一种过热熔接熔点视觉识别检测方法与流程
1.本发明属于光伏单晶拉制生产技术领域,尤其是涉及一种过热熔接熔点视觉识别检测方法。
背景技术:
2.当前进入引晶工序前需要检测是否有引晶特征的出现,在过热熔接过程中,当硅溶液的液面温度达到熔接温度时,自动降籽晶,将籽晶降至硅溶液的液面处,并将籽晶定位至原生籽晶处,籽晶与硅溶液的液面接触。
3.当前稳温工艺中引晶前期没有熔接熔点,温度偏高,容易造成引晶引断,且无法统一引晶一致性,操作人员无法直观的观测在进入引晶工序前期是否出现引晶特征,且无法直观识别熔接熔点的大小,不能直接发出引晶信号进行操作提示,导致工作效率低下;况且由于人工误差的影响,不能保证进入引晶工序的一致性,可能造成资源的浪费。
技术实现要素:
4.本发明要解决的问题是提供一种过热熔接熔点视觉识别检测方法,适用于进入引晶工序前引晶特征的视觉判断。
5.为解决上述技术问题,本发明采用的技术方案是:一种过热熔接熔点视觉识别检测方法,步骤为:
6.s1:建立深度学习模型;
7.s2:通过视觉系统定角度捕捉熔接过程图像;
8.s3:将所述熔接过程图像传输至所述深度学习模型;
9.s4:通过所述深度学习模型对所述熔接过程图像进行引晶特征检测与逻辑判断,输出识别结果。
10.进一步的,所述s1中:获取从过热熔接过程开始到引晶结束过程中每一单晶炉中每个籽晶上熔接熔点数量的基础源数据;
11.对获取的所述源数据进行处理,将所述源数据作为素材构建所述深度学习模型,并进行所述深度学习模型的训练实现迭代优化。
12.进一步的,所述s2前,还需要通过所述视觉系统四点追踪捕捉熔点图像;
13.将所述熔点图像传输至所述深度学习模型;
14.通过所述深度学习模型对所述熔点图像进行所述熔接熔点检测与逻辑判断,输出识别结果。
15.进一步的,所述视觉系统正对所述籽晶设置,所述籽晶每逆时针旋转90度所述视觉系统捕捉一张所述熔点图像;所述视觉系统捕捉所述籽晶旋转一周的所述熔点图像。
16.进一步的,所述熔点图像通过ccd程序发送至所述深度学习模型。
17.进一步的,所述深度学习模型根据检测到每张所述熔点图像中是否存在清晰可见的所述熔接熔点,进行结果输出;
18.当所述熔接熔点存在且为一个时,进入引晶特征判断工序;
19.当所述熔接熔点不存在或者所述熔点的个数大于一个时,触发变晶报警提示,进行籽晶的处理。
20.进一步的,所述s2中:捕捉所述熔接过程图像从过热完成后开始到进入引晶状态结束;
21.所述视觉系统正对所述籽晶设置,所述视觉系统每秒捕捉一张所述熔接过程图像,所述视觉系统捕捉扇形视野中正对所述视觉系统的区域面积内的熔接小白点的数量。
22.进一步的,所述s3中:所述熔接过程图像通过ccd程序发送至所述深度学习模型。
23.进一步的,所述s4中:
24.所述深度学习模型将所述熔接小白点的数量转换为所述熔接过程图像中的所述区域面积内所述熔接小白点的像素点的数量;
25.所述深度学习模型根据检测到的所述熔接过程图像中所述区域面积内所述熔接小白点的数量是否满足所述深度学习模型中的阈值,进行结果输出。
26.进一步的,所述阈值为所述区域面积中包含40-80个像素点,当所述熔接小白点的像素点的数量满足所述阈值时,进入引晶工序;
27.当所述熔接小白点的像素点的数量不满足所述阈值时,不进入所述引晶工序。
28.由于采用上述技术方案,具有以下优点:
29.1.通过开发视觉系统识别熔点大小,识别熔点像素值直接进行引晶信号输出,处理器通过视觉信号来执行引晶工艺达到引晶的一致性,提高了工作人员的工作效率,进一步提高了生产效率,提高了企业竞争力。
30.2.不需要人工判定籽晶过热熔接过程中熔接熔点的状态,实现了自动化工业化生产,避免了由于人工经验不足导致的工时浪费以及异常事故的发生,使得操作过程中安全性更高。
31.3.通过机器视角代替人工视角来判断,提高引晶前籽晶一致性,节约人力与工时;
32.4.可实现实时监测籽晶状态,及时识别异常籽晶,提高单晶制造效率。
附图说明
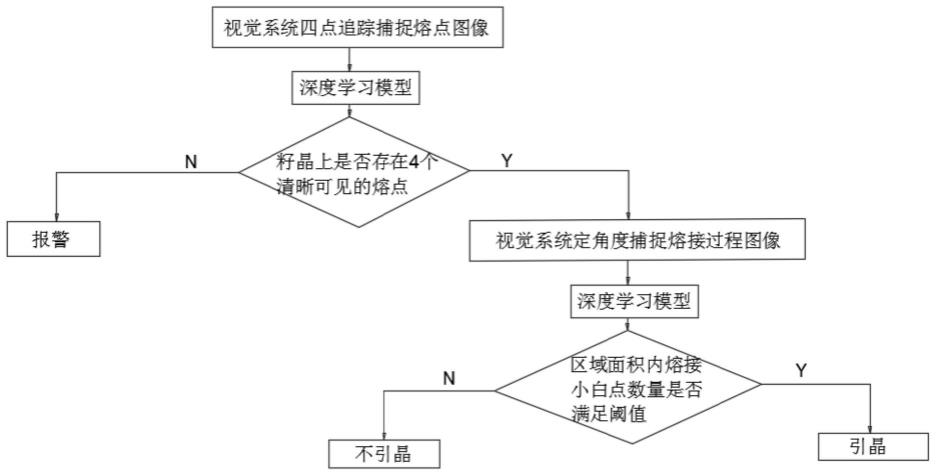
33.图1是本发明一种实施例的流程框线图;
34.图2是本发明一种实施例中视觉系统捕捉视野示意图。
35.图中:
36.1、籽晶2、矩形区域
具体实施方式
37.下面结合实施例和附图对本发明作进一步说明:
38.在本发明的一种实施例中,如图1所示,一种过热熔接熔点视觉识别检测方法,其检测方法为:
39.s1:建立深度学习模型,通过深度学习对每个籽晶的从过热熔接过程开始到引晶结束过程的熔接熔点数量建立深度学习模型,具体包括以下步骤:
40.s11:获取从过热熔接过程开始到引晶结束过程中每一单晶炉中每个籽晶上熔接
熔点数量的基础源数据;
41.s12:对获取的熔接熔点的源数据进行处理,将源数据作为素材构建深度学习模型,并进行深度学习模型的训练实现迭代优化;
42.其中该深度学习模型建立在处理器上,对于该基础源数据的获取同样需要基于处理器上的视觉系统,通过视觉系统采集和捕捉大量的籽晶1上的熔接熔点的图像,构建熔接熔点的数据库,从而构建深度学习模型,在对过热熔接熔点进行视觉识别检测之前,还需要对该深度学习模型进行模拟训练和试运行,不断对深度学习模型进行迭代优化。
43.s2:通过视觉系统四点追踪捕捉熔点图像:具体为,视觉系统正对籽晶设置,籽晶每逆时针旋转90度视觉系统捕捉一张熔点图像;视觉系统捕捉籽晶旋转一周的熔点图像。
44.其中,视觉系统设置在服务器上,其具体的,视觉系统可以但并不限定为工业相机。视觉系统正对籽晶并设置在籽晶1的一侧,本实施例中,取视觉系统设置在正前方,即视觉系统正对图中中间箭头位置设置,先捕捉正对视觉系统一点的熔点图像,籽晶每旋转90度,视觉系统捕捉一张熔点图像,籽晶逆时针旋转,即视觉系统在籽晶1逆时针旋转一周的过程中共捕捉4张共计四个点的熔点图像。
45.s3:将熔点图像传输至深度学习模型,具体为:熔点图像通过ccd程序发送至深度学习模型,ccd程序每秒向深度学习模型发送一张熔点图像,其中,ccd程序用于实时传输图像。
46.s4:通过深度学习模型对熔点图像进行熔接熔点检测与逻辑判断,输出识别结果,具体为:深度学习模型根据检测到每张熔点图像中是否存在清晰可见的熔接熔点,进行结果输出;
47.当熔接熔点存在且为一个时,进入引晶特征判断工序;
48.当熔接熔点不存在或者所述熔点的个数大于一个时,触发变晶报警提示,进行籽晶的处理。
49.变晶报警装置同样设置于处理器上,通过四点追踪判断籽晶是否存在变晶情况的发生,其中变晶即晶体结构出现异常,表现出来即为多个熔点或者熔点不存在,其中,四点追踪是判断进入引晶的一个先决条件,当籽晶1在旋转过程中进入视觉系统的视野范围即进行定向追踪,直至旋转到正对视觉系统开始捕捉;必须保证籽晶在旋转一周的过程中籽晶上有四个清晰可见的熔接熔点,且四个熔接熔点的大小和形态均一致,采用四点追踪事先过滤是否符合引晶条件,存在异常不进行引晶操作,输出报警提示进行籽晶的处理。
50.当熔接熔点存在且为一个时,继续引晶特征判断,具体为:
51.s5:通过视觉系统定角度捕捉熔接过程图像,具体包括以下步骤:视觉系统正对籽晶设置,视觉系统每秒捕捉一张熔接过程图像,视觉系统捕捉扇形视野中正对视觉系统的区域面积内的熔接小白点的数量;该视觉系统捕捉熔接过程图像的过程从过热熔接完成后开始,进入引晶状态结束。
52.同样,视觉系统的设定位置不变,视觉系统正对籽晶1并设置在籽晶1的一侧,本实施例中,取视觉系统设置在正前方,即视觉系统正对图2所示中间箭头位置设置,其中定角度即为选定区域捕捉,视觉系统的可追踪的视野范围为扇形,如图2所示中,两侧箭头限定的扇形视野范围即视觉系统可追踪的视野范围,视觉系统在可见的扇形区域内见到熔点就开始追踪,直到正前方区域面积内检测熔接小白点的数量达到设定阈值,其中,熔接小白点
为清晰稳定状态的熔接熔点,区域内熔接小白点的个数是判断是否可以进入引晶工艺的条件;在本实施例中,区域面积取正对视觉系统的矩形区域,该矩形区域的大小可容纳熔接小白点的数量为40-80个,其中籽晶6s完成一周旋转,视觉系统在籽晶旋转过程中不断捕捉熔接过程图像,直到正前方区域面积内检测熔接小白点的数量达到设定阈值。
53.s6:将熔接过程图像传输至深度学习模型,具体为:熔接过程图像通过ccd程序发送至深度学习模型,ccd程序每秒向深度学习模型发送一张熔接过程图像,ccd程序用于实时传输图像。
54.s7:通过深度学习模型对熔接过程图像进行引晶特征检测与逻辑判断,输出识别结果,具体为:
55.s71:深度学习模型识别将熔接小白点的数量转换为熔接过程图像中的区域面积内熔接小白点的像素点的数量;
56.s72:深度学习模型根据检测到的熔接过程图像中区域面积内熔接小白点的数量是否满足深度学习模型中的阈值,进行结果输出。
57.其中阈值设定为区域面积中包含40-80个像素点,当熔接小白点的像素点的数量满足阈值时,进入引晶工序;
58.当熔接小白点的像素点的数量不满足阈值时,不进入引晶工序。
59.本实施例中,设定该区域为矩形方框中,设定矩形区域2中熔接小白点的个数为40-80个像素点,在通过视觉系统在捕捉过程中不断捕捉图像,每张熔接过程图像中捕捉矩形方框中熔接小白点的像素点的数量,满足设定阈值,直接发出引晶信号,进入到引晶工序,通过开发视觉系统识别熔点大小,识别熔点像素值直接进行引晶信号输出,处理器通过视觉信号来执行引晶工艺达到引晶的一致性,提高工作效率和生产效率。
60.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1