载片台平整度的调节方法及装置与流程
1.本发明涉及光学检测领域,尤其涉及一种载片台平整度的调节方法及装置。
背景技术:
2.近年来,显示技术快速发展,对显示面板的要求也越来越高。然而,现有的显示面板的制造技术,无法完全避免显示缺陷的发生,因此在tft、ltps、am-oled等多种显示面板的制程中,需要对显示面板进行光学检测,如检查面板是否存在色不均(mura)、亮暗点等缺陷。
3.随着智能化制造技术的发展,自动光学检测(automatic optic inspection,简称aoi)在显示面板的生产检测环节日益广泛使用。自动光学检测采用无人化自动检测的方式,检测速度快、性能稳定、可调控性好,成为替代人工检测的主要检测模式。
4.目前,在面板自动光学检测设备中,出于成本考虑,进行全检扫描的探头一般不配备自动聚焦传感器,那么为了保证全检探头的聚焦清晰度,必须保证面板在机台内部的平面度水平不能超过全检镜头的景深。而在检测设备中,一般采用载片台对面板进行承载,在载片台上会有多个支撑面板的支撑柱(support pin),面板的平面度主要通过人工手动调节这些支撑柱的高度来保证,因数量众多且调节准确性要求较高,因此调平工作往往耗费很长的时间;且在一些情况下,即使确定了所述支撑柱的调节区域,但是支撑柱的调节方向错误,也导致面板的调节效率较低。
技术实现要素:
5.本发明实施例解决的问题是提供载片台平整度的调节方法及装置,提升待承载物的平面度。
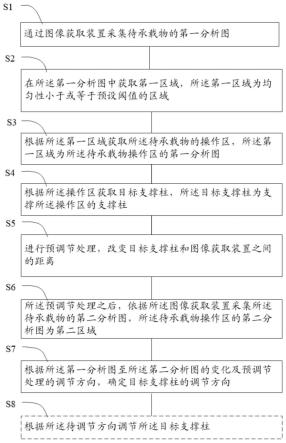
6.为解决上述问题,本发明实施例提供一种载片台平整度的调节方法,所述载片台包括多个支撑柱,所述支撑柱用于承载待承载物,所述调节方法包括:通过图像获取装置采集待承载物的第一分析图;在所述第一分析图中获取第一区域,所述第一区域为均匀性小于或等于预设阈值的区域;根据所述第一区域获取所述待承载物的操作区,所述第一区域为所述待承载物操作区的第一分析图;根据所述操作区获取目标支撑柱,所述目标支撑柱为支撑所述操作区的支撑柱;进行预调节处理,改变目标支撑柱和图像获取装置之间的距离;所述预调节处理之后,依据所述图像获取装置采集所述待承载物的第二分析图,所述待承载物操作区的第二分析图为第二区域;根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向。
7.本发明实施例还提供一种载片台平整度的调节装置,包括:载片台,包括多个支撑柱,所述支撑柱用于承载待承载物;图像获取装置,用于采集所述图像获取装置与待承载物的间距不同时所述待承载物的图像;处理单元,用于依据所述图像获取装置采集的所述待承载物的第一分析图,用于在所述第一分析图中获取第一区域,所述第一区域为均匀性小于或等于预设阈值的区域;用于根据所述第一区域获取所述待承载物的操作区,所述第一
区域为所述待承载物操作区的第一分析图;用于根据所述第一区域获取所述待承载物的操作区,所述第一区域为所述待承载物操作区的第一分析图;用于根据所述操作区获取目标支撑柱;用于依据所述图像获取装置采集所述待承载物的第二分析图,所述待承载物操作区的第二分析图为第二区域;分析单元,用于根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向;调节单元,用于进行预调节处理,改变目标支撑柱和图像获取装置之间的距离;用于根据分析单元确定的调节方向调节所述目标支撑柱。
8.与现有技术相比,本发明实施例的技术方案具有以下优点:
9.本发明实施例所提供的载片台平整度的调节方法中,根据所述第一区域,能够快速有针对性的锁定所述待承载物的操作区,通过预调节处理,改变目标支撑柱和所述图像获取装置之间的距离,使得所述待承载物表面处在所述图像获取装置的景深中的尺寸大小发生变化,预调节目标支撑柱和图像获取装置之间的距离后,依据所述图像获取装置采集的所述待承载物的图像获取第二区域,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
附图说明
10.图1是本发明载片台的结构示意图;
11.图2是本发明载片台平整度的调节方法的流程示意图;
12.图3是本发明载片台平整度的调节方法中图像获取装置的景深的示意图;
13.图4是本发明第一区域位于第一平面上方的示意图;
14.图5是本发明第一区域位于第二平面下方的示意图;
15.图6是本发明载片台平整度的调节方法中获得第一分析图的流程示意图;
16.图7是本发明载片台平整度的调节方法中的清晰度分布图;
17.图8是将载片台上的支撑柱的位置信息记录所述清晰度分布图上的示意图;
18.图9是本发明第二区域的第一种示例;
19.图10是本发明第二区域的第二种示例;
20.图11是本发明第二区域的第三种示例;
21.图12是本发明第二区域的第四种示例;
22.图13是本发明载片台平整度的调节装置的结构示意图。
具体实施方式
23.由背景技术可知,目前,在面板自动光学检测设备中,进行全检扫描的探头一般不配备自动聚焦传感器,为了保证全检探头的聚焦清晰度,必须保证面板在机台内部的平面度水平不能超过全检镜头的景深。而在检测设备中,一般采用载片台对面板进行承载,在载片台上会有多个支撑面板的支撑柱(support pin),面板的平面度主要通过人工手动调节这些支撑柱的高度来保证,因数量众多且调节准确性要求较高,因此调平工作往往耗费很长的时间;且在一些情况下,即使确定了所述支撑柱的调节区域,但是支撑柱的调节方向错
误,也导致面板的调节效率较低。
24.为了解决所述技术问题,本发明实施例提供一种载片台平整度的调节方法,根据所述第一区域,能够快速有针对性的锁定所述待承载物的操作区,通过预调节处理,改变目标支撑柱和所述图像获取装置之间的距离,使得所述待承载物表面处在所述图像获取装置的景深中的尺寸大小发生变化,预调节目标支撑柱和图像获取装置之间的距离后,依据所述图像获取装置采集的所述待承载物的图像获取第二区域,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
25.为使本发明实施例的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
26.参考图1,提供载片台300,所述载片台300用于承载待承载物,所述载片台300包括多个支撑柱100(support pin)。
27.后续在所述载片台300上放置待检测的待承载物,采用载片台平整度的调节方法对所述待承载物进行调节。本实施例中,所述待承载物包括面板400,载片台300用于承载待检测的面板400进行自动光学检测(automatic optic inspection,简称aoi)。
28.所述支撑柱100用于支撑后续放置在载片台300上的面板400,在载片台300表面法线方向上,所述支撑柱100能够与载片台300发生相对位移,通过调节所述支撑柱100的高度可以来调整面板400表面的平面度,使得面板400表面的平面度较高,在面板400自动光学检测设备检测面板400的过程中,使得全检扫描的全检镜头即使在不配备自动聚焦传感器的情况下,也能够使得面板400的整个顶面位于全检镜头的景深范围(dof)中,使得面板400表面的平面度满足自动光学检测的要求。
29.本实施例中,通过手动调节的方式使得支撑柱100在所述载片台300的法线方向上发生相对移动。其他实施例中,支撑柱可以配备有相应的驱动系统,使得载片台上的各个支撑柱通过电动设备在所述载片台的法线方向上发生相对移动。
30.本实施例中,所述支撑柱100在所述载片台300上呈矩阵式排布。
31.与所述支撑柱100散乱无章的排布在所述载片台300上的情况相比,所述支撑柱100呈矩阵式排布,使得后续放置在支撑柱100上的面板400的各区域能够受到均匀的支撑,降低了因支撑柱100分布的稀疏或稠密,导致面板400表面存在凹陷或突出情况的概率。
32.图2是本发明载片台平整度的调节方法的流程示意图。
33.步骤s1,结合图2参考图3,通过图像获取装置10(如图3所示)采集待承载物的第一分析图。
34.所述图像获取装置10用于获取所述待承载物表面的图像。
35.所述图像获取装置10的景深(depth of field,dof)是从最近的聚焦物面到最远的聚焦物面的距离。在本实施例中,所述图像获取装置10的景深dof是第一平面a(最近的聚焦物面)和第二平面b(最远的聚焦物面)之间的区域。
36.本实施例中,所述图像获取装置10包括全检扫描探头和镜头。其他实施例中,图像获取装置还包括探测器,具体的所述探测器包括面阵探测器、线阵探测器。
37.本实施例中,所述图像获取装置10的景深范围为20μm~100μm。
38.本实施例中,所述图像获取装置10位于所述载片台300的上方,且在所述载片台300表面的法线方向上,所述图像获取装置10与所述待承载物之间的距离能够改变。
39.需要说明的是,所述载片台平整度的调节方法中,会在所述支撑柱100上放置待承载物,也就是放置面板400。
40.本实施例中,所述面板400包括:tn面板(twisted nematic,扭曲向列型)、ips面板(in-plane-switching,平面转换型)、va面板(vertical alignment,多象限垂直配向型)中的一种或多种。tn面板具有技术成熟,成本低等特点。且tn屏响应速度快,可以达到1ms的响应时间,不会出现残影,tn屏可无损呈现高速变化的场景细节。ips面板较硬,在色彩显示、可视角度等方面比tn面板好,具有较佳的色彩的呈现范围与准确性,广视角大,从不同角度观看都不会产生色偏。va面板的特点是具有较高的宽容度和对比度,可达到3000:1的高对比度,画面中黑色和白色都更加纯净,且不会出现漏光等问题。面板400还包括:lcd面板、oled面板或者手机显示屏面板等。
41.参考图4至图6,通过图像获取装置10采集待承载物的第一分析图的步骤包括:
42.步骤s11,通过所述图像获取装置对所述承载物进行成像,获取承载物的第一图像,第一图像上各点灰度值表征承载物表面对应点返回的光强度。
43.具体的,通过所述全检扫描探头和镜头,获取承载物的第一图像的步骤中,获取所述面板400的表面的第一图像。
44.需要说明的是,所述第一图像由多个像素组成。
45.步骤s12,获取所述第一图像的第一清晰度图像作为第一分析图,所述第一清晰度图像各点的清晰度值表征承载物表面对应单元区的第一图像的清晰度。
46.所述第一分析图为后续获取第一区域l1做准备。本实施例中,所述第一分析图包括清晰度分布图。
47.所述第一区域l1的形成情况有两种。作为第一种示例,图中曲线代表面板400的平面,所述面板400的部分表面位于所述第一平面的上方(如图4所示),作为第二种示例,图中曲线代表面板400的平面,是所述面板400的部分表面位于所述第一平面的下方(如图5所示)。
48.具体的,获取所述第一图像的第一清晰度图像作为第一分析图的步骤包括:将所述第一图像划分为多个单元区域,各单元区域包括多个像素。
49.具体的,将所述第一图像划分为多个单元区域的步骤中,将所述第一图像划分成多个矩形区域,每个矩形区域作为一个单元区域,为后续获取每个矩形区域的第一图像的灰度值做准备。
50.将所述第一图像划分成多个矩形区域的步骤中,矩形区域的大小根据第一图像的数据量以及所述后续形成的清晰度分布图的所需清晰程度来进行确定。
51.作为一种示例,将所述第一图像划分为多个单元区域的步骤中,所述矩形区域的边长均包括80像素至120像素。
52.具体的,获取所述第一图像的第一清晰度图像作为第一分析图的步骤还包括:根据梯度函数分别获取各单元区域的清晰度值,根据清晰度值与各单元区域的对应关系得到所述第一清晰度图像。
53.后续根据第一分析图,获取第一区域,也就是获得所述第一清晰度分布图中的非
均匀区域,非均匀区域对应的第一图像中灰度值较大区域,相应的获得面板400表面在所述图像获取装置中的离焦位置。后续根据非均匀区域,能够获得所述载片台300上需要调整的支撑柱100所处的位置。
54.本实施例中,所述梯度函数包括brenner梯度函数、tenengrad梯度函数、laplacian梯度函数、eav点锐度算法函数。本实施例中,采用brenner梯度函数对获取的每个所述矩形区域中第一图像的灰度值进行处理,获得所述第一图像的清晰度分布图。其他实施例中,还可以采用其他的函数对矩形区域中第一图像进行灰度处理。
55.brenner函数作为图像清晰度评价函数,brenner函数又叫做梯度滤波器法(gradient filter focusing method),其算法公式为
56.d(f)=∑y∑
x
|f(x+2,y)-f(x,y)|257.式中,d(f)为图像清晰度,f(x,y)表示图像f对应像素点(x,y)的灰度值。
58.当扫描探头扫描面板400表面时,面板400位于所述扫描探头的景深范围(dof)内时,也就是聚焦时,第一图像清晰,图像中的高频分量更多,突变像素与相邻像素的差值也会变大,基于这个原理,对每一个像素水平右侧邻域的两个灰度值相减再相乘,再逐个像素累加,计算相邻两个像素灰度差的平方,这就是brenner梯度函数的基本思想。
59.具体的,根据梯度函数分别获取各单元区域的清晰度值的步骤包括:依据所述第一图像的灰度值,获得所述矩形区域中每个像素点的清晰度值;对所述矩形区域的所述像素点的清晰度值求平均,获得每个所述矩形区域的平均清晰度值。
60.本实施例中,采用均值法获取第一图像的灰度值。
61.其他实施例中,所述第一分析图为灰度图像,通过图像获取装置采集待承载物的第一分析图的步骤包括:通过所述图像获取装置对所述承载物进行成像,获取第一图像,将所述第一图像作为所述第一分析图,第一分析图上各点灰度值表征承载物表面对应点返回的光强度。
62.步骤s2,在所述第一分析图中获取第一区域l1(如图4和图5所示),所述第一区域为均匀性小于或等于预设阈值的区域。
63.本发明实施例中所述第一图像由图像获取装置10依据待承载物获得的,所述第一分析图是依据所述第一图像获得的,因此所述第一分析图上各区域与所述待承载物上各区域相对应,从而根据所述第一分析图的第一区域l1,能够快速有针对性的锁定第一区域l1所对应的待承载物的操作区,后续确定操作区对应的目标支撑柱后,通过对操作区对应的目标支撑柱的高度进行调节,提高了面板400平面度的调节效率,且提高了面板400平面度的调节准确性,更易获得较好的面板400平面度。
64.本实施例中,根据所述第一分析图中获取第一区域l1的步骤包括:根据所述清晰度值及预设参数获取所述第一分析图的非均匀区域作为所述第一区域l1。其他实施例中,还根据所述灰度值及预设参数获取所述第一分析图的非均匀区域作为所述第一区域。
65.本实施例中,所述第一分析图是清晰度分布图,相应的,是根据清晰度分布图的所述清晰度值及预设参数获取所述第一分析图的非均匀区域。其他实施例中,第一分析图还可以是灰度图像,相应的,根据灰度图像的灰度值及预设参数获取所述第一分析图的非均匀区域。
66.本实施例中,获得所述第一分析图的非均匀区域(如图7中的实线框中),所述非均
匀区域为连续分布的多个单元区域所围成的区域。
67.所述第一区域的单元区域的均匀性小于或等于预设阈值;相邻所述单元区域之间的表征值之差的绝对值与相邻特征单元的比值大于预设阈值的单元区域。
68.需要说明的是,对表征进行解释,举例,a表征b的话,a和b有一个已知的关系。
69.所述表征值为灰度值或清晰度值;所述预设阈值为25%~35%。
70.所述第一图像是利用图像获取装置10获得的,所述清晰度分布图是根据第一图像中的灰度值进行处理获得的,获得所述清晰度分布图中的非均匀区域,就是获得第一图像表面灰度值较大区域,也就是获得面板400表面在所述图像获取装置中的离焦位置,通过调节载片台300上与离焦位置对应的支撑柱100,给离焦位置处的面板400以支撑或消除支撑,使得面板400的位置发生变化,提高了面板400平面度的调节效率,且提高了面板400平面度的调节准确性,更易获得较好的面板400平面度。
71.需要说明的是,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离之前:根据支撑柱100的位置信息将所述载片台300的所述支撑柱100标记在所述第一分析图上,形成支撑柱标记。
72.具体的,将所述载片台300上的所述支撑柱100等比的标记在所述清晰度分布图对应位置上。
73.步骤s3:根据所述第一区域l1获取所述待承载物的操作区,所述第一区域为所述待承载物操作区的第一分析图。
74.后续根据所述操作区,能够快速有针对性的锁定所述操作区对应的目标支撑柱,后续改变所述待承载物和图像获取装置10之间的距离,依据所述图像获取装置10采集的所述待承载物的图像获取第二区域,为后续比较所述第一区域l1和第二区域做准备。
75.具体的,根据所述第一区域l1获取所述待承载物的操作区的步骤包括:将与所述第一区域l1相对应的区域作为操作区(图7中实线框中)或者将包括所述第一区域l1对应的区域作为操作区。
76.步骤s4,根据所述操作区获取目标支撑柱,所述目标支撑柱为支撑所述操作区的支撑柱。
77.具体的,根据所述操作区获取目标支撑柱的步骤包括:根据所述第一分析图的操作区与支撑柱标记的相对位置关系,获取所述目标支撑柱(如图8实线框中所示)。
78.本实施例中,所述目标支撑柱包括:被所述操作区覆盖的支撑柱以及与所述操作区边缘的距离小于预设距离的支撑柱作为目标支撑柱;所述预设距离大于等于零,小于相邻支撑柱之间的距离。
79.此种情况下,同时调节操作区内部对应的支撑柱以及在操作区预设距离范围内的支撑柱,能够提高操作区平整度调节效率的同时,保证所述操作区待承载物的调节效果。
80.需要说明的是,当目标支撑柱仅位于所述操作区的内部时,确定的目标支撑柱的数量相对较少,后续对所述目标支撑柱调节所花费的工艺时间较少,有利于提高待承载物表面平整度的调节效率;且位于所述操作区内部的目标支撑柱对所述操作区的影响大于操作区外部的目标支撑柱对所述操作区的影响,后续仅对所述操作区内部的目标支撑柱进行调节,在提高操作区平整度调节效率的同时,保证所述操作区待承载物的调节效果。
81.其他实施例中,所述操作区对应的目标支撑柱包括:将包围所述操作区对应的所
述支撑柱作为所述目标支撑柱。
82.此种情况对应的是,当所述操作区的内部不具有目标支撑柱的情况。在此种情况下,只能通过调节包围所述操作区对应的目标支撑柱来调节操作区的待承载物的表面平整度。
83.此示例中,所述操作区的内部不具有目标支撑柱指代的是,所述操作区的内部不具有支撑柱,或者所述操作区的内部不具有完整支撑柱。
84.此示例中,所述操作区的内部具有目标支撑柱指代的是,所述操作区完全包含所述支撑柱。
85.需要说明的是,通常所述操作区的数量为多个。
86.步骤s5,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离。
87.所述图像获取装置10用于获取所述待承载物表面的图像,根据所述第一区域l1,能够快速有针对性的锁定所述待承载物的操作区,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离,使得所述待承载物表面处在所述图像获取装置10景深(dof)中的区域大小发生变化,预调节后,依据所述图像获取装置10采集的所述待承载物的图像获取第二区域,将所述第一区域l1和第二区域的尺寸大小进行比对,能够获得所述操作区对应的目标支撑柱的待调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
88.本实施例中,预调节所述面板400和图像获取装置10之间的距离的步骤包括:使所述承载台和所述图像获取装置10之间的距离增大或减小。
89.需要说明的是,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,沿着所述载片台300表面的法线方向改变所述操作区对应的目标支撑柱和图像获取装置10之间的距离。
90.沿着所述载片台300表面的法线方向改变所述距离,从而图像获取装置10在所述待承载物表面的投影的位置不变,从而后续获得第二区域的过程中,利用图像获取装置10得到的第一图像的中心与所述获得第一区域l1的过程中,利用图像获取装置10得到的第一图像的中心相重合,更易于判断出第二区域的位置。
91.本实施例中,沿着所述载片台300表面的法线方向,预调节所述承载台和所述图像获取装置10之间的距离的步骤包括:使所述操作区的所述目标支撑柱向着靠近或远离所述图像获取装置10的方向移动,或者,使所述图像获取装置10向着靠近或远离所述操作区的方向移动。其他实施例中,还可以使所述图像获取装置和所述目标支撑柱均向相互远离或靠近的方向移动。
92.本实施例中,通过调整所述图像获取装置10所处的位置,有利于降低改变所述面板400和图像获取装置10之间距离的难度,使得所述面板400与图像获取装置10之间的距离能够精确控制,易于后续过程中,精确获得所述操作区的目标支撑柱的待调节方向。
93.本实施例中,图像获取装置10通过步进电机、驱动液压机构、驱动气压装置或者伺服电机改变与面板400之间距离。
94.本实施例中,所述预调节距离小于所述图像获取装置的景深。具体的,所述预调节距离为所述图像获取装置10的景深的25%~35%。因为所述图像获取装置10的景深为20μm
~100μm。作为一种示例,当所述图像获取装置10的景深为20μm时,所述预调节距离为5μm至7μm;作为另一种示例,当所述图像获取装置10的景深为100μm时,所述预调节距离为25μm至35μm。
95.步骤s6,如图9至图12所示,所述预调节处理之后,依据所述图像获取装置采集所述待承载物的第二分析图,所述待承载物操作区的第二分析图为第二区域l2。
96.后续利用所述第一区域l1和所述第二区域l2作比对,获得所述操作区对应的目标支撑柱的待调节方向做准备。
97.通过图像获取装置10采集的所述待承载物的图像获取第二区域l2的步骤包括:通过所述图像获取装置对所述承载物进行成像,获取承载物的第二图像,第二图像上各点灰度值表征承载物表面对应点返回的光强度;获取所述第二图像的第二清晰度图像作为第二分析图,所述第二清晰度图像的清晰度值表征承载物表面对应单元区的第二图像的清晰度。
98.本实施例中,所述第二分析图包括清晰度分布图,所述预设参数为所述第二区域中的所述特征像素的清晰度值均大于相邻像素的清晰度值的30%。
99.其他实施例中,所述第二分析图包括灰度图像,通过图像获取装置获取待承载物的第二分析图的步骤包括:通过所述图像获取装置对所述承载物进行成像,获取第二图像,将所述第二图像作为所述第二分析图,第二分析图上各点灰度值表征承载物表面对应点返回的光强度。在灰度图像中,所述预设参数为所述第二区域中的所述特征像素的灰度值均大于相邻像素的灰度值的30%。
100.本实施例中,依据所述图像获取装置10采集的第二图像获取第二区域l2的过程与获得第一区域l1的过程相同,在此不赘述,第一区域l1和第二区域l2的区别在于第一区域l1预调节前获得的,第二区域l2是预调节后获得的。
101.需要说明的是,所述第二区域l2为连续分布的多个单元区域所围成的区域。
102.还需要说明的是,本发明实施例用于确定在具有第一区域l1时的操作区的目标支撑柱的待调节方向。
103.步骤s7,参考图9至图12,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向。
104.本发明实施例依据所述图像获取装置采集的所述待承载物的图像获取第二区域,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
105.本实施例中,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向包括:当所述第二区域中的离焦区小于第一区域中的离焦区时,目标支撑柱的调节方向使图像获取装置与承载台之间距离的变化方向与预调节处理相同;当所述第二区域中的离焦区大于第一区域中的离焦区时,目标支撑柱的调节方向使图像获取装置与承载台之间距离的变化方向与预调节处理相反。
106.其他实施例中,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向包括:当第二区域的清晰度大于所述第一区域的清晰
度时,目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相同;当第二区域的清晰度小于所述第一区域的清晰度时,目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相反。
107.在另外一些实施例中,根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向的步骤包括:获取所述第一图像的第一清晰度图像,所述第一清晰度图像各点的清晰度值表征承载物表面对应单元区的第一图像的清晰度;根据所述第一清晰度图像、第二分析图及预调节处理的调节方向,确定目标支撑柱的调节方向;或者,获取所述第二图像的第二清晰度图像,所述第二清晰度图像各点的清晰度值表征承载物表面对应单元区的第二图像的清晰度;根据所述第二清晰度图像、第一分析图及预调节处理的调节方向,确定目标支撑柱的调节方向。
108.目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相同,包括:当所述预调节处理使所述图像获取装置与承载台之间的距离减小时,所述目标支撑柱的调节方向为朝向所述图像获取装置;当所述预调节处理使所述图像获取装置与承载台之间的距离增加时,所述目标支撑柱的调节方向为背离所述图像获取装置;
109.目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相反,包括:当所述预调节处理使所述图像获取装置与承载台之间的距离减小时,所述目标支撑柱的调节方向为背离所述图像获取装置;当所述预调节处理使所述图像获取装置与承载台之间的距离增加时,所述目标支撑柱的调节方向为朝向所述图像获取装置。
110.下面结合图9至图12,根据第一分析图至第二分析图的变化及预调节处理的调节方向,判断目标支撑柱的调节方向进行说明。
111.第一示例,沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,使所述图像获取装置10向靠近所述待承载物的方向移动。其他实施例中,还可以使所述操作区对应的目标支撑柱向着靠近所述图像获取装置的方向移动。
112.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
113.相应的,在将所述第一区域l1和第二区域l2的尺寸大小进行比对的步骤中,所述第二区域l2大于所述第一区域l1,即操作区中的各个目标支撑柱向上偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向下调节使其位于焦平面内。
114.具体的,如图9所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2大于所述第一区域l1,即所述操作区为向上凸起的情形,故操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向。
115.第二示例,沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,使所述图像获取装置10向着远离所述载片台300的方向移动。其他实施例中,还可以使所述操作区对应的目标支撑柱向着远离所述图像获取装置10的方向移动。
116.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处
在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
117.相应的,在将所述第一区域l1和第二区域l2的尺寸大小进行比对的步骤中,所述第二区域l2小于所述第一区域l1,而操作区中的各个目标支撑柱向上偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向下调节使其位于焦平面内。
118.具体的,如图10所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2小于所述第一区域l1,即所述操作区为向上凸起的情形,故操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向。
119.第三示例,沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,使所述图像获取装置10向靠近所述面板400的方向移动。其他实施例中,还可以使所述操作区对应的目标支撑柱向着靠近所述图像获取装置的方向移动。
120.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
121.相应的,在将所述第一区域l1和第二区域l2的尺寸大小进行比对的步骤中,所述第二区域l2小于所述第一区域l1,即操作区中的各个目标支撑柱向下偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向上调节使其位于焦平面内。
122.具体的,如图11所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2小于所述第一区域l1,即所述操作区为向下凹陷的情形,故操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向。
123.第四示例,沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,使所述图像获取装置10向着远离所述载片台300的方向移动。其他实施例中,还可以使所述操作区对应的目标支撑柱向着远离所述图像获取装置的方向移动。
124.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
125.相应的,在将所述第一区域l1和第二区域l2的尺寸大小进行比对的步骤中,所述第二区域l2大于所述第一区域l1,即操作区中的各个目标支撑柱向下偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向上调节使其位于焦平面内。
126.具体的,如图12所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2大于所述第一区域l1,即所述操作区为向下凹陷的情形,故操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向。
127.本实施例中,在获得所述操作区的目标支撑柱的待调节方向后,基于所述操作区中的非均匀区域等于第二区域l2的状态下,对至少部分所述操作区的所述支撑柱100沿待
调整方向进行调节做准备。
128.其他实施例中,在改变所述面板和图像获取装置之间的距离后,会有部分所述操作区对应的区域变为均匀的区域,也会有部分原先处于均匀状态的区域变得不均匀。所述载片台平整度的调节方法还包括:获得所述操作区的目标支撑柱的待调节方向后,根据所述待调节方向对至少部分所述操作区的所述支撑柱进行调节处理前,沿第二方向使所述待承载物和图像获取装置之间的距离调整所述预调节距离,所述第二方向与所述第一方向相反。
129.沿第二方向使所述待承载物和图像获取装置之间的距离调整所述预调节距离,所述第二方向与所述第一方向相反,使得所述操作区中的非均匀区域为第一区域,为后续基于第一区域的状态下,对至少部分所述操作区的所述支撑柱沿待调整方向进行调节做准备。
130.步骤s8,根据所述待调节方向调节所述目标支撑柱。
131.根据所述待调节方向对至少部分所述操作区的所述支撑柱100进行调节处理,使得操作区上的面板400在所述图像获取装置10中的景深中,使得面板400具有较好的平面度。
132.本实施例中,采用手动调节的方式,使得支撑柱100在载片台300表面法线方向上发生移动。其他实施例中,支撑柱通过电动设备在所述载片台表面的法线方向上发生相对移动,例如步进电机、驱动液压机构、驱动气压装置或者伺服电机。
133.需要说明的是,本实施例中,根据所述待调节方向对至少部分所述操作区的所述支撑柱100进行调节处理。根据所述待调节方向对至少部分所述操作区的所述支撑柱100进行调节处理的意思是,当改变待承载物与图像获取装置10之间距离后,所述第二区域l2的数量与所述第一区域l1的数量相同,对全部所述操作区的所述支撑柱100沿待调节方向进行调节;当改变待承载物与图像获取装置10之间距离后,所述第二区域l2的数量少于所述第一区域l1的数量,对部分所述操作区的所述支撑柱100沿待调节方向进行调节。
134.相应的,本发明还提供一种载片台平整度的调节装置。参考图13,示出了本发明载片台平整度的调节装置的结构示意图。
135.所述载片台平整度的调节装置包括:载片台300,包括多个支撑柱,所述支撑柱用于承载待承载物;图像获取装置10,用于采集所述图像获取装置10与待承载物的间距不同时所述待承载物的图像;处理单元20,用于依据所述图像获取装置10采集的所述待承载物的第一分析图,在所述第一分析图中获取第一区域l1,所述第一区域l1为均匀性小于或等于预设阈值的区域;用于根据所述第一区域l1获取所述待承载物的操作区,所述第一区域l1为所述待承载物操作区的第一分析图;用于根据所述第一区域l1获取所述待承载物的操作区,所述第一区域l1为所述待承载物操作区的第一分析图;用于根据所述操作区获取目标支撑柱;用于依据所述图像获取装置10采集所述待承载物的第二分析图,所述待承载物操作区的第二分析图为第二区域;分析单元,用于根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向;调节单元,用于进行预调节处理,改变目标支撑柱和图像获取装置10之间的距离;用于根据分析单元确定的调节方向调节所述目标支撑柱。
136.本发明实施例所提供的载片台平整度的调节装置中,处理单元20用于根据所述第
一区域l1,能够快速有针对性的锁定所述待承载物的操作区,调节单元40,用于通过预调节处理,改变所述承载台和所述图像获取装置10之间的距离,使得所述待承载物表面处在所述图像获取装置10景深中的尺寸大小发生变化,处理单元20还用于在改变所述承载台和所述图像获取装置10之间的距离后,依据所述图像获取装置10采集的所述待承载物的图像获取第二区域l2,分析单元30用于根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向,能够获得所述操作区对应的目标支撑柱的待调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
137.本实施例中,所述待承载物包括面板400。
138.载片台300用于承载待检测的面板进行自动光学检测(automatic optic inspection,简称aoi)。
139.所述支撑柱100用于支撑放置在载片台300上的待承载物,所述支撑柱100能够与载片台300发生相对位移,通过调节所述支撑柱100的高度可以来调整面板400表面的平面度,使得面板400表面的平面度较高,在面板400自动光学检测设备检测面板400的过程中,使得全检扫描的全检镜头即使在不配备自动聚焦传感器的情况下,也能够使得面板400的整个顶面位于全检镜头的景深范围(dof)中,使得面板400表面的平面度满足自动光学检测的要求。
140.本实施例中,通过手动调节的方式使得支撑柱100在所述载片台300上发生相对移动。其他实施例中,支撑柱可以配备有相应的驱动系统,使得载片台上的各个支撑柱通过电动设备发生相对移动。
141.本实施例中,所述支撑柱100呈矩阵式排布。
142.与所述支撑柱100散乱无章的排布在所述载片台300上的情况相比,所述支撑柱100呈矩阵式排布,使得放置在支撑柱100上的面板的各区域能够受到均匀的支撑,降低了因支撑柱100分布的稀疏或稠密,导致面板表面存在凹陷或突出情况的概率。
143.所述图像获取装置10,用于采集所述图像获取装置与待承载物的间距不同时所述待承载物的图像。
144.所述图像获取装置10的景深(depth of field,dof)是从最近的聚焦物面到最远的聚焦物面的距离。在本实施例中,所述图像获取装置10的景深dof是第一平面a(最近的聚焦物面)和第二平面b(最远的聚焦物面)之间的区域。
145.本实施例中,所述图像获取装置10包括全检扫描探头和镜头。其他实施例中,图像获取装置还包括探测器,具体的所述探测器包括面阵探测器、线阵探测器。
146.本实施例中,所述图像获取装置10的景深范围为20μm~100μm。
147.本实施例中,所述图像获取装置10位于所述载片台300的上方,且在所述载片台300表面的法线方向上,所述图像获取装置10与所述待承载物之间的距离能够改变。
148.处理单元20,用于依据所述图像获取装置采集的所述待承载物的第一分析图。
149.所述处理单元20,用于通过所述图像获取装置对所述承载物进行成像,获取承载物的第一图像,第一图像上各点灰度值表征承载物表面对应点返回的光强度。
150.需要说明的是,所述第一图像由多个像素组成。
151.所述处理单元20,用于获取所述第一图像的第一清晰度图像作为第一分析图,所述第一清晰度图像各点的清晰度值表征承载物表面对应单元区的第一图像的清晰度。
152.所述第一分析图用于为获取第一区域l1做准备。本实施例中,所述第一分析图包括清晰度分布图。
153.所述第一区域l1的形成情况有两种。作为第一种示例,图中曲线代表面板400的平面,所述面板400的部分表面位于所述第一平面的上方(如图4所示),作为第二种示例,图中曲线代表面板400的平面,是所述面板400的部分表面位于所述第一平面的下方(如图5所示)。
154.所述处理单元20,用于将所述第一图像划分为多个单元区域,各单元区域包括多个像素。
155.具体的,所述处理单元20将所述第一图像划分成多个矩形区域,每个矩形区域作为一个单元区域,为后续获取每个矩形区域的第一图像的灰度值做准备。
156.将所述第一图像划分成多个矩形区域的步骤中,矩形区域的大小根据第一图像的数据量以及所述后续形成的清晰度分布图的所需清晰程度来进行确定。
157.作为一种示例,所述矩形区域的边长均包括80像素至120像素。
158.所述处理单元20,用于根据梯度函数分别获取各单元区域的清晰度值,根据清晰度值与各单元区域的对应关系得到所述第一清晰度图像。
159.所述第一清晰度分布图中的非均匀区域,非均匀区域对应的第一图像中灰度值较大区域,也就是第一分析图的第一区域,相应的获得面板400表面在所述图像获取装置中的离焦位置。后续根据非均匀区域,能够获得所述载片台300上需要调整的支撑柱100所处的位置。
160.本实施例中,所述梯度函数包括brenner梯度函数、tenengrad梯度函数、laplacian梯度函数、eav点锐度算法函数。本实施例中,采用brenner梯度函数对获取的每个所述矩形区域中第一图像的灰度值进行处理,获得所述第一图像的清晰度分布图。其他实施例中,还可以采用其他的函数对矩形区域中第一图像进行灰度处理。
161.brenner函数作为图像清晰度评价函数,brenner函数又叫做梯度滤波器法(gradient filter focusing method),其算法公式为
162.d(f)=∑y∑
x
|f(x+2,y)-f(x,y)|2163.式中,d(f)为图像清晰度,f(x,y)表示图像f对应像素点(x,y)的灰度值。
164.当扫描探头扫描面板400表面时,面板400位于所述扫描探头的景深范围(dof)内时,也就是聚焦时,第一图像清晰,图像中的高频分量更多,突变像素与相邻像素的差值也会变大,基于这个原理,对每一个像素水平右侧邻域的两个灰度值相减再相乘,再逐个像素累加,计算相邻两个像素灰度差的平方,这就是brenner梯度函数的基本思想。
165.具体的,根据梯度函数分别获取各单元区域的清晰度值的步骤包括:依据所述第一图像的灰度值,获得所述矩形区域中每个像素点的清晰度值;对所述矩形区域的所述像素点的清晰度值求平均,获得每个所述矩形区域的平均清晰度值。
166.本实施例中,采用均值法获取第一图像的灰度值。
167.其他实施例中,所述第一分析图为灰度图像,通过图像获取装置采集待承载物的第一分析图的步骤包括:通过所述图像获取装置对所述承载物进行成像,获取第一图像,将
所述第一图像作为所述第一分析图,第一分析图上各点灰度值表征承载物表面对应点返回的光强度。
168.所述处理单元20,用于在所述第一分析图中获取第一区域l1(如图4和图5所示),所述第一区域为均匀性小于或等于预设阈值的区域。
169.本发明实施例中所述第一图像由图像获取装置10依据待承载物获得的,所述第一分析图是依据所述第一图像获得的,因此所述第一分析图上各区域与所述待承载物上各区域相对应,从而根据所述第一分析图的第一区域l1,能够快速有针对性的锁定第一区域l1所对应的待承载物的操作区,后续确定操作区对应的目标支撑柱后,通过对操作区对应的目标支撑柱的高度进行调节,提高了面板400平面度的调节效率,且提高了面板400平面度的调节准确性,更易获得较好的面板400平面度。
170.本实施例中,所述处理单元20,用于根据所述清晰度值及预设参数获取所述第一分析图的非均匀区域作为所述第一区域l1。其他实施例中,所述处理单元,还用于根据所述灰度值及预设参数获取所述第一分析图的非均匀区域作为所述第一区域。
171.本实施例中,所述第一分析图是清晰度分布图,相应的,是根据清晰度分布图的所述清晰度值及预设参数获取所述第一分析图的非均匀区域。其他实施例中,第一分析图还可以是灰度图像,相应的,根据灰度图像的灰度值及预设参数获取所述第一分析图的非均匀区域。
172.本实施例中,获得所述第一分析图的非均匀区域(如图7中的实线框中),所述非均匀区域为连续分布的多个单元区域所围成的区域。
173.所述第一区域l1的单元区域的均匀性小于或等于预设阈值;相邻所述单元区域之间的表征值之差的绝对值与相邻特征单元的比值大于预设阈值的单元区域。
174.需要说明的是,对表征进行解释,举例,a表征b的话,a和b有一个已知的关系。
175.所述表征值为灰度值或清晰度值;所述预设阈值为25%~35%。
176.所述第一图像是利用图像获取装置10获得的,所述清晰度分布图是根据第一图像中的灰度值进行处理获得的,获得所述清晰度分布图中的非均匀区域,就是获得第一图像表面灰度值较大区域,也就是获得面板400表面在所述图像获取装置中的离焦位置,通过调节载片台300上与离焦位置对应的支撑柱100,给离焦位置处的面板400以支撑或消除支撑,使得面板400的位置发生变化,提高了面板400平面度的调节效率,且提高了面板400平面度的调节准确性,更易获得较好的面板400平面度。
177.需要说明的是,所述处理单元20,用于根据支撑柱100的位置信息将所述载片台300的所述支撑柱100标记在所述第一分析图上,形成支撑柱标记。
178.具体的,将所述载片台300上的所述支撑柱100等比的标记在所述清晰度分布图对应位置上。
179.所述处理单元20,用于根据所述第一区域l1获取所述待承载物的操作区,所述第一区域l1为所述待承载物操作区的第一分析图。
180.根据所述操作区,能够快速有针对性的锁定所述操作区对应的目标支撑柱,后续改变所述待承载物和图像获取装置10之间的距离,依据所述图像获取装置10采集的所述待承载物的图像获取第二区域,为后续比较所述第一区域l1和第二区域做准备。
181.所述处理单元20,用于根据所述操作区获取目标支撑柱(如图8实线框中所示)。
182.本实施例中,所述目标支撑柱包括:被所述操作区覆盖的支撑柱以及与所述操作区边缘的距离小于预设距离的支撑柱作为目标支撑柱;所述预设距离大于等于零,小于相邻支撑柱之间的距离。
183.此种情况下,同时调节操作区内部对应的支撑柱以及在操作区预设距离范围内的支撑柱,能够提高操作区平整度调节效率的同时,保证所述操作区待承载物的调节效果。
184.需要说明的是,当目标支撑柱仅位于所述操作区的内部时,确定的目标支撑柱的数量相对较少,后续对所述目标支撑柱调节所花费的工艺时间较少,有利于提高待承载物表面平整度的调节效率;且位于所述操作区内部的目标支撑柱对所述操作区的影响大于操作区外部的目标支撑柱对所述操作区的影响,后续仅对所述操作区内部的目标支撑柱进行调节,在提高操作区平整度调节效率的同时,保证所述操作区待承载物的调节效果。
185.其他实施例中,将包围所述操作区对应的所述支撑柱作为所述目标支撑柱。
186.此种情况对应的是,当所述操作区的内部不具有目标支撑柱的情况。在此种情况下,只能通过调节包围所述操作区对应的目标支撑柱来调节操作区的待承载物的表面平整度。
187.此示例中,所述操作区的内部不具有目标支撑柱指代的是,所述操作区的内部不具有支撑柱,或者所述操作区的内部不具有完整支撑柱。
188.此示例中,所述操作区的内部具有目标支撑柱指代的是,所述操作区完全包含所述支撑柱。
189.需要说明的是,通常所述操作区的数量为多个。
190.调节单元40,用于进行预调节处理,改变目标支撑柱和图像获取装置之间的距离。
191.所述图像获取装置10用于获取所述待承载物表面的图像,根据所述第一区域l1,能够快速有针对性的锁定所述待承载物的操作区,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离,使得所述待承载物表面处在所述图像获取装置10景深(dof)中的区域大小发生变化,预调节后,依据所述图像获取装置10采集的所述待承载物的图像获取第二区域,将所述第一区域l1和第二区域的尺寸大小进行比对,能够获得所述操作区对应的目标支撑柱的待调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
192.本实施例中,所述调节单元40,用于使所述承载台和所述图像获取装置10之间的距离增大或减小。
193.本实施例中,所述调节单元40,用于沿着所述载片台300表面的法线方向改变所述操作区对应的目标支撑柱和图像获取装置10之间的距离。
194.沿着所述载片台300表面的法线方向改变所述距离,从而图像获取装置10在所述待承载物表面的投影的位置不变,从而在获得第二区域的过程中,利用图像获取装置10得到的第一图像的中心与所述获得第一区域l1的过程中,利用图像获取装置10得到的第一图像的中心相重合,更易于判断出第二区域的位置。
195.本实施例中,所述调节单元40,用于使所述操作区的所述目标支撑柱向着靠近或远离所述图像获取装置10的方向移动,或者,使所述图像获取装置10向着靠近或远离所述操作区的方向移动。其他实施例中,所述调节单元40,还用于使所述图像获取装置和所述目
标支撑柱均向相互远离或靠近的方向移动。
196.本实施例中,通过调整所述图像获取装置10所处的位置,有利于降低改变所述面板400和图像获取装置10之间距离的难度,使得所述面板400与图像获取装置10之间的距离能够精确控制,易于精确获得所述操作区对应的目标支撑柱的待调节方向。
197.本实施例中,图像获取装置10通过步进电机、驱动液压机构、驱动气压装置或者伺服电机改变与面板400之间距离。
198.本实施例中,所述预调节距离小于所述图像获取装置的景深。具体的,所述预调节距离为所述图像获取装置10的景深的25%~35%。因为所述图像获取装置10的景深为20μm~100μm。作为一种示例,当所述图像获取装置10的景深为20μm时,所述预调节距离为5μm至7μm;作为另一种示例,当所述图像获取装置10的景深为100μm时,所述预调节距离为25μm至35μm。
199.处理单元20,用于依据所述图像获取装置10采集所述待承载物的第二分析图,所述待承载物操作区的第二分析图为第二区域l2。
200.获取所述操作区处的第二区域l2,为分析单元30利用所述第一区域l1和所述第二区域l2作比对,获得所述操作区对应的目标支撑柱的待调节方向做准备。
201.所述处理单元20,通过所述图像获取装置对所述承载物进行成像,获取承载物的第二图像,第二图像上各点灰度值表征承载物表面对应点返回的光强度;获取所述第二图像的第二清晰度图像作为第二分析图,所述第二清晰度图像的清晰度值表征承载物表面对应单元区的第二图像的清晰度。
202.本实施例中,所述第二分析图包括清晰度分布图,所述预设参数为所述第二区域中的所述特征像素的清晰度值均大于相邻像素的清晰度值的30%。
203.其他实施例中,所述处理单元20,用于通过所述图像获取装置对所述承载物进行成像,获取第二图像,将所述第二图像作为所述第二分析图,第二分析图上各点灰度值表征承载物表面对应点返回的光强度。在灰度图像中,所述预设参数为所述第二区域中的所述特征像素的灰度值均大于相邻像素的灰度值的30%。
204.本实施例中,依据所述图像获取装置10采集的图像获取第二区域l2的过程与获得第一区域l1的过程相同,在此不赘述,第一区域l1和第二区域l2的区别在于第一区域l1预调节前获得的,第二区域l2是预调节后获得的。
205.需要说明的是,所述第二区域l2为连续分布的多个单元区域所围成的区域。
206.还需要说明的是,本发明实施例用于确定在具有第一区域l1时的操作区对应的目标支撑柱的待调节方向。
207.分析单元30,用于根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向。
208.本发明实施例根据所述第一分析图至所述第二分析图的变化及预调节处理的调节方向,确定目标支撑柱的调节方向,避免盲目地调节操作区对应的目标支撑柱,使得目标支撑柱的调节有章可循,提高了待承载物平面度的调节效率,且提高了待承载物平面度的调节准确性,更易获得更好的待承载物平面度。
209.本实施例中,所述分析单元30,用于当所述第二区域l2中的离焦区小于第一区域l1中的离焦区时,目标支撑柱的调节方向使图像获取装置与承载台之间距离的变化方向与
预调节处理相同;用于当所述第二区域中的离焦区大于第一区域中的离焦区时,目标支撑柱的调节方向使图像获取装置与承载台之间距离的变化方向与预调节处理相反。
210.其他实施例中,所述分析单元,用于当第二区域的清晰度大于所述第一区域的清晰度时,目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相同;用于当第二区域的清晰度小于所述第一区域的清晰度时,目标支撑柱的调节方向使图像获取装置与承载物之间距离的变化方向与预调节处理相反。
211.在另外一些实施例中,所述分析单元,用于获取所述第一图像的第一清晰度图像,所述第一清晰度图像各点的清晰度值表征承载物表面对应单元区的第一图像的清晰度;用于根据所述第一清晰度图像、第二分析图及预调节处理的调节方向,确定目标支撑柱的调节方向;或者,用于获取所述第二图像的第二清晰度图像,所述第二清晰度图像各点的清晰度值表征承载物表面对应单元区的第二图像的清晰度;用于根据所述第二清晰度图像、第一分析图及预调节处理的调节方向,确定目标支撑柱的调节方向。
212.作为一种示例,所述分析单元确定的目标支撑柱的调节方向与所述调节单元的预调节处理的调节方向相同,包括:当所述预调节处理使所述图像获取装置与承载台之间的距离减小时,所述目标支撑柱的调节方向为朝向所述图像获取装置;当所述预调节处理使所述图像获取装置与承载台之间的距离增加时,所述目标支撑柱的调节方向为背离所述图像获取装置。
213.作为另一种示例,所述分析单元确定的目标支撑柱的调节方向与所述调节单元的预调节处理的调节方向相反,包括:当所述预调节处理使所述图像获取装置与承载台之间的距离减小时,所述目标支撑柱的调节方向为背离所述图像获取装置;当所述预调节处理使所述图像获取装置与承载台之间的距离增加时,所述目标支撑柱的调节方向为朝向所述图像获取装置。
214.下面结合图9至图12,根据第一分析图至第二分析图的变化及预调节处理的调节方向,判断目标支撑柱的调节方向进行说明。
215.第一示例,调节单元40,用于沿着所述载片台300表面的法线方向,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,调节单元40,用于使所述图像获取装置10向靠近所述待承载物的方向移动。其他实施例中,调节单元,还可以用于使所述操作区对应的目标支撑柱向着靠近所述图像获取装置的方向移动。
216.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
217.相应的,分析单元30,用于获得所述第二区域l2大于所述第一区域l1,即操作区中的各个目标支撑柱向上偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向下调节使其位于焦平面内。
218.具体的,如图9所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2大于所述第一区域l1,即所述操作区为向上凸起的情形,故操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向。
219.作为第二种示例,调节单元40,用于沿着所述载片台300表面的法线方向,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,调节单元40,用于使所述图像
获取装置10向着远离所述载片台300的方向移动。其他实施例中,调节单元,还可以用于使所述操作区对应的目标支撑柱向着远离所述图像获取装置的方向移动。
220.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
221.相应的,分析单元30,用于获得所述第二区域l2小于所述第一区域l1,即操作区中的各个目标支撑柱向上偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向下调节使其位于焦平面内。
222.具体的,如图10所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2小于所述第一区域l1,即所述操作区为向上凸起的情形,故操作区对应的目标支撑柱的待调节方向为背离所述图像获取装置10的方向。
223.第三示例,调节单元40,用于沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,调节单元40,用于使所述图像获取装置10向靠近所述面板400的方向移动。其他实施例中,还可以使所述操作区对应的目标支撑柱向着靠近所述图像获取装置的方向移动。
224.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
225.相应的,分析单元30,用于获得所述第二区域l2小于所述第一区域l1,即操作区中的各个目标支撑柱向下偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向上调节使其位于焦平面内。
226.具体的,如图11所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2小于所述第一区域l1,即所述操作区为向下凹陷的情形,故操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向。
227.第四示例,调节单元40,用于沿着所述载片台300表面的法线方向,进行预调节处理,改变目标支撑柱和图像获取装置之间的距离的步骤中,使所述承载台和所述图像获取装置10之间的距离减小。本实施例中,调节单元40,用于使所述图像获取装置10向着远离所述载片台300的方向移动。其他实施例中,调节单元,还可以用于使所述操作区对应的目标支撑柱向着远离所述图像获取装置的方向移动。
228.使所述承载台和所述图像获取装置10之间的距离减小,使得所述面板400表面处在所述图像获取装置10景深中的区域大小发生变化,相应的面板400在所述图像获取装置10中的离焦范围发生变化,从而操作区的非均匀区域发生变化。
229.相应的,分析单元30,用于获得所述第二区域l2大于所述第一区域l1,即操作区中的各个目标支撑柱向下偏离焦平面,所述操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向,使得操作区中的各个目标支撑柱向上调节使其位于焦平面内。
230.具体的,如图12所示,当使所述承载台和所述图像获取装置10之间的距离减小时,所述第二区域l2大于所述第一区域l1,即所述操作区为向下凹陷的情形,故操作区对应的目标支撑柱的待调节方向为靠近所述图像获取装置10的方向。
231.本实施例中,在获得所述操作区对应的目标支撑柱的待调节方向后,基于所述操作区中的非均匀区域等于第二区域l2的状态下,对至少部分所述操作区的所述支撑柱100沿待调整方向进行调节做准备。
232.其他实施例中,在改变所述面板和图像获取装置之间的距离后,会有部分所述操作区对应的区域变为均匀的区域,也会有部分原先处于均匀状态的区域变得不均匀。所述载片台平整度的调节方法还包括:获得所述操作区对应的目标支撑柱的待调节方向后,根据所述待调节方向对至少部分所述操作区的所述支撑柱进行调节处理前,沿第二方向使所述待承载物和图像获取装置之间的距离调整所述预调节距离,所述第二方向与所述第一方向相反。
233.沿第二方向使所述待承载物和图像获取装置之间的距离调整所述预调节距离,所述第二方向与所述第一方向相反,使得所述操作区中的非均匀区域为第一区域,为基于第一区域的状态下,对至少部分所述操作区的所述支撑柱沿待调整方向进行调节做准备。
234.调节单元40,用于根据分析单元30确定的调节方向调节所述目标支撑柱。
235.根据所述待调节方向对至少部分所述操作区的所述支撑柱100进行调节处理,使得操作区上的面板400在所述图像获取装置10中的景深中,使得面板400具有较好的平面度。
236.本实施例中,采用手动调节的方式,使得支撑柱100在载片台300表面法线方向上发生移动。其他实施例中,支撑柱通过电动设备在所述载片台表面的法线方向上发生相对移动,例如步进电机、驱动液压机构、驱动气压装置或者伺服电机。
237.本实施例中,根据所述待调节方向对至少部分所述操作区的所述支撑柱100进行调节处理的意思是,当改变待承载物与图像获取装置10之间距离后,所述第二区域l2的数量与所述第一区域l1的数量相同,对全部所述操作区的所述支撑柱100沿待调节方向进行调节;当改变待承载物与图像获取装置10之间距离后,所述第二区域l2的数量少于所述第一区域l1的数量,对部分所述操作区的所述支撑柱100沿待调节方向进行调节。
238.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1