一种基于恒星星表的望远镜畸变校正方法
1.本发明属于天文学技术领域,具体为一种基于恒星星表的望远镜畸变校正方法。
背景技术:
2.光学望远镜一般分为折射式,反射式及折反式望远镜,无论哪种形式的望远镜都在其光路系统中用到透镜(凸透镜或凹面镜),而畸变是光学透镜固有的透视失真的总称,也就是因为透视原因造成的失真,这种失真对于物体的成像质量是非常不利的,但因为这是透镜的固有特性(凸透镜汇聚光线、凹透镜发散光线),所以无法消除,只能改善。
3.天文望远镜(astronomi ca l te l escope)是观测天体的重要工具,可以毫不夸张地说,没有望远镜的诞生和发展,就没有现代天文学。随着望远镜在各方面性能的改进和提高,天文学也正经历着巨大的飞跃,迅速推进着人类对宇宙的认识。空间碎片是人类航天活动产生的,但其因数量庞大已经对人类正常的航天活动造成了较大影响,因此需要对空间碎片实时监测,目前大部分监测任务还是由大量的天文望远镜来完成。由于要提高观测的效率且考虑节约成本,所以一般会建设很大数量的大视场小口径望远镜,该类望远镜由于口径小,视场大,其畸变效应会变得异常明显。虽然望远镜出场会测量畸变,但是望远镜探测器的安装调试过程中,以及望远镜的使用过程中,镜片都有可能会发生改变,而镜片发生微小的改变都会影响畸变,畸变对于空间目标测量,尤其是天文定位结果精度会产生比较大的影响。
技术实现要素:
4.本发明所要解决的技术问题是针对上述技术现状,提供一种利用星表和观测图像对望远镜的畸变进行实时测量,利用星图匹配的方法计算每一个恒星点目标的畸变,从而对望远镜的畸变模型进行求解修正,获取目标在探测器上的理论位置,从而提高望远镜的天文定位测量精度的方法。
5.本发明提供的技术方案为:
6.一种基于恒星星表的望远镜畸变校正方法,其特征在于,包括以下步骤:
7.步骤(1):初始化星表数据及星表索引数据,设置望远镜的参数;
8.步骤(2):读入望远镜观测图像处理结果数据,所述处理结果数据包含每个实测恒星的在观测图像中的坐标信息、图像灰度和望远镜指向信息;
9.步骤(3):利用步骤(1)和步骤(2)的数据进行精确指向和像旋的测定;
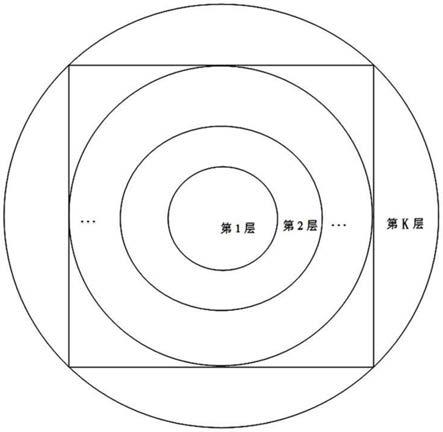
10.步骤(4):选择生长因子dr,通过多个以观测图像中心为圆心的同心圆,将望远镜的视场自内向外划分为第1圆层视场,第2环层视场,
…
,第k环层视场,k为大于1的整数;
11.设所述第1圆层视场,第2环层视场,
…
,第k环层视场范围内的实测恒星分别为m1颗,m2颗,
…
,m
k
颗;
12.步骤(5):利用步骤(3)测定的精确指向和像旋,重新搜索望远镜视场内的所有理论恒星,设重新搜索获得的理论恒星为n颗;
13.步骤(6):结合步骤(2)输入的图像处理结果数据和步骤(5)获得的理论恒星数据,利用生长法进行畸变模型参数的拟合,具体包括以下步骤:
14.步骤(6
‑
1):设所述1圆层视场范围内有m1颗实测恒星,将所述m1颗实测恒星与步骤(5)获得的n颗理论恒星进行匹配,设匹配成功的理论恒星及实测恒星组成的恒星匹配对为m21组;
15.步骤(6
‑
2):利用步骤(6
‑
1)获得的m21组恒星匹配对的坐标信息,对光学畸变模型公式进行最小二乘参数拟合,求解所述第1圆层视场的畸变模型参数,获得第一畸变模型;
16.所述光学畸变模型公式为:
[0017][0018]
其中:
[0019]
x、y分别为观测图像中目标测量位置的x轴、y轴坐标(以观测图像中心为坐标原点);
[0020]
δx、δy分别为目标测量位置在x轴、y轴上实测值与理论值的偏差;
[0021]
k1、k2、k3为径向畸变参数,p1、p2为切向畸变参数,r为目标测量位置与观测图像中心的距离(半径距离);
[0022]
步骤(6
‑
3):用步骤(6
‑
2)获得的第一畸变模型,对第2环层视场范围内的m2颗实测恒星进行畸变模型修正,获得修正后的m2颗实测恒星;
[0023]
步骤(6
‑
4):用步骤(6
‑
3)获得的修正后的m2颗实测恒星与步骤(5)获得的n颗理论恒星进行匹配,设本次匹配成功的理论恒星及实测恒星组成的恒星匹配对为m22组;
[0024]
步骤(6
‑
5):利用步骤(6
‑
3)获得的m22组恒星匹配对的坐标信息,对所述光学畸变模型公式进行最小二乘参数拟合,求解第2环层视场的畸变模型参数,获得第二畸变模型;
[0025]
步骤(6
‑
6):按照步骤(6
‑
3)至步骤(6
‑
5)的实施方式,对外侧环层视场依次进行畸变模型修正、恒星匹配和畸变模型拟合的过程,直到每一层视场的畸变模型都得到求解;
[0026]
即利用前一层视场畸变模型对当前层视场范围内实测恒星进行畸变模型修正,以修正后的实测恒星与理论恒星进行恒星匹配,再利用匹配的结果进行畸变模型拟合;
[0027]
步骤(7):对畸变模型进行整体求解,具体包括以下步骤:
[0028]
步骤(7
‑
1):用步骤(6)所获得的各层视场的畸变模型分别对对应层内原始实测恒星的位置进行修正,获得修正后的实测恒星m颗;
[0029]
步骤(7
‑
2):用步骤(7
‑
1)获得的修正后的m颗实测恒星和用步骤(5)获得的n颗理论恒星进行匹配,设本次匹配成功的理论恒星及实测恒星组成的恒星匹配对为mn组;
[0030]
步骤(7
‑
3):利用步骤(7
‑
2)获得的mn组恒星匹配对的坐标信息,对所述光学畸变模型公式进行最小二乘参数拟合,求解整个视场的畸变模型参数,获得整体视场的畸变模型。
[0031]
在上述方案的基础上,进一步改进或优选的方案还包括:
[0032]
进一步的,所述步骤(3)具体包括:
[0033]
步骤(3
‑
1):根据望远镜的指向和视场,搜索该视场内的所有理论恒星;
[0034]
步骤(3
‑
2):选取观测图像中心区域视场内的理论恒星和实测恒星用于中心指向测定;
[0035]
步骤(3
‑
3):对选取的中心区域视场内的理论恒星和图像实测恒星,按星等及灰度和进行降序排序,并按排序选取前n1颗理论恒星和前m1颗实测恒星分别生成理论星图数据和实测星图数据;
[0036]
步骤(3
‑
4):对步骤(3
‑
3)生成的理论星图数据和实测星图数据进行匹配,解算出步骤(2)给定的望远镜指向信息的偏移量,从而确定所述观测图像中心的精确指向,以及观测图像相对于选定坐标系的旋转角度,即像旋。
[0037]
作为优选,所述星标为gaia星表。
[0038]
作为优选,所述步骤(3
‑
2)中选取的观测图像中心区域视场为0.5
‑
1.5平方度视场。
[0039]
作为优选,所述步骤(3
‑
3)的理论星图数据和实测星图数据均采用三角星图数据,即步骤(3
‑
4)采用三角星图数据进行匹配。
[0040]
进一步的,在上述拟合过程中,匹配理论恒星及实测恒星时,剔除位置差异大于0.5个像素的残差恒星匹配对。
[0041]
本发明基于畸变中心对称分布,畸变随半径变大的特点设计了一种基于星表的生长法畸变拟合方法,主要原理是以望远镜光轴为中心将探测器靶面划分多个同心圆环,由最内侧的圆开始做恒星匹配和畸变拟合,然后用内测畸变拟合参数对相邻外侧数据进行修正,修正后的恒星和理论星表中恒星进行匹配,用匹配的结果对外侧的畸变进行迭代拟合,拟合中剔除可比较大的匹配残差恒星对,以此类推直到最外层恒星拟合完毕。本发明方法可有效的降低天文望远镜畸变对于空间目标测量,尤其是天文定位结果精度度的影响,且易于实施,适合推广使用。
附图说明
[0042]
图1为生长法畸变修正及恒星匹配示意图。
具体实施方式
[0043]
为了阐明本发明的技术方案和原理,下面结合附图与具体实施例对本发明做详细的说明。
[0044]
畸变是相对于望远镜主光轴中心对称分布的,中心畸变最小,物体距中心距离越大畸变越大。对于20度x20度视场,口径20cm的望远镜,其畸变可达到4%,用靶面4096x4096的探测器,其边缘畸变可以达到80个象元,约23角分的视场角,在23角分x23角分的视场内恒星数可达几百到几千颗恒星,因此如果不修正畸变是没有办法将理论恒星和实测恒星一一对应的。本实施例提供一种基于gaia星表的望远镜畸变校正方法,其实施过程为:
[0045]
步骤(1):初始化gaia星表数据,初始化gaia星表索引数据,设置望远镜焦距、视场、相机靶面大小、像元尺寸等参数。
[0046]
步骤(2):读入望远镜观测图像处理结果数据,该数据由其他图像处理软件处理完成,所述处理结果数据包含每个实测恒星的在观测图像中的坐标信息(x,y)、灰度、像素数和信噪比等信息,还包括图像拍摄的具体时刻、曝光时间长度及望远镜指向信息。
[0047]
步骤(3):利用步骤(1)和步骤(2)的数据进行精确的指向和像旋的测定,具体包括以下步骤:
[0048]
步骤(3
‑
1):根据望远镜的指向和视场,搜索该视场内的所有理论恒星;
[0049]
步骤(3
‑
2):选取观测图像中心区域1平方度视场内的理论恒星和实测恒星(因中心区域畸变较小,边缘畸变大概为70角秒,只有几个像素,在匹配门限以内),用于中心指向测定;
[0050]
步骤(3
‑
3):对选取的1平方度视场内的理论恒星按星等进行降序排序,对选取的1平方度视场内的图像实测恒星按灰度和进行降序排序,选取前n1颗理论恒星和前m1颗实测恒星分别生成理论三角星图数据和实测三角星图数据;
[0051]
步骤(3
‑
4):对步骤(3
‑
3)生成的理论三角星图数据和实测三角星图数据进行匹配,解算出步骤(2)给定的望远镜指向信息的偏移量,从而确定所述观测图像中心的精确指向,以及观测图像相对于选定坐标系的旋转角度,即像旋。
[0052]
步骤(4):选择合适的生长因子dr(一般可选取0.1度),通过多个以观测图像中心为圆心的同心圆,将望远镜的视场自内向外划分为第1圆层视场,第2环层视场,
…
,第k环层视场,k为大于1的整数,如图1所示,并设所述第1圆层视场,第2环层视场,
…
,第k环层视场范围内的实测恒星分别为m1颗,m2颗,
…
,m
k
颗。
[0053]
步骤(5):利用步骤(3
‑
4)测定的精确中心指向和像旋,重新搜索望远镜视场内的所有理论恒星,设重新搜索获得的理论恒星为n颗。
[0054]
步骤(6):结合步骤(2)输入的图像处理结果数据和步骤(5)获得的理论恒星数据,利用生长法进行畸变模型参数的拟合,具体包括以下步骤:
[0055]
步骤(6
‑
1):设所述1圆层视场(即最中心圆形视场)范围内有m1颗实测恒星,将所述m1颗实测恒星与步骤(5)获得的n颗理论恒星进行匹配,设匹配成功的理论恒星及实测恒星组成的恒星匹配对为m21组;
[0056]
步骤(6
‑
2):利用步骤(6
‑
1)获得的m21组恒星匹配对的坐标信息,对光学畸变模型公式进行最小二乘参数拟合,求解所述第1圆层视场的畸变模型参数,获得第一畸变模型;
[0057]
所述光学畸变模型公式为:
[0058][0059]
其中:
[0060]
x、y分别为观测图像中目标测量位置的x轴、y轴坐标(以观测图像中心为坐标原点);
[0061]
δx、δy分别为目标测量位置在x轴、y轴上实测值与理论值的偏差;
[0062]
k1、k2、k3为径向畸变参数,p1、p2为切向畸变参数,r为目标测量位置与观测图像中心的距离(半径距离);
[0063]
步骤(6
‑
3):用步骤(6
‑
2)获得的第一畸变模型,对第2环层视场范围内的m2颗实测恒星进行畸变模型修正,获得修正后的m2颗实测恒星;
[0064]
步骤(6
‑
4):用步骤(6
‑
3)获得的修正后的m2颗实测恒星与步骤(5)获得的n颗理论
恒星进行匹配,设本次匹配成功的理论恒星及实测恒星组成的恒星匹配对为m22组;
[0065]
步骤(6
‑
5):利用步骤(6
‑
3)获得的m22组恒星匹配对的坐标信息,对所述光学畸变模型公式进行最小二乘参数拟合,求解第2环层视场的畸变模型参数,获得第二畸变模型;
[0066]
步骤(6
‑
6):按照步骤(6
‑
3)至步骤(6
‑
5)的过程,再对第3环层至第k环层视场依次进行畸变模型修正、恒星匹配和畸变模型拟合的过程,直到每一层视场的畸变模型都得到求解。
[0067]
步骤(7):对畸变模型进行整体求解,具体包括以下步骤:
[0068]
步骤(7
‑
1):用步骤(6)所获得的各层视场的畸变模型分别对对应层内分布的原始实测恒星(步骤(2)获得的实测恒星)的位置进行修正,获得修正后的实测恒星m颗;
[0069]
步骤(7
‑
2):用步骤(7
‑
1)获得的修正后的m颗实测恒星和用步骤(5)获得的n颗理论恒星进行匹配,设本次匹配成功的理论恒星及实测恒星组成的恒星匹配对为mn组;
[0070]
步骤(7
‑
3):利用步骤(7
‑
2)获得的mn组恒星匹配对的坐标信息,对所述光学畸变模型公式进行最小二乘参数拟合,求解整个视场的畸变模型参数,获得整体视场的畸变模型。
[0071]
之后,在望远镜的使用过程中,即可利用所述整体视场的畸变模型对望远镜观测图像中的实测恒星位置进行修正,完成与理论恒星的精确匹配。
[0072]
上述拟合过程中,在每次匹配恒星匹配对时,可剔除比较大(实测恒星和理论恒星位置差异大于0.5个像素大小)的残差恒星匹配对,以提高拟合精度。
[0073]
本发明方法适用于视场超过10度的大视场望远镜,步骤(3
‑
2)中可以取的观测图像中心区域视场为0.5
‑
1.5度。
[0074]
本发明方法基于恒星星表实现,所述恒星星表也可以是依巴谷星表、第谷星表、fk5星表等其它星表,但gaia星表是gaia卫星最新观测数据,是当前数据量最多,测光精度最高的恒星星表,为优选星表。同时,本发明方法可应用的星图除了三角形星图,还有四边形星图,基于主星的矢量星图等,其中,三角形星图是最简单易操作的,可以对星图根据一个特征值进行排序加快匹配速度。
[0075]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进。本发明要求保护范围由所附的权利要求书、说明书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1