一种田间作物中心区域定位方法及系统
1.本发明涉及作物的自动识别和定位技术领域,特别是涉及一种田间作物中心区域定位方法及系统。
背景技术:
2.基于机器视觉的作物自动识别和定位技术有助于实现作物的自动检测,快速获取作物的田间分布情况,可以为田间机械化作业、作物表型监测和农机导航提供帮助。当前研究,多应用二维图像信息或三维点云数据对作物进行自动识别和定位。作物的二维图像包括彩色图像、热红外图像、光谱图像等,包含作物的颜色、纹理、温度、光谱信息等;作物的三维点云数据包含作物的三维位置、空间信息;利用作物上述信息的特异性及分布特征,可实现作物的识别和定位。但是,用于获取作物热红外图像、光谱图像、点云数据的传感器或设备较为昂贵,不易于推广应用。作物的彩色图像更加容易获取,因而基于彩色图像的作物识别和定位一直是研究的热点。
3.基于彩色图像的作物识别和定位方法通常利用作物的彩色图像,计算作物的颜色分量和纹理信息,分割提取作物,然后检测作物的轮廓及连通区域,计算作物连通区域的质心实现作物中心区域的定位。定位作物中心区域可以为田间机械化作业、作物表型监测(测量)和农机导航提供帮助。但计算作物连通区域质心的方法难以对形状不规则的作物进行准确定位。此外,随着作物的生长,相邻作物会出现叶片重叠、交叉的情况,计算作物连通区域的质心难以实现多株作物的定位。部分研究采用作物骨架提取的方法定位作物的中心区域,通过检测和判断作物骨架中的交叉点来识别和定位作物的中心区域,但该方法效率较低且精确度较差。随着机器视觉技术的发展,深度学习技术(如fast rcnn、faster rcnn、mask rcnn等)被广泛地应用于作物的检测和定位,取得了较好的效果。但深度学习技术需要大量的标记样本,工作量较大。
4.综上,本领域亟需一种能够准确、快速得到农田中每株作物的中心区域的方法,从而为田间机械化作业、作物表型监测和农机导航提供帮助。
技术实现要素:
5.本发明的目的是提供一种田间作物中心区域定位方法及系统,能够准确、快速得到农田中每株作物的中心区域,从而为田间机械化作业、作物表型监测和农机导航提供帮助。
6.为实现上述目的,本发明提供了如下方案:
7.一种田间作物中心区域定位方法,所述方法包括:
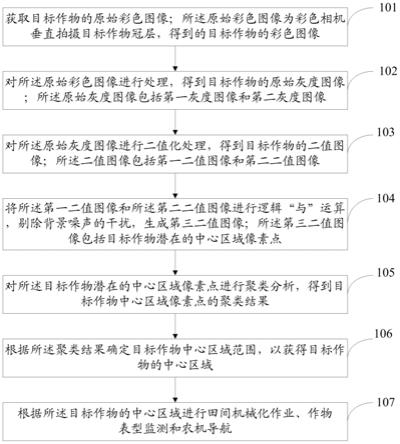
8.获取目标作物的原始彩色图像;所述原始彩色图像为彩色相机垂直拍摄目标作物冠层,得到的目标作物的彩色图像;
9.对所述原始彩色图像进行处理,得到目标作物的原始灰度图像;所述原始灰度图像包括第一灰度图像和第二灰度图像;
10.对所述原始灰度图像进行二值化处理,得到目标作物的二值图像;所述二值图像包括第一二值图像和第二二值图像;
11.将所述第一二值图像和所述第二二值图像进行逻辑“与”运算,剔除背景噪声的干扰,生成第三二值图像;所述第三二值图像包括目标作物潜在的中心区域像素点;
12.对所述目标作物潜在的中心区域像素点进行聚类分析,得到目标作物中心区域像素点的聚类结果;
13.根据所述聚类结果确定目标作物中心区域范围,以获得目标作物的中心区域;
14.根据所述目标作物的中心区域进行田间机械化作业、作物表型监测和农机导航。
15.可选地,所述对所述原始彩色图像进行处理,得到目标作物的原始灰度图像,具体包括:
16.提取所述原始彩色图像的每个像素点在rgb颜色空间的r分量、g分量和b分量;
17.根据所述r分量、所述g分量和所述b分量确定所述原始彩色图像在hsv颜色空间中的s分量;
18.根据所述s分量得到目标作物的第一灰度图像;
19.采用所述r分量、所述g分量和所述b分量对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像。
20.可选地,所述根据所述r分量、所述g分量和所述b分量确定所述原始彩色图像在hsv颜色空间中的s分量,具体包括:
21.确定所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值;
22.根据所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值,得到hsv颜色空间中每个像素点的s分量。
23.可选地,所述采用所述r分量、所述g分量和所述b分量对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像,具体包括:
24.采用所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像。
25.可选地,所述对所述原始灰度图像进行二值化处理,得到目标作物的二值图像,具体包括:
26.获取预设分割阈值;
27.采用所述预设分割阈值对所述第一灰度图像进行分割处理,获得目标作物的第一二值图像;
28.利用最大类间方差法确定所述第二灰度图像的转换阈值;
29.根据所述转换阈值对所述第二灰度图像进行转换,得到目标作物的第二二值图像。
30.可选地,所述预设分割阈值为0.95。
31.可选地,所述对所述原始灰度图像进行二值化处理,得到目标作物的二值图像,之后还包括:
32.对所述第一二值图像和所述第二二值图像进行形态学“开”运算去噪处理。
33.可选地,所述对所述目标作物潜在的中心区域像素点进行聚类分析,得到目标作物中心区域像素点的聚类结果,具体包括:
34.提取所述第三二值图像中的中心区域像素点坐标,应用dbscan聚类算法对所有所述中心区域像素点坐标进行聚类处理,得到分类后的所述中心区域像素点坐标;其中,每一类所述中心区域像素点坐标对应每一株作物的中心区域;所述中心区域为中心区域像素点的平面分布。
35.可选地,所述根据所述聚类结果确定目标作物中心区域范围,以获得目标作物的中心区域,具体包括:
36.分别对每一类所述中心区域像素点坐标进行统计,获得中心区域像素点在行坐标方向的最大值x
max
、列坐标方向的最大值y
max
和行坐标方向的最小值x
min
、列坐标方向的最小值y
min
;
37.根据行坐标方向的最大值x
max
和行坐标方向的最小值x
min
,采用公式x
length
=x
max
‑
x
min
确定中心区域像素点在行坐标方向的长度x
length
;
38.根据列坐标方向的最大值y
max
和列坐标方向的最小值y
min
,采用公式y
length
=y
max
‑
y
min
确定中心区域像素点在列坐标方向的长度y
length
;
39.利用行坐标方向的最小值x
min
、列坐标方向的最小值y
min
、行坐标方向的最大值x
max
、列坐标方向的最大值y
max
、中心区域像素点在行坐标方向的长度x
length
和中心区域像素点在列坐标方向的长度y
length
绘制矩形框;所述矩形框为每一株目标作物的中心区域。
40.本发明还提供了如下方案:
41.一种田间作物中心区域定位系统,所述系统包括:
42.彩色图像获取模块,用于获取目标作物的原始彩色图像;所述原始彩色图像为彩色相机垂直拍摄目标作物冠层,得到的目标作物的彩色图像;
43.彩色图像处理模块,用于对所述原始彩色图像进行处理,得到目标作物的原始灰度图像;所述原始灰度图像包括第一灰度图像和第二灰度图像;
44.灰度图像处理模块,用于对所述原始灰度图像进行二值化处理,得到目标作物的二值图像;所述二值图像包括第一二值图像和第二二值图像;
45.第三二值图像生成模块,用于将所述第一二值图像和所述第二二值图像进行逻辑“与”运算,剔除背景噪声的干扰,生成第三二值图像;所述第三二值图像包括目标作物潜在的中心区域像素点;
46.聚类分析模块,用于对所述目标作物潜在的中心区域像素点进行聚类分析,得到目标作物中心区域像素点的聚类结果;
47.中心区域确定模块,用于根据所述聚类结果确定目标作物中心区域范围,以获得目标作物的中心区域;
48.中心区域应用模块,用于根据所述目标作物的中心区域进行田间机械化作业、作物表型监测和农机导航。
49.根据本发明提供的具体实施例,本发明公开了以下技术效果:
50.本发明公开的田间作物中心区域定位方法及系统,通过对目标作物的原始彩色图像进行处理,得到原始灰度图像,对原始灰度图像进行二值化处理,得到二值图像,对二值图像进行逻辑“与”运算,生成新的二值图像,新的二值图像包括目标作物潜在的中心区域像素点,对目标作物潜在的中心区域像素点进行聚类分析,得到中心区域像素点的聚类结果,根据聚类结果确定中心区域范围,从而准确、快速得到农田中每株作物的中心区域,为
田间机械化作业、作物表型监测和农机导航提供帮助。
附图说明
51.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
52.图1为本发明田间作物中心区域定位方法实施例一的流程图;
53.图2为本发明田间作物中心区域定位方法实施例二的简易流程示意图;
54.图3为本发明田间作物中心区域定位方法实施例二的整体流程示意图;
55.图4为本发明田间作物中心区域定位方法实施例二的目标作物的第一灰度图像示意图;
56.图5为本发明田间作物中心区域定位方法实施例二的去噪后的第一二值图像示意图;
57.图6为本发明田间作物中心区域定位方法实施例二的目标作物的第二灰度图像示意图;
58.图7为本发明田间作物中心区域定位方法实施例二的去噪后的第二二值图像示意图;
59.图8为本发明田间作物中心区域定位方法实施例二中目标作物中心区域像素点提取结果示意图;
60.图9为本发明田间作物中心区域定位方法实施例二中目标玉米潜在中心区域像素点聚类结果示意图;
61.图10为本发明田间作物中心区域定位方法实施例二中目标玉米的中心区域定位结果示意图;
62.图11为本发明田间作物中心区域定位系统实施例三的结构图。
具体实施方式
63.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
64.本发明的目的是提供一种田间作物中心区域定位方法及系统,能够准确、快速得到农田中每株作物的中心区域,从而为田间机械化作业、作物表型监测和农机导航提供帮助。
65.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
66.实施例一
67.图1为本发明田间作物中心区域定位方法实施例一的流程图。参见图1,该田间作物中心区域定位方法包括:
68.步骤101:获取目标作物的原始彩色图像;所述原始彩色图像为彩色相机垂直拍摄目标作物冠层,得到的目标作物的彩色图像。
69.步骤102:对所述原始彩色图像进行处理,得到目标作物的原始灰度图像;所述原始灰度图像包括第一灰度图像和第二灰度图像。
70.该步骤102具体包括:
71.提取所述原始彩色图像的每个像素点在rgb(red,green,blue)颜色空间的r分量、g分量和b分量;即对所述原始彩色图像的每个像素点提取rgb颜色空间的r分量、g分量和b分量,得到所述原始彩色图像在rgb颜色空间中的r分量、g分量和b分量。
72.根据所述r分量、所述g分量和所述b分量确定所述原始彩色图像在hsv(hue,saturation,value)颜色空间中的s分量。
73.根据所述s分量得到目标作物的第一灰度图像。
74.确定所述原始彩色图像在rgb颜色空间中的分量。
75.采用所述r分量、所述g分量和所述b分量对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像。
76.其中,根据所述r分量、所述g分量和所述b分量确定所述原始彩色图像在hsv颜色空间中的s分量,根据所述s分量得到目标作物的第一灰度图像,具体包括:确定所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值。根据所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值,得到hsv颜色空间中每个像素点的s分量。根据所述s分量得到目标作物的第一灰度图像。即计算所述原始彩色图像在hsv颜色空间中的s分量,获得目标作物的第一灰度图像。具体为:彩色图像的每个像素点可以提取到rgb颜色空间的r分量、g分量和b分量,有常用的通用公式可以根据三个分量转换计算得到hsv颜色空间中每个像素点的h分量、s分量和v分量。将每个像素点的s分量计算出来,获得以s分量值为大小的第一灰度图像。
77.其中,采用所述r分量、所述g分量和所述b分量对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像,具体包括:采用所述r分量的灰度值、所述g分量的灰度值和所述b分量的灰度值对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像。即应用所述原始彩色图像在rgb颜色空间的分量,对所述原始彩色图像进行灰度化处理,获得目标作物的第二灰度图像。具体为:根据公式i
gray
(i,j)=g(i,j)*1.262
‑
r(i,j)*0.884
‑
b(i,j)*0.311计算得到第二灰度图像;式中,i、j为像素点的行、列坐标,g(i,j)、r(i,j)和b(i,j)分别为原始彩色图像(i,j)处像素点g分量、r分量和b分量的灰度值,i
gray
(i,j)为第二灰度图像(i,j)处像素点的灰度值。
78.步骤103:对所述原始灰度图像进行二值化处理,得到目标作物的二值图像;所述二值图像包括第一二值图像和第二二值图像。
79.该步骤103具体包括:
80.获取预设分割阈值。所述预设分割阈值为0.95。
81.采用所述预设分割阈值对所述第一灰度图像进行分割处理,获得目标作物的第一二值图像。
82.利用最大类间方差法确定所述第二灰度图像的转换阈值。
83.根据所述转换阈值对所述第二灰度图像进行转换,得到目标作物的第二二值图
像。
84.具体为:设置分割阈值,利用所述分割阈值对所述第一灰度图像进行分割处理,获得目标作物的第一二值图像;所述第一二值图像中,白色像素点为潜在的作物中心区域像素点,灰度值为1,黑色像素点为背景,灰度值为0。
85.利用最大类间方差法计算所述第二灰度图像的转换阈值,根据所述转换阈值对所述第二灰度图像进行转换,得到目标作物的第二二值图像;所述第二二值图像中白色像素点为作物,灰度值为1,黑色像素点为背景,灰度值为0。
86.步骤104:将所述第一二值图像和所述第二二值图像进行逻辑“与”运算,剔除背景噪声的干扰,生成第三二值图像;所述第三二值图像包括目标作物潜在的中心区域像素点。
87.所述第三二值图像中目标作物潜在的中心区域像素点灰度值为1。
88.步骤105:对所述目标作物潜在的中心区域像素点进行聚类分析,得到目标作物中心区域像素点的聚类结果。
89.该步骤105具体包括:
90.提取所述第三二值图像中的中心区域像素点坐标,应用基于密度聚类的dbscan(density
‑
based spatial clustering ofapplications withnoise)聚类算法对所有所述中心区域像素点坐标进行聚类处理,得到分类后的所述中心区域像素点坐标;其中,每一类所述中心区域像素点坐标对应每一株作物的中心区域;所述中心区域为中心区域像素点的平面分布。
91.通过采用dbscan算法对目标作物潜在中心区域的像素点进行聚类操作,能够获得目标作物各株的中心区域像素点。
92.步骤106:根据所述聚类结果确定目标作物中心区域范围,以获得目标作物的中心区域。
93.该步骤106具体包括:
94.分别对每一类所述中心区域像素点坐标进行统计,获得中心区域像素点在行坐标方向的最大值x
max
、列坐标方向的最大值y
max
和行坐标方向的最小值x
min
、列坐标方向的最小值y
min
;
95.根据行坐标方向的最大值x
max
和行坐标方向的最小值x
min
,采用公式x
length
=x
max
‑
x
min
确定中心区域像素点在行坐标方向的长度x
length
;
96.根据列坐标方向的最大值y
max
和列坐标方向的最小值y
min
,采用公式y
length
=y
max
‑
y
min
确定中心区域像素点在列坐标方向的长度y
length
;
97.利用行坐标方向的最小值x
min
、列坐标方向的最小值y
min
、行坐标方向的最大值x
max
、列坐标方向的最大值y
max
、中心区域像素点在行坐标方向的长度x
length
和中心区域像素点在列坐标方向的长度y
length
绘制矩形框;所述矩形框为每一株目标作物的中心区域。
98.该步骤106计算步骤105中同一类别目标作物中心区域像素点的行坐标、列坐标的最大值和最小值,然后计算中心区域在行坐标和列坐标方向的长度,生成目标作物中心区域像素点的包围矩阵,最终实现目标作物中心区域的定位。
99.步骤107:根据所述目标作物的中心区域进行田间机械化作业、作物表型监测和农机导航。
100.进一步的,步骤103之后利用形态学“开操作”去除第一二值图像和第二二值图像
中地面噪声的干扰,具体包括:
101.应用正方形结构元素对所述第一二值图像和所述第二二值图像进行形态学“开”运算去噪处理,去除地面噪声点的干扰。
102.实施例二
103.图2为本发明田间作物中心区域定位方法实施例二的简易流程示意图。图3为本发明田间作物中心区域定位方法实施例二的整体流程示意图。该实施例二选用玉米为研究对象,在田间环境下,利用玉米彩色图像实现玉米中心区域定位。参见图2,该田间作物中心区域定位方法总体上包括:
104.步骤1:基于玉米作物的原始彩色图像,获取玉米作物的灰度图像和二值图像。
105.步骤2:基于所述玉米作物的二值图像,获得玉米作物中心区域坐标。
106.参见图3,该田间作物中心区域定位方法具体包括以下步骤:
107.调整彩色相机的位置,使相机垂直拍摄玉米作物冠层,采集玉米作物的彩色图像。该彩色图像包含多株玉米作物。
108.利用玉米作物的彩色图像rgb颜色空间中红(r)、绿(g)、蓝(b)分量的灰度值,计算获得hsv颜色空间下玉米作物s分量的灰度值,获得如图4所示的第一灰度图像。
109.利用下列公式对玉米作物的彩色图像进行灰度转换,生成如图6所示的第二灰度图像:
110.i
gray
(i,j)=g(i,j)*1.262
‑
r(i,j)*0.884
‑
b(i,j)*0.311
111.其中i、j为像素的行列坐标,g(i,j)、r(i,j)和b(i,j)分别为图像(i,j)处像素g、r、b颜色分量的灰度值,i
gray
(i,j)为转换后图像(i,j)处像素的灰度值。
112.设置分割阈值为th=0.95,分割处理第一灰度图像,生成包含玉米作物中心区域像素点的第一二值图像,第一二值图像中白色像素点为潜在的作物中心区域像素点,灰度值为1,黑色像素点为背景,灰度值为0。
113.应用最大类间方差法计算分割阈值为139,分割处理第二灰度图像,将第二灰度图像转换为包含玉米作物的第二二值图像,第二二值图像中白色像素点为玉米作物,灰度值为1,黑色像素点为背景,灰度值为0。
114.应用正方形结构元素对第一二值图像和第二二值图像进行形态学“开”运算,以去除地面噪声点的干扰。本实施例选择像素大小为2像素和5像素的正方形结构元素分别对第一二值图像和第二二值图像进行开运算,消除细小的噪声干扰,结果分别如图5和图7所示,其中图5为去噪后的第一二值图像,图7为去噪后的第二二值图像。
115.对处理后的第一二值图像和第二二值图像进行逻辑“与”运算,剔除背景噪声的干扰,生成潜在的中心区域像素点灰度值为1的第三二值图像。具体为:首先,对处理后的第一二值图像和第二二值图像进行逻辑“与”运算,保留灰度值均为1或0的像素点,生成第三二值图像,其中玉米中心区域像素点灰度值为1。然后,提取灰度值为1的像素点获得连通的玉米中心区域像素点,并进行膨胀处理,结果显示在玉米作物图像上如图8所示。
116.提取第三二值图像中的中心区域像素点坐标,应用dbscan聚类算法对获得的中心区域像素点进行聚类处理,获得玉米作物中心区域像素点的平面分布。具体为:获得中心区域像素点后,采用dbscan聚类算法对所有像素点进行聚类处理,确定分类的数目(玉米作物的数量),得到分类后的中心区域像素点,划分的每一类中心区域像素点均对应一株玉米作
物的中心区域。由于玉米作物株间有一定的间隔,中心区域像素点会存在明显的划分,在玉米作物中心区域,像素点的密度会比较大,因此采用dbscan聚类算法可以根据像素点的密度对提取的像素点进行自动分类,从而自动识别图像中的玉米作物数量,划分出多类中心区域像素点,其中,每一类中心区域像素点均对应一株玉米作物的中心区域。通过对图8所示的中心区域像素点进行聚类分析,选用dbscan算法对像素点聚类,结果显示在玉米作物图像上如图9所示,图9中共包括3类像素点,一类像素点对应一株玉米作物,为了区分3类像素点,一类像素点采用一种形状标记。本实施例中检索半径设置为20像素点,检索的最小数目设置为30像素点,检测共得到如图9所示的3类像素点,对应图9中的3株玉米作物。
117.对同一类别的作物中心区域像素点进行统计,获得中心区域像素点在行坐标、列坐标方向的最大值x
max
、y
max
和最小值xmin、y
min
,然后根据下列公式计算中心区域像素点在行坐标和列坐标方向的长度x
length
、y
length
:
118.x
length
=x
max
‑
x
min
119.yl
ength
=y
max
‑
y
min
120.利用x
min
,y
min
,x
max
,y
max
,x
length
和y
length
绘制矩形框,最终定位作物的中心区域。参见图10,本实施例中共检测到3株玉米的中心区域,中心区域像素点在行坐标、列坐标方向的最大值和最小值(x
max
,y
max
,x
min
,y
min
)分别为(232,385,221,366)、(207,603,195,577)和(220,101,201,85),在行坐标和列坐标方向的长度(x
length
,y
length
)分别为(11,19)、(12,26)和(19,16)。
121.本发明公开的田间作物中心区域定位方法,为田间环境下基于机器视觉的作物中心区域定位方法,可以有效排除田间作物形状不规则、叶片重叠的干扰,即有效排除作物自身形状及相邻作物叶片的干扰,提高作物中心区域定位的精度和速度。
122.实施例三
123.图11为本发明田间作物中心区域定位系统实施例三的结构图。参见图11,该田间作物中心区域定位系统包括:
124.彩色图像获取模块1101,用于获取目标作物的原始彩色图像;所述原始彩色图像为彩色相机垂直拍摄目标作物冠层,得到的目标作物的彩色图像。
125.彩色图像处理模块1102,用于对所述原始彩色图像进行处理,得到目标作物的原始灰度图像;所述原始灰度图像包括第一灰度图像和第二灰度图像。
126.灰度图像处理模块1103,用于对所述原始灰度图像进行二值化处理,得到目标作物的二值图像;所述二值图像包括第一二值图像和第二二值图像。
127.第三二值图像生成模块1104,用于将所述第一二值图像和所述第二二值图像进行逻辑“与”运算,剔除背景噪声的干扰,生成第三二值图像;所述第三二值图像包括目标作物潜在的中心区域像素点。
128.聚类分析模块1105,用于对所述目标作物潜在的中心区域像素点进行聚类分析,得到目标作物中心区域像素点的聚类结果。
129.中心区域确定模块1106,用于根据所述聚类结果确定目标作物中心区域范围,以获得目标作物的中心区域。
130.中心区域应用模块1107,用于根据所述目标作物的中心区域进行田间机械化作业、作物表型监测和农机导航。
131.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
132.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1