一种计算机视觉识别装置
1.本发明涉及计算机视觉领域,更具体的说是一种计算机视觉识别装置。
背景技术:
2.计算机视觉中的手势识别是一种通过数学算法来识别人体手势的技术,使用摄像头的传感器对人手进行三维成像,从而可对手势进行识别。专利号为202021916493.0公开的一种自动化计算机视觉识别装置,该实用新型公开了一种自动化计算机视觉识别装置,涉及计算机视觉识别技术领域,包括箱体,箱体的一侧固定安装有固定台,固定台的中部转动连接有识别摄像头,该实用新型,通过设置有固定柱、卡接柱以及固定箱,操作人员拉动固定柱带动卡接柱在固定箱内腔滑动,卡接柱的底端与卡接槽脱离卡接,推力弹簧推动固定板移动,固定板移动到适宜操作人员维修的位置,操作人员松开提手,固定弹簧推动卡接柱沿着固定箱内腔向下滑动,卡接柱的底端伸入至卡接槽内部,将固定板固定住,操作人员能够方便的对接收模块、处理模块以及显示输出模块进行维修,提高了操作人员的使用体验。但是该专利无法通过手掌件和橡胶指结组成多种手势供计算机视觉识别。
技术实现要素:
3.为克服现有技术的不足,本发明提供一种计算机视觉识别装置,其有益效果为本发明可以通过手掌件和橡胶指结组成多种手势供计算机视觉识别。
4.一种计算机视觉识别装置,包括手掌件和橡胶指结,所述手掌件上设有五个对应橡胶指结的孔,五个橡胶指结均插接在手掌件上。
5.一种计算机视觉识别装置还包括转动指结、转轴和套件,每个橡胶指结的上部均插接有套件,每个套件上均通过转轴铰接有转动指结,转轴上套接有橡胶套。
6.一种计算机视觉识别装置还包括插座,手掌件的下部插接在插座上。
7.一种计算机视觉识别装置还包括圆座、外伸件和拉伸弹簧,圆座的外周呈环形设有四个外伸件,四个外伸件上均连接有拉伸弹簧,四个拉伸弹簧的另一端分别连接在插座的四周。
8.一种计算机视觉识别装置还包括电机i和滑动件,滑动件上固定连接有电机i,电机i的输出轴的上部固定连接在圆座的下侧中心。
9.所述滑动件以及滑动件上侧的零件均左右各设有一个。
10.一种计算机视觉识别装置还包括凸柱、t形架、前伸杆、长孔、杠杆和电机ii,t形架上左右各设有一个前伸杆,两个滑动件分别滑动连接在两个前伸杆上,t形架的中部设有电机ii,电机ii的输出轴设在杠杆的中部,杠杆的左右两部均设有长孔,两个滑动件的下侧均设有凸柱,两个凸柱分别滑动连接在两个长孔上。
11.一种计算机视觉识别装置还包括伸缩杆i和滑移件,t形架的左右两端均滑动连接有滑移件,两个前伸杆的后部分别设在两个滑移件的前侧,t形架的中部设有两个伸缩杆i,两个伸缩杆i的外端分别设在两个滑移件上。
12.一种计算机视觉识别装置还包括十字底架和支撑板,t形架的下侧设有支撑板,支撑板的下部设有十字底架。
13.一种计算机视觉识别装置还包括立杆和摄像头安置板,十字底架的前部设有立杆,立杆的上部设有摄像头安置板。
14.本发明一种计算机视觉识别装置的有益效果是:
15.本发明可以通过手掌件和橡胶指结组成多种手势供计算机视觉识别。
附图说明
16.下面结合附图和具体实施方法对本发明做进一步详细的说明。
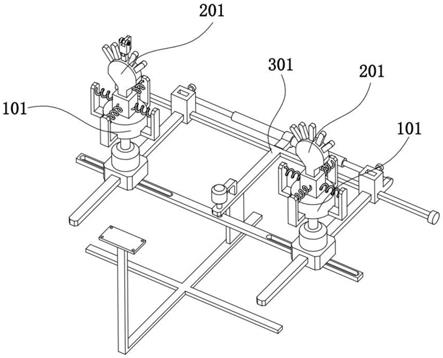
17.图1为计算机视觉识别装置的结构示意图一;
18.图2为计算机视觉识别装置的结构示意图二;
19.图3为计算机视觉识别装置的结构示意图三;
20.图4为计算机视觉识别装置的结构示意图四;
21.图5为计算机视觉识别装置的结构示意图五;
22.图6为圆座和手掌件的结构示意图一;
23.图7为圆座和手掌件的结构示意图二;
24.图8为t形架的结构示意图;
25.图9为圆环的结构示意图一;
26.图10为圆环的结构示意图二;
27.图11为弧形挡板的结构示意图;
28.图12为十字底架的结构示意图。
29.图中:圆座101;电机i102;滑动件103;外伸件104;拉伸弹簧105;插座106;凸柱107;
30.手掌件201;橡胶指结202;转动指结203;转轴204;套件205;
31.t形架301;伸缩杆i302;滑移件303;前伸杆304;长孔305;杠杆306;电机ii307;
32.圆环401;弹性板402;竖滑杆403;凸座404;伸缩杆ii405;电机iii406;l形架407;横梁杆408;
33.弧形挡板501;空槽502;挡头503;挡块504;压缩弹簧505;
34.十字底架601;立杆602;摄像头安置板603;支撑板604。
具体实施方式
35.请参阅图1
‑
7,是本发明提供的一种实施例,该实施例解决的主要技术问题是根据需要插入不同个数的橡胶指结202形成手势供计算机识别,测试计算机的手势识别能力,进一步地,
36.由于计算机视觉识别装置包括手掌件201和橡胶指结202,手掌件201上设置有五个对应橡胶指结202的孔,分别用来插入五个橡胶指结202,五个橡胶指结202模拟人的手指,进而根据需要插入不同个数的橡胶指结202形成手势供计算机识别,测试计算机的手势识别能力。
37.请参阅图1
‑
7,是本发明提供的一种实施例,该实施例解决的主要技术问题是提供
更多的手势供计算机识别,测试计算机对多种的手势的识别能力,进一步地,
38.由于计算机视觉识别装置还包括转动指结203、转轴204和套件205,每个橡胶指结202的上部均套接有套件205,套件205在转动指结203和橡胶指结202之间起到了连接的作用,转动指结203可以通过转轴204在橡胶指结202上转动,进而模拟人的手指的关节位置,进而完成更多手势的手动设置,提供更多的手势供计算机识别,测试计算机对多种的手势的识别能力。由于转轴204上套接有橡胶套,进而增大转动指结203和橡胶指结202之间的摩擦力,使得转动指结203和橡胶指结202的角度调节好后二者的相对位置可以进行固定。
39.请参阅图6,是本发明提供的一种实施例,该实施例解决的主要技术问题是使得手掌件201可以直立起来供计算机识别,进一步地,
40.由于计算机视觉识别装置还包括插座106,手掌件201的下部插在插座106上,插座106对手掌件201起到了支撑的作用,使得手掌件201可以直立起来供计算机识别。
41.请参阅图6
‑
7,是本发明提供的一种实施例,该实施例解决的主要技术问题是在手势不断抖动的情况下测试计算机的手势识别效果,进一步地,
42.由于计算机视觉识别装置还包括圆座101、外伸件104和拉伸弹簧105,圆座101的外周设置有四个外伸件104,四个外伸件104上均设置有拉伸弹簧105,四个拉伸弹簧105的另一端分别连接在插座106的四周,进而这时插座106是通四个拉伸弹簧105的拉扯进行支撑的,四个拉伸弹簧105对插座106的支撑不够稳定,进而使得插座106容易发生晃动,进而使得手掌件201和橡胶指结202也容易晃动,在现实中人的手的位置不是固定的,进而模拟动态的人手,在手势不断抖动的情况下测试计算机的手势识别效果。
43.请参阅图1
‑
7,是本发明提供的一种实施例,该实施例解决的主要技术问题是在手势转动的情况下识别手势,测试更多情况下的手势识别效果,进一步地,
44.由于计算机视觉识别装置还包括电机i102和滑动件103,滑动件103上设置有电机i102,电机i102的输出轴上固定连接在圆座101上,进而通过电机i102可以带动滑动件103以电机i102输出轴的轴线为轴转动,进而驱动手掌件201和橡胶指结202以电机i102输出轴的轴线为轴转动,改变手势的转动位置,在手势转动的情况下识别手势,测试更多情况下的手势识别效果。
45.请参阅图1
‑
8,是本发明提供的一种实施例,该实施例解决的主要技术问题是使得计算机识别人的双手手势,进一步地,
46.滑动件103以及滑动件103上侧的零件均左右各设置有一个,进而模拟人的双手的手势,使得计算机识别人的双手手势。
47.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是使得两个手势等距离反向移动,在这种情况下测试计算机识别手势的效果,进一步地,
48.由于计算机视觉识别装置还包括凸柱107、t形架301、前伸杆304、长孔305、杠杆306和电机ii307,t形架301上左右各设置有一个前伸杆304,两个前伸杆304上均滑动连接有滑动件103,t形架301的中部设置有电机ii307,电机ii307的输出轴固定连接在杠杆306的中部,电机ii307转动时可以带动杠杆306转动,杠杆306的左右两端均设置有长孔305,两个滑动件103的下侧的凸柱107分别滑动连接在两个长孔305上,进而电机ii307带动杠杆306转动时带动两个凸柱107等距离反方向移动,进而带动两个滑动件103分别在两个前伸杆304上等距离反向移动,进而使得两个手势等距离反向移动,在这种情况下测试计算机识
别手势的效果。
49.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是在两个手处于不同的间距的情况下测试计算机识别手势的效果,进一步地,
50.由于计算机视觉识别装置还包括伸缩杆i302和滑移件303,t形架301的两端均滑动连接有滑移件303,两个前伸杆304的后部分别连接在两个滑移件303的前侧,t形架301的中部设置有两个伸缩杆i302,两个伸缩杆i302伸缩端分别固定连接在两个滑移件303上。进而通过两个伸缩杆i302的伸缩可以分别带动两个滑移件303在t形架301上左右移动,进而带动两个前伸杆304左右移动,两个前伸杆304左右移动时可以带动两个滑动件103的左右位置,进而改变两个手掌件201之间的间距,在两个手处于不同的间距的情况下测试计算机识别手势的效果。
51.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是十字底架601和支撑板604均用来支撑t形架301,进一步地,
52.由于计算机视觉识别装置还包括十字底架601和支撑板604,t形架301的下侧设置有支撑板604,支撑板604的下部设置有十字底架601。十字底架601和支撑板604均用来支撑t形架301。
53.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是摄像头安置板603上用来安置用来计算机视觉识别的摄像头,进一步地,
54.由于计算机视觉识别装置还包括立杆602和摄像头安置板603,十字底架601的前部设置有立杆602,立杆602的上部设置有摄像头安置板603,摄像头安置板603上用来安置用来计算机视觉识别的摄像头。
55.所述计算机视觉识别装置还包括圆环401、电机iii406、l形架407、横梁杆408和弧形挡板501,l形架407的下部插接在滑移件303上,l形架407的上部固定连接有电机iii406,圆环401的上侧固定连接有横梁杆408,电机iii406的输出轴固定连接在横梁杆408的中部,圆环401下侧边缘设置有弧形挡板501。
56.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是随机对手势进行阻挡的情况下测试计算机手势视觉识别的效果,进一步地,
57.电机iii406转动时带动横梁杆408和圆环401以电机iii406输出轴的轴线为轴转动,进而带动弧形挡板501以电机iii406输出轴的轴线为轴转动,由于弧形挡板501始终位于手掌件201的四周的某一个位置,进而弧形挡板501以电机iii406输出轴的轴线为轴转动时会有时对手势进行阻挡,在随机对手势进行阻挡的情况下测试计算机手势视觉识别的效果。
58.所述计算机视觉识别装置还包括空槽502、挡头503、挡块504和压缩弹簧505,弧形挡板501上设置有空槽502,挡块504竖向滑动连接在空槽502处,挡块504的上侧与弧形挡板501的上部之间设置有压缩弹簧505,弧形挡板501的下侧固定连接有两个挡头503。
59.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是在随机对手势的上下位置进行阻挡的情况下测试计算机手势视觉识别的效果,进一步地,
60.压缩弹簧505始终给挡块504向下的力,使得挡块504始终有向下移动的趋势,挡头503防止挡块504脱离弧形挡板501,挡块504在空槽502上竖向滑动时可以随机对手势的上下位置进行阻挡,进而在随机对手势的上下位置进行阻挡的情况下测试计算机手势视觉识
别的效果。
61.所述计算机视觉识别装置还包括弹性板402、竖滑杆403、凸座404和伸缩杆ii405,圆环401上固定连接有凸座404,凸座404位于弧形挡板501处,凸座404竖向滑动连接有竖滑杆403,竖滑杆403的下侧固定连接有弹性板402,凸座404上固定连接有伸缩杆ii405,伸缩杆ii405的上部固定连接在竖滑杆403的上部,弹性板402能够移动至挡块504的下侧。
62.请参阅图1
‑
12,是本发明提供的一种实施例,该实施例解决的主要技术问题是实现在随机对手势的上下位置进行阻挡的情况下测试计算机手势视觉识别的效果,进一步地,
63.伸缩杆ii405伸缩时带动竖滑杆403和弹性板402竖向滑动,当弹性板402移动至挡块504的下侧时,弹性板402上升将挡块504抬起,使得挡块504相对弧形挡板501向上移动,这时压缩弹簧505被压缩,当弹性板402承受不住压缩弹簧505的弹力时,挡块504迅速在空槽502上向下弹射,进而实现挡块504随机在空槽502处竖向滑动,实现在随机对手势的上下位置进行阻挡的情况下测试计算机手势视觉识别的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1