一种基于机器视觉的地铁轨道障碍物检测系统及方法
1.本发明属于轨道交通中地铁安全领域,特别是一种基于机器视觉的地铁轨道障碍物检测系统及方法。
背景技术:
2.当前轨道交通在城市公共交通系统中扮演者重要的角色,随着城市轨道交通的快速发展,地铁是涵盖了城市地区各种地下与地上地路权专有、高密度、高运量地城市轨道交通系统。我国现已开通地铁里程达6000公里,作为城市人口出行的一种重要交通工具,其极大地缓解着城市地面交通的压力。因此,确保地铁列车的行驶安全不仅有助于维护地铁的正常运营,更对保障乘客的生命财产安全有着至关重要的作用。正常情况下,地铁轨道的完整性是可以保证的,造成轨道区域环境的不安全因素往往是位于轨道区域内(轨间和轨道)对列车行驶造成不良影响的障碍物。因此,实时检测地铁轨道障碍物是保障地铁行驶安全的必要手段与方法。鉴于地铁行驶环境的照明不充足、行驶空间狭小、列车行驶速度较快等特点,使得列车驾驶员很难对行驶前方可能出现的不明物体有所察觉并做出快速反应。
技术实现要素:
3.本发明的目的在于提供一种基于机器视觉的地铁轨道障碍物检测系统及方法,实现对地铁轨道障碍物的实时检测,以保障地铁列车的行驶安全。
4.实现本发明目的的技术解决方案为:
5.一种基于机器视觉的地铁轨道障碍物检测方法,包括以下步骤:
6.步骤1、采集地铁列车行驶实时图像:实时采集前方隧道环境视频图像帧序列;
7.步骤2、图像预处理:对摄像机采集到的实时视频帧图像序列进行处理,采用基于中值滤波和灰度直方图均衡化的图像预处理方法,得到降噪并细节增强的地铁列车前方隧道环境图像;
8.步骤3、识别直线轨道区域边界:对于处理后的实时图像,利用scharr边缘检测算子和canny边缘检测算子相结合的方法,检测图像中的轨道区域边缘,再通过hough直线变换求解直线轨道区域边缘直线,最终标识出图像中的轨道区域边缘;
9.步骤4:建立检测窗:根据步骤3识别出的直线轨道区域边缘,将障碍物的检测范围限定于该区域内;
10.步骤5:轨道障碍物检测:基于形态学变换的三帧间差分法,对轨道区域实时图像序列进行三帧差分运算,根据面积阈值t判断有无障碍物,并在实时图像中标识出障碍物。
11.一种基于机器视觉的地铁轨道障碍物检测系统,包括车载摄像机、车载显示器、图像预处理模块、直线轨道区域边界识别模块、检测窗建立模块、轨道障碍物检测模块;
12.所述车载摄像机用于采集列车行驶过程中的前方隧道环境视频图像;
13.所述图像预处理模块用于对摄像机采集到的实时视频帧图像序列进行处理,采用基于中值滤波和灰度直方图均衡化的图像预处理方法,得到降噪并细节增强的地铁列车前
方隧道环境图像;
14.所述直线轨道区域边界识别模块用于对预处理后的实时图像,利用scharr边缘检测算子和canny边缘检测算子相结合的方法,检测图像中的轨道区域边缘,再通过hough直线变换求解直线轨道区域边缘直线,最终标识出图像中的轨道区域边缘;
15.所述检测窗建立模块用于根据识别出的直线轨道区域边缘,将障碍物的检测范围限定于该区域内;
16.所述轨道障碍物检测模块用于基于形态学变换的三帧间差分法,对轨道区域实时图像序列进行三帧差分运算,根据面积阈值t判断有无障碍物,并在实时图像中标识出障碍物,最终将轨道区域识别结果与障碍物检测结果在车载显示器中实时标识并进行报警。
17.本发明与现有技术相比,其显著优点是:
18.由于本发明的图像与处理算法相对简单、算法计算复杂度低,单帧图像的处理时间较短,基本上可以实现实时快速处理列车行驶过程中的隧道环境图像;基于scharr边缘检测算子和canny边缘检测算子并结合了hough概率直线变换的轨道区域边界识别算法能够动态识别轨道区域边缘,同时具备较高的准确率;采用形态学变换的三帧间差分法进行轨道障碍物检测,有效改善了双帧间差分法检测出重叠障碍物的缺点,其对光线等场景变化也不敏感,能够较好的适应隧道内部场景变化,稳定性较双帧间差分法更好。本算法对轨道障碍物检测的准确度与实时性均较高。
附图说明
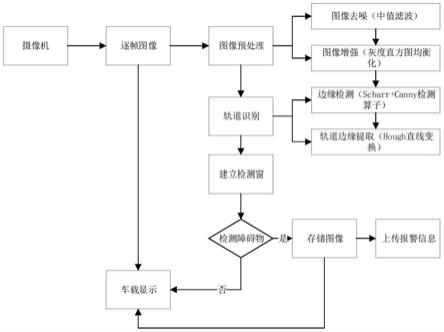
19.图1为本发明的检测系统工作流程图。
20.图2为本发明的图像预处理流程图。
21.图3为本发明的轨道区域边界识别流程图。
22.图4为本发明的形态学变换的三帧间差分算法框图。
具体实施方式
23.下面结合附图及具体实施例对本发明做进一步的介绍。
24.结合图1
‑
图4,一种基于机器视觉的地铁轨道障碍物检测系统,包括车载摄像机、车载显示器、图像预处理模块、直线轨道区域边界识别模块、检测窗建立模块、轨道障碍物检测模块;该系统通过安装在地铁列车驾驶室内正上方的车载摄像机获取列车行驶过程中实时隧道视频图像,经过中值滤波与灰度直方图均衡化的图像预处理后,对于直线轨道区域识别采用scharr边缘检测算子与canny边缘检测算子相结合的边缘检测方法,再利用hough直线变换对得到的边缘图像进行连接,得到轨道区域边界直线;基于形态学处理的三帧间差分法,对列车行驶过程中轨道全区域内的障碍物进行实时检测;最终将轨道区域识别结果与障碍物检测结果在车载显示器中实时标识并进行报警,以提示列车驾驶员,从而有效避免障碍物对列车行驶安全的影响。
25.根据上述的基于机器视觉的地铁轨道障碍物检测系统,包括以下步骤:
26.1.采集实时图像
27.通过安装在地铁列车驾驶室内正上方的摄像机获取实时视频图像,采用单目视觉方式、光学防抖、远焦距的数字摄像机,在地铁列车行驶过程中实时采集前方隧道环境视频
图像帧序列。本实施例中采用海康威视ds
‑
ipc
‑
b12
‑
i型网络数字摄像机,具有光学防抖、远焦距以及高分辨率的数字摄像机均可以应用。视频图像存储与处理设备为车载工控机:研华工控ark
‑
2250s。
28.2.图像预处理
29.参考图2,采用中值滤波与灰度直方图均衡化方法对采集到的图像进行预处理。首先,将采集到的视频帧图像进行灰度化。灰度化的目的在于将所采集的彩色转换为灰度图像,以减少处理的信息量。使用的灰度化计算公式为:gray=0.072169b+0.715160g+0.212671r(其中r、g、b分别代表像素点的红、绿、蓝三种颜色分量);
30.接着,对灰度图像采用中值滤波算法进行图像增强。目的在于抑制灰度图像中的点状噪声,增强灰度图像的边缘信息;
31.最后,使用灰度直方图均衡化方法平均灰度图像的灰度值分布,使得图像的细节更加清晰,增大图像中轨道线灰度值与两侧区域灰度值的区分度。
32.3.识别直线轨道区域边界
33.参考图3,实现对轨道区域边界的识别。首先,根据地铁列车实际行驶过程中轨道在视频图像中的方向和位置特点,以scharr边缘检测算子在垂直方向上的模板作为图像卷积计算的模板,求得灰度图像各像素点的纵向灰度梯度值,得到边缘梯度图像。再使用canny边缘检测算子优化边缘梯度图像;
34.接着,利用hough概率直线变换对scharr和canny边缘检测算子处理后的二值边缘图像进行边缘像素点连接,得到直线轨道区域边界直线;
35.最后,在原始图像中对识别出的直线轨道区域边界进行标识。
36.4.建立检测窗
37.根据识别出的直线轨道区域边界结果,将图像中所标识的两条边界直线作为障碍物检测的左右边界,同时以图像底部到图像2/3处高度作为检测窗的上下边界。
38.5.轨道障碍物检测
39.参考图4,采用经过形态学处理的三帧间差分法,对检测窗中的图像进行差分运算,提取通过对视频中连续且相邻的图像帧序列做差分运算,得到相邻图像帧中的不同像素点,根据该像素点构成的差分图像的面积阈值t判断是否存在检测目标。若面积大于设定阈值,则判断该像素点群为障碍物,反之,则判断为轨道背景,以此达到提取障碍物目标的目的。
40.鉴于实际情况,采用经过形态学处理的三帧间差分法实现障碍物检测的目标;形态学处理的三帧间差分算法如下所示:
41.设视频图像帧序列为f
k
,表示第k帧图像。f
k
‑1(x,y)、f
k
(x,y)、f
k+1
(x,y)表示视频序列中连续的三帧图像,即第k
‑
1、k、k+1帧;
42.对相邻的三帧图像f
k
‑1(x,y)、f
k
(x,y)、f
k+1
(x,y)进行灰度化处理,分别得到对应的灰度图像f
′
k
‑1(x,y)、f
′
k
(x,y)、f
′
k+1
(x,y);
43.d
k
‑
1,k
(x,y)=|f
′
k
(x,y)
‑
f
′
k
‑1(x,y)|
44.d
k,k+1
(x,y)=|f
′
k+1
(x,y)
‑
f
′
k
(x,y)|
45.d
i,j
(x,y)表示视频中连续两帧图像的灰度图像相减得到的二值差值图像,然后对d
k
‑
1,k
(x,y)和d
k,k+1
(x,y)做如下处理:
46.首先,对d
k
‑
1,k
(x,y)和d
k,k+1
(x,y)中对应的像素值做与运算,得到可能包含检测目标的二值图像b(x,y);
47.接着,对该二值图像b(x,y)进行形态学腐蚀处理,得到二值图像e(x,y),目的是去除像素点间微小的变化;
48.判断像素点是否为障碍物:
49.(t为设定的面积阈值,在实验环境测试得到)
50.r
k
(x,y)为判断像素点是否为目标障碍物的依据:若为1,则判定为障碍物;反之,判定为轨道背景;
51.最后,在原始图像中,对判定为障碍物的像素点区域进行标识。
52.本发明可以快速处理地铁列车行驶过程中实时视频帧序列图像,能够有效、准确的识别直线轨道区域边缘,同时对轨道区域内的障碍物也有较高的检测实时性与准确率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1