一种高速两栖车海豚运动稳定性智能控制方法
1.本发明涉及高速两栖车技术领域,更具体的说,是涉及一种高速两栖车海豚运动稳定性智能控制方法。
背景技术:
2.海豚运动是船舶纵向运动过程中的一种姿态不稳定的现象,表现为纵摇角以及垂向升沉量的不断变化,其往往出现在滑行艇等小型快速水面舰艇上,而高速下航行姿态的改变过大往往导致船体结构遭受局部过大载荷,对人员舒适性甚至航行安全都有严重影响。而对于高速水陆两栖车,其自身的长宽比相较于高速艇而言较小,其航行姿态受外界力的影响更加明显,因此其在高速航态下的纵向运动稳定性问题依然不可忽视。
3.一般来说,滑行体的速度越高,其越容易发生海豚运动,而通过调整车辆的重心在纵向的位置虽能在一定程度上延后海豚运动发生的速度节点,但是其调节能力有限,并且当重心过于靠前时,会对车辆在中低速阶段的性能有较大不利影响,使其难以顺利进入滑行状态。
4.阻流板和压浪板作为常见的船舶航行性能姿态调节的装置,能够改变底面的动压力分布,起到控制纵摇姿态和改善海豚运动稳定性的效果;但是作为一种附体结构,其作用相对固定,用于高速艇时姿态单一且可控性差,对航态的改变不能很好的适应,在某些航行工况下容易出现过度调节的情况。
5.因此,需要在两栖车航行过程中实现上述附体的动态调节,并且在调节过程中克服根据经验方法控制车辆的调节装置的不足,提高纵向稳定性的控制精度。
技术实现要素:
6.本发明的目的是针对现有技术中存在的技术缺陷,而提供一种能够保障控制精度及稳定性的高速两栖车海豚运动稳定性智能控制方法。
7.为实现本发明的目的所采用的技术方案是:
8.一种高速两栖车海豚运动稳定性智能控制方法,包括下述步骤:
9.步骤1,根据目标两栖车和压浪板模型建立车辆静水高速直航运动仿真模型;
10.步骤2,根据车辆纵向稳定性的影响因素,在各影响因素的变动范围内选取样本点,采用步骤1建立的所述车辆静水高速直航运动仿真模型计算得到高速下的车辆纵向运动参数时历,利用所述车辆纵向运动参数时历分析得到稳定性数值特征,将各样本点及其对应的所述稳定性数值特征组合建立分类识别数据库;
11.步骤3,利用支持向量机分类识别方法对步骤2所建立的分类识别数据库进行分类识别,得到目标分类结果;
12.步骤4,使用步骤3得到的目标分类结果作为高速运动下车辆纵向稳定性的判别依据,控制车辆压浪板角度的调节,完成高速下车辆稳定性的控制调节。
13.所述步骤2包括下述步骤:
14.步骤2.1,将重心纵向位置参数l
xg
、体积傅氏数fr
▽
和压浪板的下旋角度α作为车辆纵向稳定性的影响因素,根据各影响因素变动的范围,建立车辆纵向运动稳定性的参数设计空间;
15.步骤2.2,采用拉丁超立方抽样方法在步骤2.1所建立的所述车辆纵向运动稳定性的参数设计空间内抽取样本点参数形成一次输入参数集;
16.步骤2.3,将所述一次输入参数集中的样本点参数分别输入步骤1所述的车辆静水高速直航运动仿真模型进行计算,得到一次仿真输出结果,即收敛后的车辆纵摇角时历θ(t)与升沉时历z(t);
17.步骤2.4,根据步骤2.3所得的一次仿真输出结果得到一次输入参数集各样本点对应的稳定性数值特征;
18.步骤2.5,将所述一次输入参数集中的各个样本点及其对应的稳定性数值特征组合得到所述分类识别数据库。
19.所述步骤2.4中的所述稳定性数值特征为:若样本点对应输出的纵摇角时历θ(t)与升沉时历z(t)均不具有特定频率的振荡,即判定该样本点对应的车辆运动姿态保持稳定,记该样本点对应的稳定性数值特征为
‘1’
,否则记为
‘‑1’
。
20.所述步骤3包括下述步骤:
21.步骤3.1,以步骤2所建立的分类识别数据库为对象,采用基于线性核函数的支持向量机模型进行分类学习,得到初始分类超平面;
22.步骤3.2,在所述初始分类超平面上随机选取样本点组成二次输入参数集,将所述二次输入参数集中的样本点参数输入所述车辆静水高速直航运动仿真模型,输出二次仿真结果,根据所述二次仿真结果得到所述二次输入参数集中的各个样本点对应的稳定性数值特征,并将所述二次输入参数集中的各个样本点及其对应的稳定性数值特征纳入所述分类识别数据库;
23.步骤3.3,以步骤3.2所得分类识别数据库的样本点及其对应的稳定性数值特征为对象,采用基于多项式核函数的非线性支持向量机模型,进行二次分类识别,得到二次分类超平面,将所述二次分类超平面向具有稳定特征的数据一侧平移,得到目标分类超平面,并将所述目标分类超平面的方程作为分类结果。
24.所述步骤4包括下述步骤:
25.步骤4.1,将所述目标分类超平面的方程输入车辆的稳定性控制模块,作为压浪板角度调节的依据;
26.步骤4.2,将重心纵向位置参数l
xg
以及实时监测的航速结果换算的体积傅氏数fr
▽
参数一起代入所述目标分类超平面的方程,计算得到压浪板的目标下旋角度α,并输出控制信号给压浪板调节装置;
27.步骤4.3,所述压浪板调节装置根据所得目标下旋角度控制压浪板进行旋转动作,完成高速下车辆航行稳定性的控制调节。
28.将车辆在实际航行中关于航行稳定性的有效样本数据作为补充添加到所述分类识别数据库中,重复步骤3
‑
步骤4,完成高速下车辆航行稳定性的控制调节。
29.所述步骤1包含下述内容:
30.创建伴随两栖车运动的重叠区域和模拟运动环境的背景区域,车辆表面网格尺寸
取车辆长度的1
‰
,表面y+值取50进行网格划分,区域界面之间插值使用“加权距离”属性;
31.基于ranse方程进行流体的连续性与动量守恒控制,引入剪切应力传输k
‑
ω两方程湍流模型,使得控制方程封闭可解,采用有限体积法(fvm)进行控制方程的离散,其中对流项使用“二阶迎风”插值格式,扩散项的离散采用“中心差分”格式;
32.车辆的运动开放纵摇与升沉两自由度,基于车辆质心平移及围绕质心旋转的流体动力与自身重力的平衡求解两自由度的运动状况;
33.基于库朗数等于0.5的准则确定迭代时间步长,并采用simple分离式算法进行求解,得到车辆的纵摇与升沉时历结果。
34.与现有技术相比,本发明的有益效果是:
35.1、本发明的方法能够正确分析附体的调节程度与车辆重心位置以及航行速度之间的相互关系,寻找靠近稳定性临界位置的参数组合,以确保车辆的航行稳定性满足要求,同时又不会过度调节。
36.2、本发明的方法基于支持向量机分类的高速水陆两栖车海豚运动稳定性分析判定,对不同参数工况下车辆航行的稳定性状态的预报简单智能、精准高效。
37.3、本发明的基于支持向量机分类的控制方法可根据不同的航速及重心纵向位置情况,对压浪板的动作做针对性控制,能够适应不同的航态,减少了出现过度调节而影响航行性能的情况。
38.4、本发明的控制方法基于支持向量机分类超平面控制压浪板角度,保证了压浪板的调节满足海豚运动稳定性的要求,并且实践中的样本数据可不断用于向量机模型的改进,提升了控制精度。
附图说明
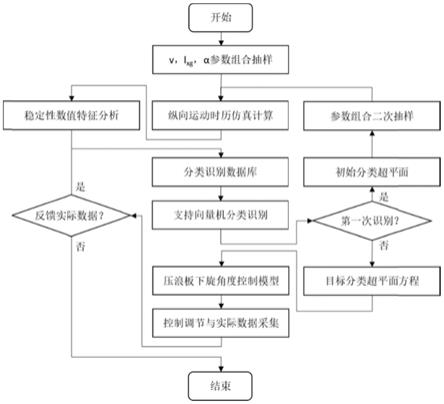
39.图1所示为两栖车海豚运动稳定性智能控制方法流程示意图;
40.图2所示为两栖车纵摇角时历θ(t)示意图;
41.图3所示为两栖车升沉时历z(t)示意图;
42.图4所示为基于支持向量机的样本点稳定性数值特征分类示意图。
具体实施方式
43.以下结合附图和具体实施例对本发明进行详细说明。
44.如图1所示的高速两栖车海豚运动稳定性智能控制方法的流程示意图,其主要特征在于:在设计范围内对速度v、重心纵向位置l
xg
以及压浪板下旋角α的参数组合进行抽样,并计算其对应下的车辆纵向运动时历,根据运动时历的稳定性赋予上述参数样本点不同的数值特征,并形成分类识别数据库;而后利用支持向量机分类识别算法,确定车辆纵向运动稳定与失稳之间的界限,即目标分类超平面,并根据目标超平面方程构建航行中压浪板下旋角的控制模型,进行稳定性调节。
45.具体包括下述步骤:
46.步骤1,根据目标两栖车和压浪板模型建立车辆静水高速直航运动仿真模型,计算指定情况下的车辆运动响应与水动力结果。
47.车辆静水高速直航运动仿真模型的建立方法可以采用现有技术。本实施例中采用
基于cfd数值模拟的常规逻辑方法和针对此两栖车特定相关参数的设置,具体为:
48.创建伴随两栖车运动的重叠区域和模拟运动环境的背景区域,车辆表面网格尺寸取车辆长度的1
‰
,表面y+值取50进行网格划分,区域界面之间插值使用“加权距离”属性;
49.基于ranse方程进行流体的连续性与动量守恒控制,引入剪切应力传输k
‑
ω两方程湍流模型,使得控制方程封闭可解,采用有限体积法(fvm)进行控制方程的离散,其中对流项使用“二阶迎风”插值格式,扩散项的离散采用“中心差分”格式;
50.车辆的运动开放纵摇与升沉两自由度,基于车辆质心平移及围绕质心旋转的流体动力与自身重力的平衡求解两自由度的运动状况;
51.基于库朗数等于0.5的准则确定迭代时间步长,并采用simple分离式算法进行求解,得到车辆的纵摇与升沉时历结果。
52.步骤2,根据车辆纵向稳定性的影响因素,在各影响因素的变动范围内选取样本点,采用步骤1建立的所述车辆静水高速直航运动仿真模型计算得到高速下的车辆纵向运动参数时历,利用所述车辆纵向运动参数时历分析得到稳定性数值特征,将各样本点及其对应的所述稳定性数值特征组合建立分类识别数据库;本实施例中的车辆纵向稳定性的影响因素包括重心纵向位置参数l
xg
(即重心纵坐标x
g
和船长l的比值)、体积傅氏数fr
▽
和压浪板的下旋角度α;具体步骤如下:
53.步骤2.1,根据重心纵向位置参数l
xg
、体积傅氏数fr
▽
和压浪板的下旋角度α变动的范围,建立车辆纵向运动稳定性的参数设计空间;
54.步骤2.2,采用拉丁超立方抽样方法在步骤2.1所建立的所述车辆纵向运动稳定性的参数设计空间内抽取样本点参数形成一次输入参数集;
55.步骤2.3,将所述一次输入参数集中的样本点参数分别输入步骤1所述的车辆静水高速直航运动仿真模型进行计算,得到一次仿真输出结果,即收敛后的车辆纵摇角时历θ(t)与升沉时历z(t);
56.步骤2.4,根据步骤2.3所得的一次仿真输出结果得到一次输入参数集各样本点对应的稳定性数值特征;即:若样本点对应输出的纵摇角时历θ(t)与升沉时历z(t)均不具有特定频率的振荡,即判定该样本点对应的车辆运动姿态保持稳定,记该样本点对应的稳定性数值特征为
‘1’
,否则记为
‘‑1’
;图2与图3分别为某一工况下的纵摇角时历θ(t)与升沉时历z(t)曲线,根据其时历曲线可以看出该工况下车辆处于纵向运动失稳的状态;
57.步骤2.5,将所述一次输入参数集中的各个样本点及其对应的稳定性数值特征组合得到分类识别数据库。
58.步骤3,利用支持向量机分类识别方法对步骤2所建立的所述分类识别数据库进行分类识别,得到目标分类结果;具体步骤如下:
59.步骤3.1,以步骤2所建立的分类识别数据库为对象,采用基于线性核函数的支持向量机模型进行分类学习,得到初始分类超平面;
60.步骤3.2,在所述初始分类超平面上随机选取样本点组成二次输入参数集,将所述二次输入参数集中的样本点参数输入所述车辆静水高速直航运动仿真模型,输出二次仿真结果,根据所述二次仿真结果得到所述二次输入参数集中的各个样本点对应的稳定性数值特征,并将所述二次输入参数集中的各个样本点及其对应的稳定性数值特征纳入所述分类识别数据库;
61.其中,二次仿真结果为二次输入参数集对应的车辆纵摇角时历θ(t)与升沉时历z(t),所述二次输入参数集中的各个样本点对应的稳定性数值特征的判断方法与步骤2.4相同,即:若样本点对应输出的纵摇角时历θ(t)与升沉时历z(t)均不具有特定频率的振荡,即判定该样本点对应的车辆运动姿态保持稳定,记该样本点对应的稳定性数值特征为
‘1’
,否则记为
‘‑1’
;
62.步骤3.3,以步骤3.2所得分类识别数据库的样本点及其对应的稳定性数值特征为对象,采用基于多项式核函数的非线性支持向量机模型,进行二次分类识别,得到二次分类超平面,将所述二次分类超平面向具有稳定特征的数据一侧平移,得到目标分类超平面,建立所述目标分类超平面的方程作为分类结果。
63.如图3为基于支持向量机的样本点稳定性特征分类示意图,所采集的样本点分布在参数设计空间内。图中“+”点代表各样本中对应处于稳定性状态的数据点,
“□”
点对应处于不稳定状态的各样本数据点,所示阴影表示上述所得的目标分类超平面,即车辆纵向运动失稳与保持稳定之间的分界面。可以看出两类数据点集基本分布在目标超平面的两侧。
64.步骤4,使用步骤3得到的目标分类结果作为高速运动下车辆纵向稳定性的判别依据,控制车辆压浪板角度的调节,完成高速下车辆稳定性的控制调节。具体步骤如下:
65.步骤4.1,将所述目标分类超平面的方程输入车辆的稳定性控制模块,作为压浪板角度调节的依据;
66.步骤4.2,将重心纵向位置参数l
xg
以及实时监测的航速结果换算的体积傅氏数fr
▽
参数一起代入所述目标分类超平面的方程,计算得到压浪板的目标下旋角度α,并输出控制信号给压浪板调节装置;
67.步骤4.3,所述压浪板调节装置根据所得目标下旋角度控制压浪板进行旋转动作,完成高速下车辆航行稳定性的控制调节。
68.在车辆控制过程中,将车辆在实际航行中关于航行稳定性的有效样本数据作为补充添加到所述分类识别数据库中,重复步骤3,利用支持向量机进行分类识别确定新的超平面,并将结果应用到步骤4中高速下车辆的稳定性控制,以改进其控制效果,不断完成不同工况下高速车辆航行稳定性的控制调节。
69.本发明基于高速船舶水动力学,提供一种基于支持向量机分类识别的高速水陆两栖车的海豚运动稳定性控制的智能方法,根据目标两栖车及其压浪板模型建立其静水直航运动仿真模型;计算不同参数水平下的车辆运动稳定性状态以建立样本数据库;利用支持向量机分类方法,基于运动稳定性特征进行参数样本分类识别;使用分类超平面方程作为稳定性参数调节的依据,计算不同工况下压浪板下旋角的值;通过车辆稳定性控制模块指令压浪板装置进行相应的动作,实现高速航行过程中车辆稳定性的控制;并基于实际航行数据对样本数据库进行补充,改进控制模型。本发明提供了两栖车高速航态下海豚运动稳定性控制的智能方法,采用支持向量机分类技术,确保航行稳定性的同时,避免过度调节。解决了高速航态下确定两栖车海豚运动稳定性的参数临界值问题,为压浪板等装置适应不同航行工况的控制调节提供了指导,实现了两栖车的水上纵向运动稳定性的进一步优化,对于其航速的提高有重要意义。
70.以上所述仅是本发明的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰
也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1