所述道路质量确定步骤,获得根据所述钉入信息打钉后的洼地图像作为实际裂缝图像信息,以所述钉入信息为索引从所述裂缝形态数据库中得到对应的裂缝形态数据组,根据所述实际裂缝图像信息在对应的所述裂缝形态数据组中匹配裂缝图像信息得到对应的道路质量信息。
[0014]
作为优选,所述钉入条件确定步骤中,获得洼地边沿上相同横坐标的两点的纵坐标之差得到若干疑似边沿开口,取若干所述疑似边沿开口的最大值为洼地开口大小,计算洼地边沿上各点与洼地底端的z轴坐标之差得到若干疑似洼地深度,取若干所述疑似洼地深度的最大值得到洼地的深度值。
[0015]
作为优选,所述第一调节参数与洼地开口大小成正比。
[0016]
作为优选,所述第二调节参数与所述洼地深度值成正比,所述第三调节参数与所述洼地深度值成反比。
[0017]
作为优选,所述数据处理策略还包括钉入点再确定步骤,若洼地中存在凸地,则凸地的顶点为第二钉入点,且先钉入所述第一钉入点再钉入第二钉入点。
[0018]
作为优选,所述钉入点再确定步骤中,获得凸地的边沿的坐标,并根据第二钉入点定位算法计算第三钉入点的坐标,所述第二钉入点定位算法包括:
[0019][0020]
y
d3
=y
t
‑
d
[0021]
其中,x
d3
为第三钉入点的横坐标,x
t
为凸地边沿上某一点的横坐标,y
d3
第一钉入点的纵坐标,y
t
为凸地边沿上某一点的纵坐标,d表示预设的第四调节参数;根据所述第三钉入点的横坐标和纵坐标确定凸地表面两点疑似第一钉入点,选择z轴坐标更接近凸地顶点的z轴坐标的点作为第三钉入点,先钉入所述第三钉入点再钉入第二钉入点。
[0022]
作为优选,若干第一钉入点形成第一钉入圈,若干第三钉入点形成第二钉入圈,所述第一钉入圈若与第二钉入圈有重合点,则重合点为新的第一钉入点并取消第三钉入点。
[0023]
作为优选,计算凸地边沿上各点与凸地顶点的z轴坐标之差得到若干疑似凸地高度,取若干所述疑似凸地高度的最大值得到凸地高度值,所述第四调节参数与所述凸地高度值成正比。
[0024]
作为优选,所述数据处理策略还包括钉入点修正步骤,从所述第一钉入点确定步
骤中得到第一钉入点的坐标,在洼地表面均匀施加不断增加的压力,记录最快崩裂的点并得到其坐标作为钉入点实际坐标,根据所述钉入点实际坐标与所述第一钉入点的坐标的偏差对第一调节参数、第二调节参数和第三调节参数进行修正。
[0025]
作为优选,所述钉入点修正步骤中获得所述洼地信息,记录洼地表面产生崩裂时的压力值作为实际压力值,并记录崩裂时的洼地图像信息作为实际裂缝图像信息并记录崩裂时混凝土的抗压强度作为实际抗压强度,以所述洼地信息为索引从道路洼地数据库中得到对应的钉入信息,根据所述钉入信息与实际压力值的偏差对钉入信息进行修正;以修正后的钉入信息为索引从裂缝形态数据库中得到对应的裂缝形态数据组,根据裂缝形态数据组中裂缝图像信息和道路质量信息与实际裂缝图像信息和实际抗压强度对裂缝图像信息和道路质量信息进行修正。
[0026]
与现有技术相比,本发明的有益效果为:在道路三维图中清晰呈现洼地的位置与形状,获得洼地边沿坐标和洼地底端的坐标并通过第一钉入点定位算法计算得到洼地表面的弱受力点。从道路洼地数据库中匹配得到对应的钉入信息,从裂缝形态数据库中匹配得到对应的裂缝形态数据组,获得根据钉入信息打钉后的洼地图像后从裂缝形态数据组得到对应的道路质量信息,道路质量信息反映了混凝土的抗压强度,道路质量信息由历史实际道路抗压试验测得,匹配得到的数据接近道路实际抗压数据,以此可推测市政道路的坚固程度和预期寿命。同时本发明只需通过钉子在道路表面钉处微小的裂痕,对道路的质量几乎不会产生负面影响。
附图说明
[0027]
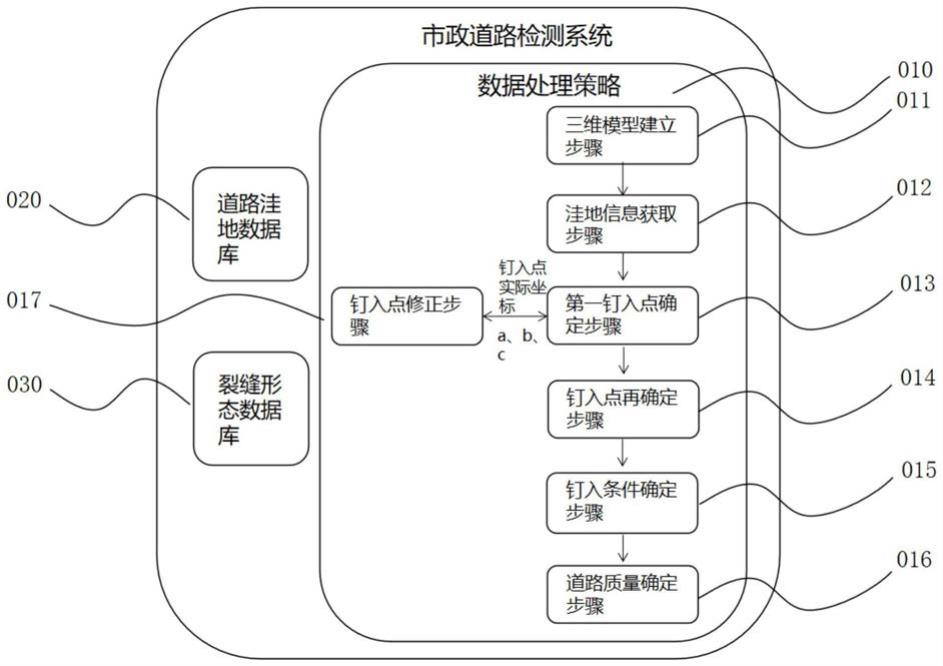
图1为市政道路检测系统的原理图。
[0028]
附图标记说明如下:010、数据处理策略;011、三维模型建立步骤;012、洼地信息获取步骤;013、第一钉入点确定步骤;014、钉入点再确定步骤;015、钉入条件确定步骤;016、道路质量确定步骤;017、钉入点修正步骤;020、道路洼地数据库;030、裂缝形态数据库。
具体实施方式
[0029]
下面结合附图和实施例,对本发明进一步详细说明。
[0030]
实施例1:
[0031]
如图1所示,一种市政道路检测系统,包括道路洼地数据库020和裂缝形态数据库030,所述道路洼地数据库020存储有若干洼地钉测数据组,所述洼地钉测数据组存储有洼地信息和钉入信息,所述洼地信息反映洼地的开口大小和洼地的深度值,所述钉入信息反映钉入力的大小和钉子的型号,所述洼地信息与所述钉入信息一一对应,所述裂缝形态数据库030存储有若干裂缝形态数据组,不同所述裂缝形态数据组对应不同的所述钉入信息,所述裂缝形态数据组存储有若干裂缝图像信息和道路质量信息,所述裂缝图像信息反映裂缝的长度和形态,所述道路质量信息反映混凝土抗压强度,所述裂缝图像信息与所述道路质量信息一一对应;
[0032]
所述市政道路检测系统还包括网格灯、摄像头和中心服务器,所述摄像头用于获得被所述网格灯照射的道路的图像信息,所述中心服务器内配置有数据处理策略010,所述数据处理策略010包括三维模型建立步骤011、洼地信息获取步骤012、第一钉入点确定步骤
013、钉入条件确定步骤015和道路质量确定步骤016;
[0033]
所述三维模型建立步骤011,获得被所述网格灯照射的道路的图像信息作为道路图像信息,根据所述道路图形信息建模得到道路三维图;
[0034]
所述洼地信息获取步骤012,在所述道路三维图中建立三维坐标,获得所述道路三维图中洼地的坐标,所述洼地的坐标包括洼地边沿坐标和洼地底端坐标;
[0035]
所述第一钉入点确定步骤013,从所述洼地信息获取步骤012中获得洼地的坐标,并根据第一钉入点定位算法计算第一钉入点的坐标,所述第一钉入点定位算法包括:
[0036][0037][0038]
其中,x
d1
为第一钉入点的横坐标,x
b
为洼地边沿上某一点的横坐标,x
w
为洼地底端的横坐标,y
d1
第一钉入点的纵坐标,y
b
为洼地边沿上某一点的纵坐标,y
w
为洼地底端的纵坐标,a表示预设的第一调节参数,b表示预设的第二调节参数,c表示预设的第三调节参数;根据所述第一钉入点的横坐标和纵坐标确定洼地表面两点疑似第一钉入点,选择z轴坐标更接近洼地底端的z轴坐标的点作为第一钉入点;
[0039]
所述钉入条件确定步骤015,根据洼地的坐标得到洼地测定信息,以所述洼地测定信息为索引从所述道路洼地数据库020中获得对应的钉入信息;
[0040]
所述道路质量确定步骤016,获得根据所述钉入信息打钉后的洼地图像作为实际裂缝图像信息,以所述钉入信息为索引从所述裂缝形态数据库030中得到对应的裂缝形态数据组,根据所述实际裂缝图像信息在对应的所述裂缝形态数据组中匹配裂缝图像信息得到对应的道路质量信息。
[0041]
在道路三维图中清晰呈现洼地的位置与形状,获得洼地边沿坐标和洼地底端的坐标并通过第一钉入点定位算法计算得到洼地表面的弱受力点。从道路洼地数据库020中匹配得到对应的钉入信息,从裂缝形态数据库030中匹配得到对应的裂缝形态数据组,获得根据钉入信息打钉后的洼地图像后从裂缝形态数据组得到对应的道路质量信息,道路质量信息反映了混凝土的抗压强度,道路质量信息由历史实际道路抗压试验测得,匹配得到的数据接近道路实际抗压数据,以此可推测市政道路的坚固程度和预期寿命。同时本发明只需通过钉子在道路表面钉处微小的裂痕,对道路的质量几乎不会产生负面影响。
[0042]
其中,所述钉入条件确定步骤015中,获得洼地边沿上相同横坐标的两点的纵坐标之差得到若干疑似边沿开口,取若干所述疑似边沿开口的最大值为洼地开口大小,计算洼地边沿上各点与洼地底端的z轴坐标之差得到若干疑似洼地深度,取若干所述疑似洼地深度的最大值得到洼地的深度值。所述第一调节参数与洼地开口大小成正比。所述第二调节参数与所述洼地深度值成正比,所述第三调节参数与所述洼地深度值成反比。
[0043]
实施例2:
[0044]
与实施例1的不同之处在于:所述数据处理策略010还包括钉入点再确定步骤014,若洼地中存在凸地,则凸地的顶点为第二钉入点,且先钉入所述第一钉入点再钉入第二钉
入点。
[0045]
所述钉入点再确定步骤014中,获得凸地的边沿的坐标,并根据第二钉入点定位算法计算第三钉入点的坐标,所述第二钉入点定位算法包括:
[0046][0047]
y
d3
=y
t
‑
d
[0048]
其中,x
d3
为第三钉入点的横坐标,x
t
为凸地边沿上某一点的横坐标,y
d3
第一钉入点的纵坐标,y
t
为凸地边沿上某一点的纵坐标,d表示预设的第四调节参数;根据所述第三钉入点的横坐标和纵坐标确定凸地表面两点疑似第一钉入点,选择z轴坐标更接近凸地顶点的z轴坐标的点作为第三钉入点,先钉入所述第三钉入点再钉入第二钉入点。
[0049]
若干第一钉入点形成第一钉入圈,若干第三钉入点形成第二钉入圈,所述第一钉入圈若与第二钉入圈有重合点,则重合点为新的第一钉入点并取消第三钉入点。
[0050]
计算凸地边沿上各点与凸地顶点的z轴坐标之差得到若干疑似凸地高度,取若干所述疑似凸地高度的最大值得到凸地高度值,所述第四调节参数与所述凸地高度值成正比。
[0051]
实施例3:
[0052]
与实施例2的不同之处在于:所述数据处理策略010还包括钉入点修正步骤017,从所述第一钉入点确定步骤013中得到第一钉入点的坐标,在洼地表面均匀施加不断增加的压力,记录最快崩裂的点并得到其坐标作为钉入点实际坐标,根据所述钉入点实际坐标与所述第一钉入点的坐标的偏差对第一调节参数、第二调节参数和第三调节参数进行修正。
[0053]
所述钉入点修正步骤017中获得所述洼地信息,记录洼地表面产生崩裂时的压力值作为实际压力值,并记录崩裂时的洼地图像信息作为实际裂缝图像信息并记录崩裂时混凝土的抗压强度作为实际抗压强度,以所述洼地信息为索引从道路洼地数据库020中得到对应的钉入信息,根据所述钉入信息与实际压力值的偏差对钉入信息进行修正;以修正后的钉入信息为索引从裂缝形态数据库030中得到对应的裂缝形态数据组,根据裂缝形态数据组中裂缝图像信息和道路质量信息与实际裂缝图像信息和实际抗压强度对裂缝图像信息和道路质量信息进行修正。
[0054]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1